
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
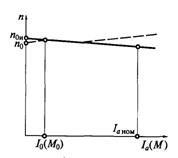
Рис. 22.1. Скоростная (механическая) характеристика двигателя независимого возбуждения
Если, как показано в подразд. 19.4, поток якоря вызывает уменьшение потока возбуждения (Ф = Ф0-ΔФ), то выражение для частоты вращения будет иметь вид
n=(c1U - Iа ∑ Rа)/(Ф0-ΔФ), (22.6)
где Ф0 — магнитный поток, соответствующий номинальному току возбуждения Iв ном при холостом ходе двигателя; ΔФ — уменьшение магнитного потока из-за размагничивающего действия реакции якоря.
Как следует из формулы (22.6), при возрастании тока якоря в результате падения напряжения Iа ∑ Rа частота вращения п снижается, а при уменьшении потока Ф — увеличивается. Это показано на рис. 22.1 штриховой линией.
Если относительное значение суммарного сопротивления цепи якоря ∑Rа*больше относительного значения уменьшения потока ΔФ*, то частота вращения с ростом тока якоря будет уменьшаться. Если же ∑Rа*< ΔФ*, то частота вращения с ростом тока якоря будет увеличиваться и такая характеристика будет неустойчивой (см. подразд. 22.4).
Размагничивающее действие реакции якоря обычно начинается при токах якоря, превышающих% номинального значения, т. е. скоростная характеристика может иметь возрастающий характер (см. штриховую линию на рис. 22.1), начиная с этих значений токов.
2. Моментная характеристика М=f(Iа). Аналитически эта характеристика описывается формулой (19.6)
М= cФIа.
Как следует из этого уравнения, если магнитная цепь двигателя ненасыщена и магнитный поток Ф = const, то зависимость М(Iа) линейная и с ростом тока якоря электромагнитный момент пропорционально увеличивается. Моментная характеристика в этом случае соответствует изображенной на рис. 22.2 прямой сплошной линии, выходящей из начала координат.

Рис. 22.2. Моментная характеристика двигателя независимого (параллельного) возбуждения
Действительная моментная характеристика вследствие уменьшения магнитного потока из-за размагничивающего действия реакции якоря (Ф = Ф0 - ΔФ) будет отклоняться от прямой линии (штриховая линия на рис. 22.2).
3. Механическая характеристика n=f(М). Аналитическое выражение механической характеристики можно получить из уравнения (22.6), если выразить в нем ток якоря Iа через электромагнитный момент в соответствии с формулой (19.6):
Ia = M/[с(Ф0-ΔФ)]. (22.7)
Тогда
n = c1U/[с(Ф0 - ΔФ)] - c1M ∑ Rа/[с(Ф0 - ΔФ)] . (22.8)
Из уравнения (22.8) следует, что механическая характеристика двигателя имеет такой же вид, как и скоростная, т. е. изображенная на рис. 22.1 скоростная характеристика в другом масштабе будет являться механической характеристикой.
Работа двигателя при Iа = 0 и М = 0 называется идеальным холостым ходом. Согласно уравнению (22.6), частота вращения при идеальном холостом ходе
n0и= c1U/Ф0. (22.9)
В двигателях независимого возбуждения изменение частоты вращения при переходе от холостого хода (М=М0) к номинальной нагрузке (М=Мном) составляет лишь 2…5 %. Такие слабопадающие механические и скоростные характеристики называются жесткими.
Двигатели последовательного и смешанного возбуждения. Особенностью двигателя последовательного возбуждения является то, что его ток возбуждения равен току якоря (Iв = Ia), и поэтому для вывода выражений, определяющих вид его характеристик, предварительно необходимо определить связь между магнитным потоком Ф и током якоря Iа = Iв. Зависимость Ф =f(Iа) называется магнитной характеристикой. Идеальная магнитная характеристика (без учета размагничивающего действия реакции якоря) показана на рис. 22.3 сплошной линией, а реальная (с учетом реакции якоря) — штриховой.
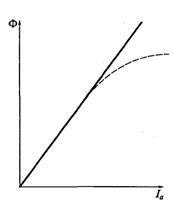
Рис. 22.3. Магнитная характеристика двигателя последовательного возбуждения
Все характеристики двигателя последовательного возбуждения получают при постоянном напряжении питания (обычно при U= Uном).
1. Скоростная характеристика п = f(Ia). Подставив в уравнение (22.5) выражение для потока в зависимости от тока якоря в соответствии с магнитной характеристикой, получим формулу скоростной характеристики двигателя. Для упрощения анализа пренебрежем насыщением магнитной цепи и будем считать магнитную характеристику линейной:
Ф= сФ Ia (22.10)
Тогда, подставив выражение (22.10) в уравнение (22.5), получим
n = c1(U - Iа ∑ Rа)/( сФ Ia)= c1U /( сФ Ia) - c1 ∑ Rа)/сФ. (22.11)
Из уравнения (22.11) следует, что скоростная характеристика имеет гиперболический вид; на рис. 22.4 она изображена сплошной линией. Особенностью скоростной характеристики двигателя последовательного возбуждения является ее большая крутизна в области малых значений тока якоря. Из уравнения (22.11) следует также, что ось ординат (ось n) является для этой характеристики асимптотой.
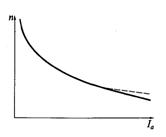
Рис. 22.4. Скоростная характеристика двигателя последовательного возбуждения
Реальная скоростная характеристика с учетом размагничивающего действия реакции якоря будет отклоняться от гиперболической кривой вверх, как показано штриховой линией на рис. 22.4.
2. Моментная характеристика М=f(Iа). Подставив в уравнение (19.6) выражение (22.10), получим формулу для электромагнитного момента двигателя с последовательным возбуждением:
М= ссфIа2. (22.12)
Из выражения (22.12) следует, что электромагнитный момент двигателя последовательного возбуждения пропорционален квадрату тока якоря, т. е. моментная характеристика имеет параболический вид; на рис. 22.5 она изображена сплошной линией. С учетом размагничивающего действия реакции якоря момент в области больших токов будет меньше момента, получаемого по выражению (22.12) (штриховая линия на рис. 22.5).
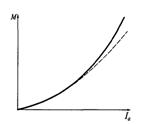
Рис. 22.5. Моментная характеристика двигателя последовательного возбуждения
3. Механическая характеристика n=f(Iа). Из выражения (22.12) ток якоря
 (22.13)
(22.13)
Тогда, подставив (22.13) в (22.11), получим аналитическое выражение для механической характеристики:
 (22.14)
(22.14)
Из выражения (22.14) следует, что механическая характеристика двигателя последовательного возбуждения при U=const так же, как и его скоростная характеристика, имеет практически гиперболический вид (рис. 22.6). Особенностью механической характеристики двигателя последовательного возбуждения является ее большая крутизна в области малых значений тока якоря. Из уравнения (22.14) следует также, что ось ординат (ось п) является асимптотой для этой характеристики.
Рис. 22.6. Механическая характеристика двигателя последовательного возбуждения
При М→0 частота вращения двигателя стремится к бесконечности. В этом случае говорят, что двигатель идет вразнос. Чрезмерное повышение частоты вращения опасно для механической прочности якоря, так как из-за больших значений центробежных сил, возникающих в этом случае, может нарушиться целость бандажей, удерживающих обмотку якоря, и произойти разрушение коллектора. Следовательно, нельзя допускать работу двигателя последовательного возбуждения при холостом ходе и малых нагрузках, т. е. нагрузка не должна быть меньше 25...30% номинальной. Лишь для двигателей малой мощности (десятки ватт) допустима работа при холостом ходе, так как их собственный момент потерь М0 достаточно велик.
Вследствие сильной зависимости частоты вращения от нагрузки механические и скоростные характеристики двигателей последовательного возбуждения называют мягкими.
Характеристики двигателей смешанного возбуждения занимают промежуточное положение между соответствующими характеристиками двигателей параллельного и последовательного возбуждения. При слабой последовательной обмотке они будут приближаться к характеристикам двигателя параллельного возбуждения, а при сильной — к характеристикам двигателя последовательного возбуждения.
Сравнение характеристик двигателей. Двигатели параллельного (независимого) возбуждения имеют жесткую механическую характеристику и поэтому применяются в установках, где необходимо поддерживать постоянную частоту вращения при изменении момента нагрузки, например, в станках, прокатных станах, вентиляторах и т. д. Они также широко применяются при необходимости регулирования частоты вращения в широком диапазоне. В этом случае подводимое к якорю двигателя напряжение изменяется в широких пределах, в то время как напряжение возбуждения остается неизменным.
В двигателях последовательного возбуждения электромагнитный момент имеет квадратичную зависимость от тока якоря, поэтому их применение предпочтительно, когда требуются большие пусковые моменты и наблюдаются частые перегрузки по моменту. Связано это с тем, что при одних и тех же колебаниях момента сопротивления ток и потребляемая мощность у двигателей последовательного возбуждения изменяются существенно меньше, чем у двигателей параллельного возбуждения. Двигатели последовательного возбуждения находят широкое применение на электрическом транспорте и в подъемных устройствах.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
