
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
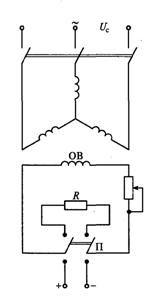
Рис. 16.8 Схема включения синхронного двигателя при асинхронном пуске
На рис. 16.8 показана схема включения синхронного двигателя при асинхронном пуске. В этом случае обмотка возбуждения (OВ) машины не должна быть разомкнутой, иначе из-за большого числа витков в ней вращающимся полем якоря при пуске (скольжении s=1) индуктировалась бы значительная ЭДС, которая могла бы привести к пробою изоляции этой обмотки. Однако обмотку возбуждения не следует замыкать накоротко, так как в этом случае в ней могут протекать значительные токи, приводящие к провалу пускового момента при s = 0,5.
Рассмотрим это явление подробнее. Так как обмотка возбуждения является однофазной, при пуске в ней наводится ЭДС с частотой f2= sf1, и протекают токи той же частоты. Пульсирующую МДС обмотки возбуждения можно разложить на две составляющие с половинной амплитудой, вращающиеся в противоположные стороны относительно ротора с одинаковой скоростью n2эл = sn1. Сам ротор при этом вращается по направлению поля якоря со скоростью n2мех = n1(1 - s).
Прямое поле ротора вращается по направлению поля якоря со скоростью
nпр= n2мех + n2эл = n1(1 - s)+ n1s= n1, (16.5)
т. е. оно неподвижно относительно поля якоря. Взаимодействие этих полей создает момент М1 прямой последовательности, имеющий ту же природу, что и обычный асинхронный момент, рассмотренный ранее.
Обратное поле ротора, вращающееся относительно статора со скоростью
nобр= n2мех - n2эл = n1(1 - s) - s n1= (1 - 2s)n1, (16.6)
индуцирует в нем ЭДС и замыкающиеся через сеть токи I12 с частотой
f2c= (1-2s)f1. (16.7)
Токи I12, замыкаясь через сеть, накладываются на токи прямой последовательности I11, имеющие частоту f1. Поскольку сеть является источником ЭДС с нулевым внутренним сопротивлением, то можно считать, что обмотка якоря по отношению к токам I12 замкнута накоротко. Взаимодействие обратных полей статора и ротора приводит к появлению электромагнитного момента, стремящегося повернуть статор по направлению вращения обратного поля.
При скольжениях 0,5 < s ≤ 1,0 в соответствии с выражением (16.6) nобр< 0, т. е. обратное поле ротора вращается по отношению к статору в сторону, противоположную направлению вращения основного поля и самого ротора. В эту же сторону направлен момент, действующий на статор. Момент M2, действующий на ротор, равен моменту, действующему на статор, и противоположно направлен. Таким образом, в данном диапазоне скольжений момент от обратного поля ротора совпадает по направлению с основным асинхронным моментом и усиливает его.
При скольжении s = 0,5 скорость вращения обратного поля ротора относительно статора побр = 0. При этом ЭДС, ток I12 и момент M2 также будут равны нулю.
При скольжениях s < 0,5 изменяется направление вращения обратного поля ротора по отношению к статору (побр > 0), что приводит к изменению знака момента М2 (он будет направлен против направления вращения ротора).
При скольжении s = 0 (при синхронной скорости) частота токов в роторе, ЭДС и ток в обмотке возбуждения равны нулю. Следовательно, будет равен нулю и момент M2 (см. кривую 2 на рис. 16.9).
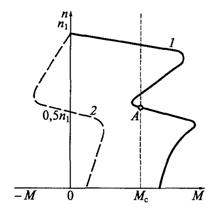
Рис. 16.9. Результирующая механическая характеристика (1) и механическая характеристика от обратного поля обмотки возбуждения (2) при асинхронном пуске синхронного двигателя
Результирующая механическая характеристика синхронного двигателя 1 при асинхронном пуске показана на рис. 16.9. Из рисунка видно, что двигатель в этом случае имеет вторую статически устойчивую область работы в зоне п = 0,5 n1, из-за чего ротор при пуске с моментом сопротивления Мс может не разогнаться до синхронной скорости, т. е. «застрять» на промежуточной частоте вращения (в точке А).
Следовательно, в начале пуска обмотка возбуждения (см. рис. 16.8) должна быть замкнута на резистор R, с сопротивлением, примерно в пять раз превышающим активное сопротивление самой обмотки. Это существенно уменьшает ток, протекающий по обмотке, момент М2 и провал момента на механической характеристике. По окончании пуска переключателем П обмотка возбуждения подключается к источнику постоянного тока.
Асинхронный пуск синхронного двигателя характеризуют следующие величины: пусковой ток (или его кратность); начальный пусковой момент Мп; момент входа в синхронизм Мвх, со- ответствующий асинхронному моменту при частоте вращения, равной 0,95n1 (см. рис. 16.7). Момент Мвх равен наибольшему моменту сопротивления, при котором возможно вхождение двигателя в синхронизм при подаче постоянного тока в обмотку возбуждения.
Если электрическая сеть не позволяет осуществить прямой асинхронный пуск, применяют пуск при пониженном напряжении (см. подразд. 11.4).
Частотный пуск применяют при наличии автономного источника питания, частоту напряжения которого можно изменять от нуля до номинальной. Если плавно повышать частоту питающего напряжения, то соответственно будет увеличиваться частота вращения магнитного поля. При этом ротор, следуя за магнитным полем, постепенно будет повышать свою частоту вращения от нуля до номинальной.
При этом способе двигатель во время пуска возбужден (т. е. обмотка возбуждения подключена к источнику постоянного тока), что позволяет осуществлять пуск при максимальном электромагнитном моменте и, следовательно, нагруженном приводимом механизме.
Пуск с помощью разгонного двигателя состоит в том, что посторонним (разгонным) двигателем ротор синхронной машины раскручивают до номинальной частоты вращения. Затем производят включение синхронной машины на параллельную работу с сетью методом точной синхронизации или самосинхронизации (см. подразд. 15.2). После синхронизации разгонный двигатель отсоединяют от вала синхронной машины, которая переходит в двигательный режим работы. Мощность разгонного двигателя составляет 10...20% номинальной мощности синхронного двигателя, что обеспечивает быстрый разгон последнего до синхронной скорости.
При этом способе пуск синхронного двигателя осуществляется без нагрузки (т. е. приводимый механизм должен быть разгружен).
16.5. Синхронные компенсаторы
Синхронные компенсаторы используются для поддержания заданного напряжения в узлах электрической сети посредством поддержания в ней баланса реактивных мощностей (генерируемой и потребляемой). В часы максимальных нагрузок синхронные компенсаторы работают как источники реактивной мощности, а в часы минимума нагрузок — как ее потребители. Кроме того, синхронные компенсаторы включают в конце линии электропередачи непосредственно у потребителя, так как, компенсируя частично или полностью реактивную составляющую тока, они уменьшают общий ток в линии и соответственно потери в ней.
По существу, синхронный компенсатор является синхронным двигателем, работающим при холостом ходе, т. е. без механической нагрузки на валу, и потребляет из сети активную мощность, равную его потерям. Для повышения экономичности работы в качестве охлаждающей среды для синхронных компенсаторов широко применяют водород, который имеет меньшую плотность по сравнению с воздухом, что приводит к снижению механических потерь.
Основной характеристикой синхронного компенсатора является U-образная характеристика, которая мало отличается от апатичной характеристики синхронного двигателя при холостом ходе (Р = 0), приведенной на рис. 16.5. Перевозбужденный синхронный компенсатор работает с током, опережающим напряжение сети, и отдает реактивную мощность в сеть. При недовозбуждении он работает с током, отстающим от напряжения сети, и потребляет реактивную мощность из сети.
Синхронные компенсаторы часто применяются для компенсации отстающего тока в сетях с большой индуктивной нагрузкой, которую обычно создают включенные в сеть асинхронные двигатели. Компенсаторы в этом случае работают с перевозбуждением.
В некоторых случаях синхронные компенсаторы работают с недовозбуждением. Необходимость в этом возникает, если ток в линии передачи содержит значительную опережающую составляющую, обусловленную ее емкостным сопротивлением. Это наблюдается при малой нагрузке (передаваемой мощности) линии электропередачи, т. е. когда отстающий по фазе ток нагрузки не компенсирует емкостную составляющую тока линии. В этом случае включение синхронных компенсаторов уменьшает перенапряжение в линии.
При перевозбуждении ток возбуждения синхронного компенсатора больше, чем при недовозбуждении, т. е. нагреваются эти компенсаторы больше при опережающем токе. Вследствие этого номинальная мощность синхронного компенсатора соответствует номинальному току якоря в режиме перевозбуждения. Синхронные компенсаторы имеют следующие конструктивные отличия от синхронных двигателей:
корпус компенсаторов может быть выполнен герметичным, так как они не имеют выходного конца вала;
вал компенсатора может иметь существенно меньший диаметр, чем вал двигателя, так как он не приводит в движение какой-либо механизм и момент, действующий на вал, незначителен;
так как компенсаторам не нужно иметь большой максимальный момент Мmах, он может быть снижен за счет уменьшения воздушного зазора между статором и ротором (т. е. за счет увеличения хd что, в свою очередь, способствует уменьшению размеров обмотки возбуждения. Все это обеспечивает меньшие габаритные размеры синхронных компенсаторов по сравнению с синхронными двигателями. Компенсаторы выпускаются мощностью от 2,8 до 320 МВ∙А, обычно в горизонтальном исполнении. Их номинальные напряжения составляют 6,3...20 кВ, а частота вращения равняется 750 или 1000 об/мин.
Контрольные вопросы
1. В чем заключается отличие двигательного режима синхронной машины от генераторного?
2. Какой характер имеет реакция якоря в синхронном двигателе при недовозбуждении и перевозбуждении?
3. Как в синхронном двигателе можно изменять максимальный момент?
4. Какой режим (перевозбуждения или недовозбуждения) является
расчетным и почему?
5. Назовите способы пуска синхронных двигателей и дайте их краткую характеристику.
6. Поясните порядок переключений обмотки возбуждения при асинхронном пуске синхронного двигателя.
7. Для чего используются синхронные компенсаторы?
8. В чем заключаются конструктивные отличия синхронных компенсаторов от синхронных двигателей?
ГЛАВА 17
СИНХРОННЫЕ МАШИНЫ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ
17.1. Синхронные реактивные двигатели
Синхронные реактивные двигатели (СРД) имеют явнополюсный ротор. Их основное преимущество по сравнению с обычными синхронными двигателями заключается в отсутствии обмотки возбуждения и, следовательно, щеточного контактного узла. Магнитный поток в такой машине создается только обмоткой якоря, а вращающий момент, образующийся вследствие явнополюсности ротора (хd ≠хq), равен реактивному моменту:
(17.1)
Как следует из формулы (17.1), максимальный вращающий момент имеет место при угле θ = 45° и чем больше различие между хd и хq, тем больший максимальный момент развивает двигатель.
Явнополюсный ротор всегда стремится занять по отношению к внешнему полю статора такое положение, при котором энергия магнитного поля будет минимальной. Это соответствует их взаимному положению, при котором магнитная проводимость потока максимальна, т. е. положению, когда ось внешнего поля совпадает с продольной осью ротора. Следовательно, постоянный синхронизирующий момент создается только при синхронной скорости вращения ротора, т. е. когда ротор и поле статора взаимно неподвижны.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
