
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В начальный момент реверсирования посредством изменения полярности подводимого к цепи якоря напряжения скорость скачком измениться не может, и ЭДС обмотки якоря сохраняет свой знак. Для этого момента времени уравнение равновесия (22.2) можно записать в виде
-U=E+ Iа ∑ Rа.
При этом значение тока якоря можно получить из уравнения (22.16), откуда следует, что, как и в предыдущем случае, необходимо принимать меры по его ограничению.
22.6. Способы регулирования частоты вращения
Согласно уравнению (22.5), частоту вращения двигателя можно регулировать тремя способами: изменением напряжения якоря U, изменением сопротивления цепи якоря ∑ Rа и изменением потока возбуждения Ф. При сопоставлении характеристик двигателя в процессе регулирования за исходную принимают скоростную или механическую характеристики, полученные при номинальных значениях напряжения и тока возбуждения, а также при отсутствии добавочных сопротивлений в цепи якоря. Такую характеристику называют естественной. Характеристики, полученные при неноминальных значениях напряжения и тока возбуждения или при наличии добавочного сопротивления в цепи якоря, называют искусственными.
Изменение подводимого напряжения. При рассмотрении этого способа регулирования частоты вращения двигателя полагают неизменными сопротивление цепи якоря и ток возбуждения. В этом случае частота вращения двигателя постоянного тока примерно пропорциональна приложенному напряжению U. Поскольку работа двигателя при U>Uном обычно недопустима по потенциальным условиям работы коллектора, то данный способ позволяет регулировать частоту вращения вниз от значения, соответствующего естественной характеристике.
Скоростные n=f(Iа) и механические n=f(M) характеристики двигателя независимого возбуждения при Iв, ∑ Rа = const и U=var показаны на рис. 22.10. Эти характеристики представляют собой параллельные прямые линии, поскольку при одном и том же токе якоря Iа падение напряжения Iа ∑ Rа и размагничивающее действие якоря для них одинаковые.
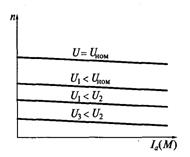
Рис. 22.10. Скоростные и механические характеристики двигателя при плавном изменении напряжения, подводимого к цепи якоря
Частным случаем регулирования частоты вращения изменением напряжения является импульсное регулирование. В этом случае постоянное по значению и направлению напряжение U периодически подается на якорь в виде отдельных импульсов (рис. 22.11). При таком питании среднее значение напряжения на якоре, определяющее частоту вращения двигателя,
Uном =(tи / Ти)U=γU, (22.17)
где tи и Ти — продолжительности соответственно каждого из импульсов и периода их следования; γ — продолжительность включения.
При импульсном питании в установившемся режиме ток якоря Ia будет иметь пульсирующий характер, как показано на рис. 22.12. Пульсирующий ток якоря можно разложить на среднюю (постоянную) Iaср и переменную составляющие. Вращающий момент двигателя создается постоянной составляющей тока. Переменная составляющая увеличивает потери мощности и нагрев двигателя, а также ухудшает коммутацию. Особенно опасен режим прерывистого тока, когда Iamin = 0 в течение некоторого времени. Следовательно, при использовании импульсного регулирования напряжения приходится снижать номинальную мощность двигателя или принимать меры для уменьшения переменной составляющей тока (например, с помощью сглаживающих фильтров). Пульсации тока якоря приводят к пропорциональным пульсациям электромагнитного момента и частоты вращения. Пульсации скорости при необходимости можно уменьшить путем искусственного увеличения момента инерции привода.
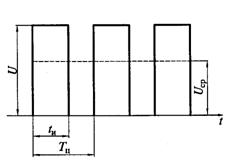
Рис. 22.11. Импульсное регулирование напряжения

Рис. 22.12. Изменение тока якоря при импульсном регулировании напряжения
Регулирование частоты вращения изменением напряжения, рассмотренное на примере двигателей параллельного и независимого возбуждения, применимо и для двигателей последовательного и смешанного возбуждения. Путем изменения подводимого напряжения можно получить диапазон регулирования скорости от 10:1 до 100:1. Кроме того, при этом способе регулирования частоты вращения КПД двигателя практически остается неизменным. Регулирование целесообразно осуществлять при постоянном моменте.
Изменение сопротивления цепи якоря. При рассмотрении этого способа регулирования полагают неизменными ток возбуждения Iв двигателя и напряжение сети U. Для изменения сопротивления ∑ Rа в цепь якоря последовательно включают регулировочный реостат Rад (рис. 22.13). При одном и том же токе якоря Iа, а следовательно, и электромагнитном моменте М это приводит к уменьшению частоты вращения двигателя (так как чем больше сопротивление Rад тем меньше скорость).
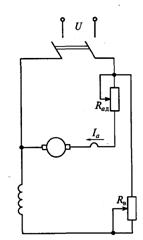
Рис. 22.13. Схема включения регулировочного реостата Кт в цепь якоря
Механические (скоростные) характеристики двигателей независимого и параллельного возбуждения при различных значениях ∑ Rа показаны на рис. 22.14. Характеристика при Rад = 0 является естественной. Из уравнения (22.5) следует, что все эти характеристики выходят из одной точки, соответствующей частоте вращения %, при идеальном холостом ходе (М=0; Iа = 0):
n0и= c1U/Ф0.
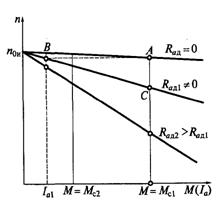
Рис. 22.14. Механические (скоростные) характеристики при изменении сопротивления цепи якоря
Рассматриваемым способом можно уменьшать частоту вращения в широких пределах, вплоть до нулевого значения. Однако при низких частотах вращения механические характеристики оказываются крутопадающими, что соответствует нестабильной работе двигателя. Нестабильность заключается в том, что небольшие колебания момента сопротивления Mс вызывают относительно большие колебания частоты вращения или даже остановку двигателя. Это обстоятельство во многих случаях ограничивает пределы регулирования частоты вращения данным способом. Диапазон регулирования скорости при номинальном моменте обычно не превышает 10:1.
Регулирование частоты вращения изменением сопротивления цепи якоря, рассмотренное на примере двигателей параллельного и независимого возбуждения, применимо и для двигателей последовательного и смешанного возбуждения.
Изменение магнитного потока. При рассмотрении этого способа регулирования полагают неизменными сопротивление и напряжение цепи якоря. Регулирование магнитного потока при этом осуществляется изменением тока возбуждения двигателя. Так как в номинальном режиме, соответствующем естественной характеристике, магнитная цепь двигателя рассчитывается на работу почти с максимальным значением магнитного потока (на колене кривой холостого хода), то увеличение тока возбуждения не приводит к заметному росту потока. Поэтому поток изменяют в сторону уменьшения от расчетного значения путем снижения тока возбуждения.
Уменьшение магнитного потока, как следует из формулы (22.5), приводит к увеличению частоты вращения, т. е. в этом случае осуществляется регулирование частоты вращения вверх от основного значения. Если не учитывать изменение магнитного потока из-за реакции якоря, то скоростные характеристики п=f(Iа) двигателей независимого и параллельного возбуждения (при U=const; Iв = const) будут представлять собой прямые линии — сплошные на рис. 22.15. С уменьшением магнитного потока увеличивается скорость идеального холостого хода n0и. Все скоростные характеристики выходят из одной точки, соответствующей току короткого замыкания двигателя Iк = U/∑Rа.
Механические характеристики п=f(М), приведенные на рис. 22.16, при тех же скоростях идеального холостого хода, что и скоростные характеристики, с осью абсцисс будут пересекаться в разных точках, так как при одном для всех характеристик токе короткого замыкания потоки и, следовательно, пусковые моменты будут различными. Если не учитывать влияние реакции якоря, то механические характеристики двигателей будут представлять собой прямые линии — сплошные на рис. 22.16.
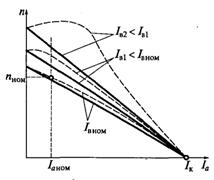
Рис. 22.15. Скоростные характеристики двигателей независимого (параллельного) возбуждения
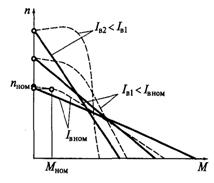
Рис. 22.16. Механические характеристики двигателей независимого (параллельного) возбуждения при изменении тока возбуждения
Из рис. 22.16 видно, что механические характеристики пересекаются между собой, поэтому при моментах сопротивления, лежащих правее точек пересечения, уменьшение магнитного потока будет вызывать не увеличение частоты вращения, а ее уменьшение. Следовательно, чем больше сопротивление цепи якоря ∑Rа, тем меньшим значениям момента будут соответствовать точки пересечения механических характеристик. У двигателей мощностью несколько киловатт и более точки
пересечения механических характеристик находятся вне рабочей зоны (где момент сопротивления больше номинального), поэтому в пределах рабочей зоны частота вращения с уменьшением магнитного потока возрастает. Уменьшение частоты вращения при ослаблении поля может наблюдаться только в машинах малой мощности.
На рис. 22.15 и 22.16 штриховыми линиями показаны соответственно скоростные и механические характеристики с учетом влияния размагничивающего действия реакции якоря. При малых токах возбуждения они могут иметь возрастающий характер, а работа двигателя при возрастающих характеристиках будет неустойчивой. Уменьшение магнитного потока из-за размагничивающего действия реакции якоря приводит также к уменьшению пускового момента.
Неустойчивая работа двигателя при малых токах возбуждения является одной из причин, ограничивающих верхний предел частоты вращения при этом способе регулирования. Другой причиной, ограничивающей максимальную частоту вращения двигателя, является ухудшение коммутации. Обычно дополнительные полюсы в машинах постоянного тока настраиваются на получение несколько ускоренной коммутации, поэтому значение коммутирующей ЭДС выбирается несколько большим, чем требуется для компенсации реактивной ЭДС. При повышении частоты вращения пропорционально увеличиваются коммутирующая и реактивная ЭДС, а следовательно, и их разность, которая при определенной частоте вращения может достигнуть недопустимого значения. В этом случае коммутация будет сильно ускоренной, появится ток разрыва и усилится искрение под щетками, т. е. нормальная работа машины будет невозможна. Кроме того, коммутация при высоких частотах вращения ухудшается вследствие повышения вибрации щеточного аппарата и увеличения максимального напряжения между соседними коллекторными пластинами из-за сильного искажения магнитного поля двигателя.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
