
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
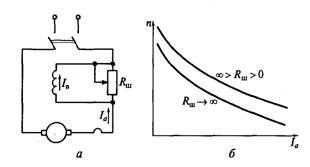
Рис. 22.17. Схема включения шунтирующего реостата Rш (а) и скоростные характеристики двигателя последовательного возбуждения (б) при изменении тока возбуждения
Изменение магнитного потока в двигателях последовательного возбуждения осуществляется шунтированием обмотки возбуждения с помощью реостата Rш (рис. 22.17, а). Чем меньше сопротивление Rш, тем меньше ток возбуждения Iв и магнитный поток Ф, а значит, больше частота вращения п. На рис. 22.17, б показаны естественная скоростная характеристика (Rш→∞) и одна из регулировочных характеристик (∞>Rш > 0) двигателя последовательного возбуждения.
Из-за ограничения максимальной скорости в двигателях нормального исполнения диапазон регулирования их частоты вращения путем изменения магнитного потока составляет (1,5…2,5) : 1. Тем не менее регулирование частоты вращения изменением магнитного потока является одним из наиболее простых и экономичных способов и поэтому находит широкое применение. Увеличение механических потерь при повышении частоты вращения двигателей приводит к некоторому уменьшению их КПД.
22.7. Способы торможения двигателей постоянного тока
Для того чтобы быстро остановить механизм, приводимый во вращение электродвигателем, или уменьшить его скорость наряду с механическими применяются и электрические способы. Сущность электрических способов торможения состоит в том, что электрическая машина в этот период из двигательного режима переводится в один из тормозных и, следовательно, создает электромагнитный момент, направленный против направления вращения.
В машинах постоянного тока применяют три способа электрического торможения: динамическое, рекуперативное и противовключением. При динамическом торможении машина работает в режиме автономного генератора, при рекуперативном — в режиме генератора, работающего параллельно с сетью, при торможении противовключением — в режиме электрического тормоза. Рассмотрим более подробно эти способы торможения.
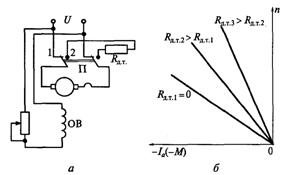
Рис. 22.18. Схема динамического торможения (а) и механические (скоростные) характеристики (б) двигателя параллельного (независимого) возбуждения в данном режиме
Динамическое торможение. В этом режиме цепь якоря двигателя замыкают на внешнее активное сопротивление Rд. т, для чего переключатель (П) из положения 1 переводят в положение 2 (рис. 22. 18, а). Так как обмотка параллельного (независимого) возбуждения на все время торможения остается включенной в сеть, а якорь по инерции продолжает вращаться в том же направлении, то ЭДС в обмотке якоря не изменяет свой знак. Ток якоря в исходном (двигательном) режиме Iа= (U – E)/∑Rа. После отключения якоря от сети (U= 0) и замыкания его на внешнее активное сопротивление Rд. т выражение для тока якоря можно записать в следующем виде:
Iа= – E/(∑Rа + Rд.т)= - c1nФ/(∑Rа + Rд.т),
электромагнитный момент
М =с Iа Ф=- c1nФ²/ c1 (∑Rа + Rд. т). (22.18)
Из выражения (22.18) видно, что электромагнитный момент М изменяет свой знак, т. е. становится тормозным. Выбор значения сопротивления Rд. т определяется ограничениями на значение тока якоря (см. подразд. 22.5). Если пренебречь размагничивающим действием реакции якоря, то из выражения (22.18) следует, что механические характеристики двигателя в режиме динамического торможения линейные и выходят из начала координат (рис. 22.18, 6).
Недостатком этого способа торможения является то, что при малых частотах вращения машина постоянного тока не развивает достаточного тормозного момента.
Рекуперативное торможение. Рекуперативное торможение происходит в том случае, когда в двигателе, подключенном к сети с напряжением U, скорость п превысит скорость идеального холостого хода n0и. При этом ЭДС обмотки якоря Е станет больше напряжения U и ток в якоре изменит свое направление. Машина перейдет в генераторный режим работы параллельно с сетью и будет создавать тормозной момент.
При рекуперативном торможении кинетическая энергия привода преобразуется в электрическую энергию, отдаваемую генератором постоянного тока в сеть. Этот способ торможения служит не для остановки привода, а для его подтормаживания, характерного для работы подъемных устройств при спуске груза и электрического транспорта при движении под уклон.
В двигателях последовательного возбуждения рекуперативное торможение осуществить невозможно, так как их скорость идеального холостого хода равна бесконечности и, следовательно, ЭДС не может быть больше приложенного напряжения. Если все же необходимо осуществить рекуперативное торможение в этих двигателях, их обмотку возбуждения переключают на питание от отдельного источника по схеме независимого возбуждения.
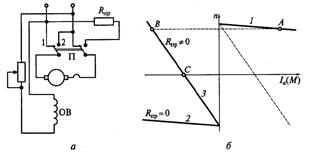
Рис. 22.19. Схема торможения противовключением (а) и три механические (скоростные) характеристики (б) двигателя параллельного (независимого) возбуждения в данном режиме
Торможение противовключением. Схема перевода двигателя в режим противовключения показана на рис. 22.19, а. В исходном состоянии переключатель (П) находится в положении 1 и цепь якоря подключена к напряжению сети U. Предположим, что двигатель работает в режиме, которому соответствует точка А механической (скоростной) характеристики 1, показанной на рис. 22.19, б. В этой точке частота вращения равна п, а ток якоря Iа = (U - E) /∑ Rа.
Для перехода в режим торможения противовключением изменяют полярность подводимого к якорю напряжения (переключатель П на рис. 22.19, а из положения 1 переводят в положение 2). После переключения вследствие механической инерции скорость п и ЭДС Е не изменяются ни по значению, ни по направлению. Если сопротивление противовключения Rпр =0, то ток якоря после переключения
Iа = -(U + E) /∑ Rа,
т. е. он примерно вдвое будет превышать ток при прямом пуске двигателя. Для ограничения тока в цепь якоря включают резистор Rпр, как и в случае реверсирования изменением полярности напряжения якоря. При этом новая механическая характеристика приобретает вид прямой 3 (см. рис. 22.19, б). Прямая 2 - это естественная механическая характеристика двигателя, соответствующая Rпр = 0.
При переводе переключателя в схеме из положения 1 в положение 2 машина из режима работы, соответствующего точке А, переходит в режим, соответствующий точке В на характеристике 3. При этом ток якоря изменяет свое направление и создаваемый им момент становится тормозным. Под действием этого момента скорость п будет уменьшаться до полной остановки машины (точка С). Если необходимо только остановить двигатель, то в момент, которому соответствует точка С на характеристике 3, машину следует отключить от сети, иначе она перейдет в двигательный режим и якорь начнет вращаться в противоположную сторону. Торможение противовключением может применяться во всех типах двигателей постоянного тока.
Контрольные вопросы
1. По какому признаку классифицируют двигатели постоянного тока?
2. Какие характеристики служат для оценки рабочих свойств двигателей?
3. Сопоставьте скоростные и моментные характеристики двигателей постоянного тока.
4. Какие способы уменьшения пускового тока применяются в двигателях постоянного тока?
5. В чем состоят особенности пуска двигателей параллельного возбуждения?
6. Какие меры предосторожности следует принимать при пуске двигателей последовательного возбуждения?
7. Как можно изменить направление вращения двигателя постоянного тока?
8. Какие способы регулирования частоты вращения применяются для двигателей постоянного тока?
1. Технология производства электрических машин / . — М.: Энергоатомиздат, 1993.
2. Электрические машины: учеб, пособие для вузов / . — М.: Изд-во МЭИ, 1978.
3. Иванов- В, Электрические машины: учебник для вузов / -Смоленский. — М.: Изд-во МЭИ, 2004.
4. Электрические машины: учебник для вузов / И. П. Копылов. — М.: Высш. шк.: Логос, 2000.
5. Электрические машины автоматических устройств : учеб, пособие для вузов/И. Л. Осин, . — М.: Изд-во МЭИ, 2003.
6. И, Современные асинхронные электрические машины. Новая Российская серия КА / , , . — М.:Знак, 1999.
7. Справочник по электрическим машинам: в 2 т. / под ред. И. П. Копылова, . — М.: Энергоатомиздат, 1988 — 1989.
8. Электрические машины: учеб, пособие для вузов / . — М.: Энергоатомиздат, 1990.
Предисловие ................................................................................................. 3
Введение ....................................................................................................... 4
РАЗДЕЛ I. ТРАНСФОРМАТОРЫ
Глава 1. Общие сведения............................................................................ 7
1.1. Материалы, применяемые в электромашиностроении........... 7
1.2. Роль трансформаторов в электроэнергетике............................ 10
1.3. Типы и классификация трансформаторов............................... 13
1.4. Конструкции трансформаторов ................................................ 14
Глава 2. Физические процессы в трансформаторах ................................. 17
2.1. Закон электромагнитной индукции.......................................... 17
2.2. Процессы, происходящие в однофазном трансформаторе
при холостом ходе ..................................................................... 18
2.3. Процессы, происходящие в однофазном трансформаторе
при нагрузке ..............................................................................22
2.4. Дифференциальные уравнения трансформатора..................... 25
2.5. Приведение вторичной обмотки трансформатора
к первичной ...............................................................................28
2.6. Основные уравнения и векторная диаграмма
трансформатора .........................................................................30
2.7. Схема замещения трансформатора........................................... 31
2.8. Учет потерь в стали ....................................................................33
ГлаваЗ. Характеристики трехфазных трансформаторов .........................37
3.1. Некоторые особенности схем и конструкций трехфазных
трансформаторов .......................................................................37
3.2. Определение характеристик холостого хода
трансформатора .........................................................................39
3.3. Определение характеристик короткого замыкания
трансформатора .........................................................................42
3.4. Изменение вторичного напряжения при нагрузке
трансформатора .........................................................................46
3.5. Потери мощности и КПД трансформатора............................. 50
3.6. Реактивная мощность в трансформаторе.................................53
Глав а 4. Работа трансформаторов в энергетических системах ...............56
4.1. Группы соединений обмоток трехфазных

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
