
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
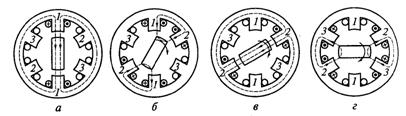
Рис. 17.10. Схемы, поясняющие принцип действия реактивного шагового двигателя с сосредоточенной обмоткой на статоре:
а – г – шаги ротора; 1 – 3 – обмотки статора
При подаче напряжения от блока управления на обмотку 1 статора ротор займет положение, при котором магнитное сопротивление потоку будет минимальным (см. рис. 17.10, а). Затем напряжение подается и на обмотку 2 статора таким образом, чтобы соседние его зубцы имели противоположную полярность, после чего ротор повернется на угол 30° и займет положение, показанное на рис. 17.10, б (первый шаг). Если напряжение с обмотки 1 снимется и питание останется только на обмотке 2, то ротор повернется еще на 30º и займет положение, показанное на рис. 17.9, в (второй шаг). Далее подключается обмотка 3, ротор поворачивается еще на 30° в положение, показанное на рис. 17.9, г (третий шаг), и т. д.
Из приведенного примера становится очевидным, что увеличить число шагов двигателя за один оборот можно одним из следующих способов:
увеличением числа зубцов (полюсов) ротора;
регулированием напряжений, подаваемых на работающие обмотки статора;
изготовлением статора из нескольких смещенных в пространстве (по углу) пакетов, располагаемых в одном корпусе.
В последнем случае ротор для всех пакетов статора должен быть общий.
Рабочие свойства ШД характеризуются следующими величинами:
шаг (угол);
предельная частота, при которой к началу следующего шага переходный процесс от предыдущего шага успевает закончиться;
частота приемистости, т. е. максимальная частота, при которой возможен пуск двигателя без выпадения ротора из синхронизма (без потери шагов).
17.5. Вентильные реактивные двигатели
Вентильный реактивный двигатель (ВРД) — это шаговый двигатель, работающий в режиме вращения, который можно отнести к классу реактивных или явнополюсных машин. Функциональная схема ВРД не отличается от функциональной схемы шагового двигателя, приведенной на рис. 17.9. Поскольку этот двигатель имеет непрерывное вращение, то входные импульсы должны нести информацию не о конечном (фиксированном) положении ротора, а о требуемой скорости или моменте. Вентильный реактивный двигатель, как и шаговый, относится к классу управляемых двигателей, которые могут работать только в замкнутых системах автоматизированного электропривода.
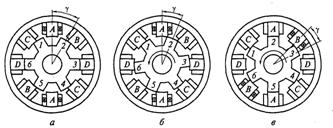
Рис. 17.11. Схемы, поясняющие принцип действия вентильного реактивного двигателя:
а – в – различные положения ротора; 1 – 3 – зубцы ротора
Рассмотрим принцип действия ВРД на примере четырехфазного двигателя с соотношением зубцов (полюсов) статора и ротора, равным 8/6. Предположим, что при взаимном расположении ротора и статора, соответствующем рис. 17.11, а, подано напряжение на фазу А. В силу того что в этом случае с осью фазы А совпадает поперечная ось ротора (угол рассогласования γ=90° электрических), ВРД находится в положении неустойчивого равновесия и не развивает электромагнитного момента. Такое взаимное положение ротора и статора называется рассогласованным.
Пусть по каким-то причинам ротор повернулся на некоторый угол против часовой стрелки и занял положение, показанное на рис. 17.11, б (угол рассогласования 0 < γ< 90° электрических). В этом положении возникает реактивный момент М, стремящийся повернуть ротор против часовой стрелки, чтобы с осью фазы А совпала продольная ось ротора. Если в этом случае не переключить напряжение на другую фазу, то электромагнитный момент при совпадении продольной оси ротора и оси фазы А (γ=0) станет равным нулю и ротор установится в положение устойчивого равновесия, характерное для шагового двигателя.
Так как в ВРД необходимо обеспечить непрерывное вращение ротора, при указанном на рис. 17.11, б положении (а реально несколько раньше), напряжение с фазы А переключается на фазу В, как показано на рис. 17.11, в. В этом положении двигатель развивает реактивный момент М, стремящийся повернуть ротор против часовой стрелки, чтобы его продольная ось совпала теперь уже с осью фазы В.
Далее последовательно включаются фазы C, D, A (обратной полярности) и т. д. Из рис, 17.11 видно, что для поддержания максимального электромагнитного момента необходимо осуществлять переключение фаз двигателя при определенном значении угла рассогласования γ, поскольку при γ = 0 и γ = 90° электрических градусов электромагнитный момент обращается в нуль. Для этого ВРД должен иметь датчик углового положения ротора, по сигналам которого и будут переключаться фазы обмотки статора.
Отметим одну характерную особенность ВРД, вытекающую из рассмотренного принципа его работы. Магнитное поле статора вращается по часовой стрелке от фазы А последовательно к фазам B, С, D, а ротор — по направлению момента М, показанному на рисунке стрелкой, т. е. против часовой стрелки. Поэтому, строго говоря, ВРД не может называться синхронным двигателем.
В силу простоты конструкции и управления приводы с ВРД получили широкое распространение за последние 25 лет, потеснив частотно-управляемые асинхронные электроприводы.
Контрольные вопросы
1. Каковы основные достоинства и недостатки синхронного реактивного двигателя?
2. Чем отличается асинхронный пуск двигателя с возбуждением от постоянных магнитов от пуска двигателя с электромагнитным возбуждением?
3. В чем состоит основное преимущество гистерезисного двигателя по сравнению с другими синхронными двигателями?
4. Поясните, как работает шаговый двигатель.
5. Как работает вентильный реактивный двигатель и чем он отличается от шагового двигателя?
РАЗДЕЛ V
МАШИНЫ ПОСТОЯННОГО ТОКА
ГЛАВА 18
КОНСТРУКЦИЯ И ПРИНЦИП РАБОТЫ МАШИН ПОСТОЯННОГО ТОКА
18.1. Принцип работы машин постоянного тока
В настоящее время наиболее широко применяются машины постоянного тока с механическим коммутатором — коллектором. Коллектор осложняет условия работы машины, но опыт эксплуатации в самых тяжелых условиях показал, что правильно спроектированная и качественно изготовленная машина постоянного тока является не менее надежной, чем более простые по конструкции машины переменного тока.
Машину постоянного тока можно рассматривать как обращенную синхронную машину, т. е. как машину, на статоре которой расположена цепь постоянного тока (индуктор), а на роторе — цепь переменного тока (якорь).
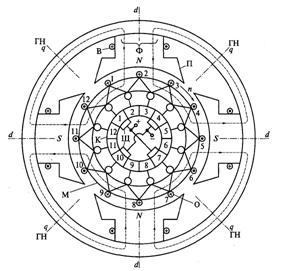
Рис. 18.1. Принципиальная схема машины постоянного тока с кольцевой обмоткой якоря
На рис. 18.1 схематично изображен поперечный разрез машины постоянного тока. На неподвижной части этой машины (статоре) размещаются полюсы (П) с обмотками возбуждения (В). При этом обмотки возбуждения соединены между собой таким образом, чтобы при прохождении по ним постоянного тока полюсы приобретали чередующуюся полярность (N, S, N, S и т. д.). Поток Ф, создаваемый обмотками возбуждения, не изменяется во времени и замыкается по контурам, показанным на рисунке штриховыми линиями. Как и в синхронных машинах, индуктор имеет две оси симметрии: продольную d и поперечную q.
На вращающейся части машины располагается обмотка якоря (О), в которой индуктируется основная ЭДС. Обмотка якоря наматывается вокруг полого шихтованного сердечника (М), закрепленного на валу машины (на рисунке не показан), и называется тороидальной. Все витки этой обмотки соединены последовательно.
Принципиальным отличием якорных обмоток машин постоянного тока является то, что они замкнуты сами на себя, т. е. конец последнего витка обмотки соединен с началом первого и, таким образом, у обмотки нет ни начала, ни конца.
Обмотка якоря имеет большое число секций, каждая из которых состоит из одного или нескольких витков.
Изображенный на рис. 18.1 якорь называется кольцевым. В настоящее время эти якори практически не применяются, так как ЭДС при такой конструкции индуктируется только в проводниках, расположенных на внешней поверхности сердечника якоря. В проводниках же, лежащих на внутренней поверхности якоря, ЭДС не наводится, потому что они не сцеплены с магнитным полем возбуждения. Однако в дальнейшем при изложении ряда физических процессов, происходящих в машинах постоянного тока, для большей наглядности будет рассматриваться именно такой якорь.
От обмотки якоря в таких машинах выполняются ответвления к пластинам коллектора (К), который располагается на валу якоря и представляет собой полый цилиндр, состоящий из электрически изолированных друг от друга медных пластин. Число коллекторных пластин равно числу секций обмотки якоря. Обмотка, показанная на рис. 18.1, состоит из 12 одновитковых секций, а коллектор соответственно — из 12 пластин.
При вращении ротора в направлении, показанном на рис. 18.1 стрелкой, в проводниках обмотки якоря индуктируется ЭДС, направление которой определяется по правилу правой руки и обозначено на рисунке точками и крестиками. При этом в обмотке якоря наводится переменная ЭДС, так как каждый проводник поочередно проходит полюсы разной полярности, что приводит к изменению знака (направления) ЭДС.
Если машина работает в режиме генератора, то переменная ЭДС обмотки выпрямляется с помощью коллектора, т. е. коллектор является в этом случае выпрямителем. С коллектором сопри-касаются неподвижные щетки (Щ), посредством которых обмотка якоря соединяется с внешней сетью.
Рассмотрим электрическую схему якорной цепи, соответствующую принципиальной схеме машины, приведенной на рис. 18.1. Из рис. 18.2 видно, что щетки делят обмотку якоря на параллельные ветви, поэтому ЭДС между щетками разной полярности определяется не разностью ЭДС между проводниками, с которыми щетки соединены электрически через коллекторные пластины (E1…4, E7…10), а равна ЭДС параллельной ветви обмотки якоря, т. е. сумме ЭДС секций, содержащихся в паралелльной ветви: Е1 + Е2 + Е3 или Е7 + Е8 + Е9.
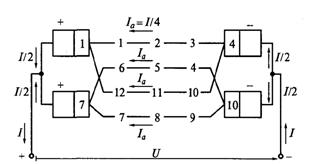
Рис. 18.2. Электрическая схема якорной цепи, соответствующая рис. 18.1
Следовательно, для получения максимальной ЭДС на выводах машины щетки надо устанавливать в тех местах, где ЭДС, наводимая в проводниках, меняет свое направление. Это происходит под серединой межполюсного промежутка, т. е. на поперечной оси q машины. Воображаемая линия, проведенная через середину межполюсного промежутка и совпадающая с поперечной осью машины, называется геометрической нейтралью (ГН). Значит, в машинах постоянного тока щетки должны быть установлены на геометрической нейтрали или поперечной оси. Поскольку число нейтралей равно числу пар полюсов, то число мест установки щеток равно числу полюсов.
При такой схеме установки щеток (см. рис. 18.1 и 18.2) между каждой их парой включены проводники обмотки якоря с одинаковым направлением ЭДС, Следовательно, щетки, соприкасающиеся с определенными коллекторными пластинами, будут иметь указанную на рисунках полярность. При вращении якоря расположение секций в пространстве и направление ЭДС в них будут меняться. Однако между коллекторными пластинами, с которыми соприкасаются неподвижные щетки, всегда будут располагаться проводники с одинаковым направлением ЭДС, и щетки будут иметь определенную полярность. При этом щетки одноименной полярности соединяются между собой, а к их общим выводам подключается внешняя сеть. При наличии коллектора во внешней сети генератора будет протекать постоянный ток, в то время как в обмотке якоря ЭДС и ток будут переменными. Направление тока в проводниках будет совпадать с направлением ЭДС.
Внутри обмотки якоря, которая замкнута сама на себя, сумма ЭДС равна нулю (см. рис. 18.1), поэтому при разомкнутой внешней цепи ток внутри обмотки якоря также будет равен нулю.
Если машина работает в режиме двигателя, то к щеткам подводится постоянный ток. Коллектор в этом случае преобразует постоянный ток внешней сети в переменный ток, протекающий по обмотке якоря, т. е. является инвертором.
Пусть направление тока в проводниках обмотки якоря соответствует показанному на рис, 18.1. Направление электромагнитных сил определяется по правилу левой руки, и, так как для всех проводников направление этих сил одинаковое (против часовой стрелки), создается суммарный вращающий момент. Наибольший вращающий момент получают при установке щеток на геометрической нейтрали (оси q), и под действием этого момента ротор двигателя начинает вращаться в направлении, противоположном указанному на рис. 18.1, (соответствующему генераторному режиму).
18.2. Конструкция машин постоянного тока
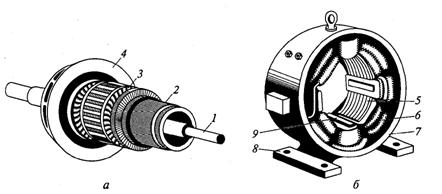
Рис. 18.3 Конструкция машины постоянного тока: а – ротор; б – статор; 1 – вал; 2 – коллектор; 3 – якорь; 4 – передний подшипниковый щит; 5 – главные полюсы; 6 – обмотка возбуждения; 7 – станина; 8 – лапа; 9 – дополнительный полюс
На рис. 18.3 показана конструкция машины постоянного тока. Статор такой машины состоит из станины 7 и прикрепленных к ней главных 5 и дополнительных полюсов. Станину машин относительно небольшой мощности изготовляют из отрезков цельнотянутых стальных труб, а станину мощных машин сваривают из толстолистового стального проката. Для закрепления машины на фундаменте или исполнительном механизме к нижней части станины приваривают лапы 8, а для транспортировки в нее ввертывают рым-болты.
На сердечниках главных полюсов размещают обмотку возбуждения 7, которую изготовляют в виде катушек из медных изолированных проводников круглого или прямоугольного сечения. Изолированные катушки насаживают на сердечник полюса и закрепляют стальными пружинящими рамками. Иногда для увеличения поверхности охлаждения катушку делят на две части. Полюс с надетой на него катушкой прикрепляют к станине болтами. Дополнительные полюсы располагают между главными полюсами и вместе с катушками их обмотки болтами прикрепляют к станине.
Ротор машины постоянного тока состоит из шихтованного сердечника якоря 3 с обмоткой и коллектора 2. Сердечник якоря и коллектор закреплены на валу 1. Сердечник собирается из изолированных листов электротехнической стали толщиной 0,5 мм для снижения потерь от вихревых токов. В листах якоря предусмотрены пазы для укладки его обмотки. Обмотку в пазах закрепляют клином или бандажами, располагаемыми в кольцевых канавках сердечника якоря. Лобовые части обмотки защищают от действия центробежных сил бандажами из проволоки или стеклоленты.
Станина 7, сердечники полюсов 5 и якоря 3 являются участками магнитопровода, по которым замыкается основной магнитный поток возбуждения. Для уменьшения магнитного сопротивления на пути этого потока все указанные участки выполняют из стали. С этой же целью стараются уменьшить воздушный зазор между якорем и полюсами. Из-за зубчатого строения якоря индукция в воздушном зазоре содержит высшие гармоники, которые будут наводить в полюсном наконечнике вихревые токи. Для их уменьшения полюсный наконечник и сердечник полюса также собирают из отдельных листов стали толщиной 1…2 мм.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
