
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral

Рис. 16.3. Векторная диаграмма явнополюсного синхронного двигателя
Аналогично можно показать, что при отстающем токе продольная реакция якоря оказывает намагничивающее действие.
16.2. Угловые и U-образные характеристики синхронного двигателя
Синхронный двигатель потребляет электрическую мощность Р1 сети. Часть этой мощности расходуется на электрические потери в обмотке якоря Рэл1 и магнитные потери в стали якоря Рм, оставшаяся часть — электромагнитная мощность Рэм — передается вращающимся магнитным полем на ротор:
Рэм = Р1 - Рэл1 - Рм
Частично мощность Рэм расходуется на покрытие механических Рмех и добавочных РД потерь, оставшаяся же ее часть Р2 является полезной механической мощностью на валу двигателя.
Уравнения для электромагнитной мощности синхронного двигателя можно получить из векторных диаграмм. Если пренебречь потерями в статоре (Р эл1 и Рм), то для двигателя с независимой системой возбуждения будут справедливы те же выражения, что и генератора (см. гл. 15). Так, если принять, что Р1 = Рэм = Р, то для явнополюсного и неявнополюсного двигателей можно соответственно записать

(16.3)
![]()
Электромагнитный момент получают делением электромагнитной мощности на угловую скорость поля ω1.
Поскольку большая часть синхронных двигателей — машины явнополюсные, далее будем рассматривать именно этот конструктивный вариант двигателя. Тогда

(16.4)
В двигателе электромагнитный вращающий момент направлен в сторону вращения ротора, а за счет составляющей момента М" (реактивного момента) двигатель может работать и при отсутствии возбуждения (т. е. при Iв = 0 и E10 = 0).
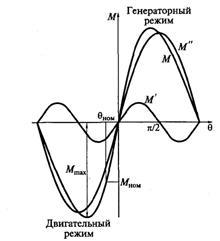
Рис. 16.4. Угловая характеристика электромагнитного момента явнополюсной синхронной машины
На рис. 16.4 показана угловая моментная характеристика М=f(θ) синхронной машины, работающей параллельно с сетью. Как и в синхронном генераторе, устойчивой является часть характеристики двигателя от начала координат до точки максимального момента Mmaх, характеризующего ее перегрузочную способность. Угловая моментная характеристика представляет собой механическую характеристику синхронного двигателя. При номинальном моменте на валу угол θном = 20…30°.
Отношение kм = Мmах /Мном называется кратностью максимального момента и характеризует перегрузочную способность двигателя. Согласно ГОСТ 183—74** кратность максимального момента должна быть не менее 1,65.
Как видно из уравнения (16.4), момент, развиваемый синхронным двигателем, пропорционален первой степени подводимого напряжения U1 т. е. синхронный двигатель менее чувствителен к изменению напряжения сети, чем асинхронный двигатель. Кроме того, максимальный момент можно увеличивать путем увеличения тока возбуждения (в формуле момента ему соответствует ЭДС E10). Все это позволяет уменьшить расчетную перегрузочную способность kм cинхронного двигателя по сравнению с асинхронным.
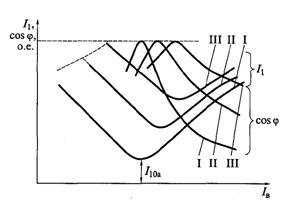
Рис. 16.5. U-образные характеристики синхронного двигателя и соответствующие им зависимости коэффициента мощности от тока возбуждения:
I - P = 0 ; II - P = 0,25Рном ; III - P = 0,5Рном
U-образные характеристики двигателя, которые так же, как и для генератора, можно построить по векторным диаграммам (см. гл. 15), при разных значениях активной мощности двигателя Р представлены на рис. 16.5 (U1 = const, f1 = const). При работе с опережающим током синхронный двигатель перевозбужден, а при работе с отстающим током — недовозбужден. При перевозбуждении двигатель генерирует реактивную мощность, что способствует повышению cosφ в узле нагрузки. Кроме того, уменьшение потребления реактивной мощности позволяет снизить реактивную мощность, вырабатываемую синхронными генераторами на электрических станциях, уменьшить ток и потери в линиях электропередачи. Возможность генерировать реактивную мощность выгодно отличает синхронные двигатели от асинхронных, которые потребляют реактивную мощность из сети для возбуждения. Поэтому синхронные двигатели проектируются для работы при номинальной мощности с перевозбуждением (опережающим током) и cosφном = 0,9. Работа с перевозбуждением предпочтительна также и для повышения максимального момента двигателя.
Уменьшение тока возбуждения приводит к уменьшению перегрузочной способности неявнополюсного двигателя, так как Рmax=т1U1Е10/хс. Предел уменьшения тока возбуждения в зоне не-довозбуждения показан на рис. 16.5 штриховой линией, для которой справедливо соотношение Рmах = Рi где Рi = const — постоянная мощность на валу, при которой строится i-я U-образная характеристика. Если и дальше уменьшать ток возбуждения, то Рmax станет меньше мощности приводимого механизма и двигатель выпадает из синхронизма. Иными словами, штриховой линией на этом рисунке показан предел статической устойчивости двигателя.
На рис. 16.5 приведены также зависимости соsφ =f(Iв) при различных значениях Р (или М). Эти кривые показывают, что при изменении нагрузки синхронные двигатели могут работать с заданным значением соsφ (в том числе и при соsφ = 1) за счет регулирования тока возбуждения.
Как видно из U-образной характеристики, соответствующей холостому ходу двигателя (кривая I), ток в ее минимальной точке (в отличие от тока холостого хода генератора — см. рис. 15.9) равен не нулю, а активной составляющей тока холостого хода двигателя I10a. Соответствующая этому току мощность Р10, потребляемая из сети, расходуется на покрытие потерь холостого хода двигателя.
16.3. Рабочие характеристики синхронного двигателя
Рабочие характеристики синхронного двигателя могут быть построены или при постоянном возбуждении (Iв = const), или при постоянном коэффициенте мощности (соsφ = const). На рис. 16.6 показаны рабочие характеристики синхронного двигателя — зависимости M, Р1, Iв, I1, η=f(P2) при f1 = const и соsφ = cosφном = const.
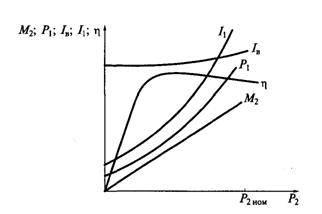
Рис. 16.6. Рабочие характеристики синхронного двигателя при соsφ = const
Зависимость нагрузочного момента на валу М2 от полезной мощности Р2 имеет линейный характер, так как угловая скорость ротора ω2 = ω1= const и M2 = Р2/ ω2 = const. Как следует из рис. 16.5, для поддержания соsφ = сonst с увеличением нагрузки ток возбуждения Iв следует увеличивать.
При холостом ходе (Р2 = 0) двигатель потребляет из сети мощность, необходимую для покрытия собственных потерь (в основном магнитных и механических). Следовательно, при холостом ходе ток статора не равен нулю. С возрастанием мощности нагрузки Р2 увеличивается и потребляемая мощность Р1 так как Р1 = Р2 + ∑Р, где ∑Р — суммарные потери в двигателе.
С увеличением Р2 возрастает и ток I1. Зависимость КПД от Р2 имеет такой же характер, как и для асинхронных двигателей, а максимум КПД достигается при нагрузке, меньше номинальной.
16.4. Способы пуска синхронных двигателей
Существуют следующие способы пуска синхронных двигателей: асинхронный, частотный и с помощью разгонного двигателя.
Наибольшее распространение получил асинхронный пуск, который аналогичен пуску асинхронного двигателя. Предусмотренная для этой цели в полюсных наконечниках ротора пусковая обмотка выполняется по типу короткозамкнутой обмотки ротора асинхронного двигателя и имеет ту же конструкцию, что и демпферная обмотка синхронных генераторов (см. подразд. 12.1).
При пуске трехфазная обмотка статора синхронного двигателя включается в сеть, при этом протекающий по ней ток создает круговое вращающееся магнитное поле, которое, перемещаясь относительно ротора, наводит в его короткозамкнутой пусковой обмотке ЭДС и ток. В результате взаимодействия тока пусковой обмотки ротора с вращающимся магнитным полем якоря образуется асинхронный момент, под действием которого ротор начинает ускоряться и достигает частоты вращения п2, близкой к частоте вращения магнитного поля п1.
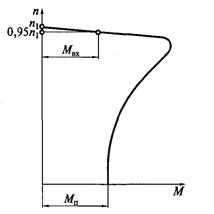
Рис. 16.7. Механическая характеристика синхронного двигателя при асинхронном пуске с разомкнутой обмоткой возбуждения
Механическая характеристика синхронного двигателя при асинхронном пуске (рис. 16.7) аналогична механической характеристике асинхронного двигателя (см. подразд. 11.1).
Ненагруженный двигатель может втянуться в синхронизм под действием реактивного момента. Если же реактивного момента оказывается недостаточно, то втягивание в синхронизм происходит после подачи постоянного тока в обмотку возбуждения за счет возникающего при этом синхронизирующего момента. С этого времени машина начинает работать как синхронный двигатель.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
