
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
22.3. Условия устойчивой работы двигателей постоянного тока
На практике важно, чтобы работа двигателя вместе с производственным механизмом протекала устойчиво. Под статически устойчивой работой двигателя понимается его способность вернуться в исходную точку равновесия после кратковременного действия возмущающих сил, нарушивших это равновесие. Оценка устойчивости производится путем совместного рассмотрения механических характеристик двигателя и приводимого им в движение производственного механизма.
Рассмотрим работу двигателя независимого возбуждения, механические характеристики которого могут быть как возрастающими, так и падающими (см. рис. 22.1).
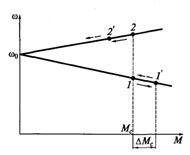
Рис. 22.7. К анализу устойчивости работы двигателя постоянного тока
Пусть момент сопротивления не зависит от скорости вращения, т. е. Мс = const. Тогда точки 1 и 2 (рис. 22.7) пересечения механических характеристик с моментом сопротивления будут являться точками равновесия моментов (М - Мс = 0) и соответствовать установившемуся режиму работы двигателя.
Теперь предположим, что момент сопротивления Мс скачком увеличился на ΔМс, и рассмотрим работу двигателя сначала в точке 1. В соответствии с уравнением движения (22.4) можно утверждать, что скорость двигателя скачком измениться не может, и тогда для точки 7 справедливо неравенство dω/dt<0. Иными словами, при увеличении момента сопротивления скорость двигателя будет уменьшаться, т. е. ее значение будет перемещаться на механической характеристике в сторону точки 1’.
Предположим, что при достижении точки 1’ характеристики момент сопротивления восстанавливает свое первоначальное значение Мс.
Так как скорость не может измениться скачком, для этой точки будет справедливо неравенство dω/dt>0 т. е. скорость двигателя начнет увеличиваться и ее значение на механической характеристике будет перемешаться в сторону точки 1. В этой точке М = Мс, и дальнейшего изменения скорости происходить не будет. Таким образом, после исчезновения возмущения двигатель возвращается в исходную точку работы. Следовательно, падающая механическая характеристика является статически устойчивой.
Условие устойчивой работы двигателя можно записать следующим образом:
dМ/dω <dМс/dω.
Теперь рассмотрим работу двигателя в точке 2. Как и в предыдущем случае, скорость двигателя скачком измениться не может, и тогда для точки 2 справедливо неравенство dω/dt < 0. Иными словами, при увеличении момента сопротивления скорость двигателя будет уменьшаться, т. е. ее значение на механической характеристике будет перемещаться в сторону точки 2'.
Предположим, что при достижении точки 2' характеристики момент сопротивления восстанавливает свое первоначальное значение Мс. В отличие от предыдущего случая в точке 2' момент сопротивления по-прежнему остается больше электромагнитного момента, а dω/dt < 0, что приводит к дальнейшему уменьшению скорости вращения двигателя (в направлении ω0). Следовательно, восходящая механическая характеристика является статически неустойчивой.
В современных высокоиспользуемых двигателях сильно проявляется размагничивающее действие реакции якоря и получить падающую механическую характеристику не удается. В этом случае для получения статически устойчивой характеристики на главных полюсах размещают дополнительно последовательную обмотку возбуждения, имеющую всего несколько витков и предназначенную только для компенсации размагничивающего действия реакции якоря. Эта обмотка называется стабилизирующей. При наличии такой обмотки магнитный поток двигателя практически не будет меняться (ΔФ ≈ 0) при изменении тока якоря, т. е. он будет стабилизирован, а механическая характеристика двигателя в этом случае будет падающей. Несмотря на то что такой двигатель имеет смешанное возбуждение, его называют двигателем параллельного (независимого) возбуждения со стабилизирующей обмоткой.
22.4. Способы и условия пуска двигателей постоянного тока
При пуске двигателя (n = 0) ЭДС, наводимая в обмотке якоря, равна нулю, а следовательно, в соответствии с уравнением (22.2) пусковой ток
Iaп =U/ ∑ Rа (22.15)
Поскольку сопротивление цепи якоря ∑ Rа невелико, то при пуске с номинальным напряжением (U=Uном) ток якоря в 10...50 раз будет превышать свое номинальное значение. Такой ток недопустим ни для щеток (из-за чрезмерных плотностей тока и сильного искрения под ними), ни для обмоток (из-за больших электродинамических усилий, пропорциональных квадрату тока якоря), ни для сети (из-за больших падений напряжения в ней). Кроме того, в соответствии с формулой (22.6), пропорционально росту тока увеличивается электромагнитный момент двигателя, что может привести к поломке узла, соединяющего вал двигателя и приводимого механизма. По условиям работы коллекторно-щеточного узла допустимый пусковой ток Iап< 2,5Iaном.
Таким образом, прямой пуск (прямое включение в сеть) допустим только для двигателей малой мощности с относительно большим сопротивлением цепи якоря. Пусковой ток более мощных двигателей необходимо уменьшать до указанных выше значений, что достигается снижением подводимого напряжения или включением последовательно с обмоткой якоря добавочного активного сопротивления (пускового реостата).
Пуск при пониженном напряжении можно осуществить, если двигатель подключен к отдельному регулируемому источнику постоянного тока. В этом случае напряжение источника плавно увеличивают при включении двигателя, что позволяет избежать больших толчков тока. Начальное напряжение при пуске должно обеспечивать в первый момент (n= 0) пусковой ток в цепи якоря Iап≤ 2,5Ia ном.
При использовании пускового реостата максимальное значение его сопротивления должно обеспечивать в первый момент пуска (п = 0) ток в цепи якоря Iап≤ 2,5Ia ном. По мере разгона двигателя растет наводимая в его обмотке ЭДС, вследствие чего ток якоря уменьшается, а следовательно, сопротивление пускового реостата также постепенно надо уменьшать. Когда частота вращения двигателя достигает установившегося значения, реостат выводят полностью (Rп = 0), поскольку по условиям охлаждения пусковые реостаты рассчитаны на кратковременное протекание тока. Этот способ пуска наиболее распространен.
Условия пуска двигателей независимого, параллельного и смешанного возбуждения. Первым условием является ограничение пускового тока одним из двух рассмотренных выше способов.
Второе условие вытекает из требования обеспечения минимального времени пуска, для чего, согласно уравнению движения, необходимо максимизировать пусковой момент. Увеличить же пусковой момент МП при ограниченном значении тока Iап можно, как следует из формулы (19.6), только за счет увеличения магнитного потока Ф. Следовательно, второе условие — это пуск при максимальном потоке возбуждения. Для этого при пуске обмотку возбуждения включают на полное напряжение сети и полностью выводят регулировочный реостат RВ (рис. 22.8).
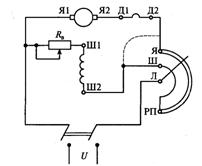
Рис. 22.8. Схема включения пускового реостата для пуска двигателя параллельного возбуждения:
Я, Ш, Л — выводы пускового реостата для подключения соответственно обмоток якоря, возбуждения и сети
Нельзя включать обмотку возбуждения так, как показано штриховой линией на рисунке, т. е. после пускового реостата (РП).
В начальный момент пуска напряжение, подводимое к двигателю, уравновешивается падением напряжения в цепи якоря и пусковом реостате. Так как сопротивление пускового реостата RП » ∑ Rа на цепь якоря и параллельную обмотку возбуждения будет приходиться небольшая часть напряжения сети (10...20 %), а значит, ток возбуждения и магнитный поток будут малы, что приведет к значительному снижению электромагнитного момента. При этом, если пуск производится с нагрузкой на валу, может оказаться, что Мп < Мс, и двигатель не придет во вращение. При пуске на холостом ходу (Мс ≈ 0) из-за малого магнитного потока будет сильно возрастать частота вращения двигателя, т. е. двигатель пойдет вразнос, что также недопустимо.
Условия пуска двигателя последовательного возбуждения. Первым условием также является ограничение пускового тока одним из двух рассмотренных ранее способов. При этом, если ограничение тока осуществляется с помощью пускового реостата, схема его включения будет проще приведенной на рис. 22.8, так как в этом случае используются всего два зажима: Л, к которому подключается один из сетевых зажимов, и Я, к которому подключается цепь якоря. Зажим Ш, к которому подключается параллельная обмотка возбуждения, здесь не потребуется.
Как следует из формулы (22.12), при заданном максимальном пусковом токе Iап пусковой момент становится максимально возможным, т. е. второе условие пуска двигателей независимого (параллельного) возбуждения в этом случае выполняется автоматически при соблюдении первого условия.
При пуске вхолостую ток якоря и, следовательно, магнитный поток по мере разгона двигателя будут уменьшаться и стремиться к нулю. В результате этого частота вращения двигателя будет сильно увеличиваться, т. е. двигатель пойдет вразнос. Следовательно, второе условие — это запрещение пуска двигателя без нагрузки. Обычно пуск можно проводить, если Мс ≥ (20…30 %) Мном.
22.5. Способы изменения направления вращения (реверсирования)
Направление вращения якоря двигателя постоянного тока в установившемся режиме работы совпадает с направлением электромагнитного момента, которое определяется по правилу левой руки. На рис. 22.9 направление тока в обмотке якоря показано точками и крестиками, а потока возбуждения Ф — стрелками.
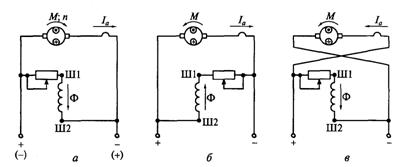
Рис. 22.9. Схемы включения обмоток двигателя в рабочем режиме (а) и при реверсировании посредством изменения направления тока возбуждения (б) и полярности напряжения, подводимого к цепи якоря (в):
Ш1, Ш2 — выводы обмотки параллельного возбуждения
На рис. 22.9, а при заданном направлении тока якоря и потока возбуждения электромагнитный момент и скорость двигателя направлены по часовой стрелке. Если поменять полярность подводимого напряжения, как указано в скобках, то ток якоря и поток возбуждения изменят свое направление, но направление момента и скорости останется тем же.
Направление момента и, следовательно, направление вращения якоря можно изменить, либо изменив направление магнитного потока при сохранении направления тока якоря, либо — направление тока в обмотке якоря при сохранении направления магнитного потока. Для этого необходимо поменять местами или выводы обмотки возбуждения (см. рис. 22.9, б), или полярность подводимого к цепи якоря напряжения (см. рис. 22.9, в).
При изменении направления магнитного потока в двигателях смешанного возбуждения, для того чтобы не нарушать согласное действие обмоток следует поменять между собой концы подводящих проводников как параллельной, так и последовательной обмотки.
В начальный момент реверсирования посредством изменения направления потока возбуждения скорость скачком измениться не может, однако ЭДС обмотки якоря изменяет свой знак. Следовательно, для этого момента времени уравнение равновесия (22.2) можно записать в виде
U=-E+ Iа ∑ Rа,
откуда начальное значение тока якоря при реверсировании
Iаp = (U+E) /∑ Rа, (22.16)
Из уравнения (22.16) следует, что ток Iаp ≈ 2Iап, поэтому для ограничения тока при реверсировании в цепь якоря необходимо включать реостат, сопротивление которого вдвое больше сопротивления пускового реостата. По мере уменьшения скорости вращения до нуля и далее при изменении направления вращения ЭДС будет уменьшаться, а затем изменять свой знак. Соответственно будет уменьшаться и ток якоря. Это позволяет уменьшать сопротивление реостата для сохранения максимально допустимого тока, т. е. для ускорения процесса реверсирования путем сохранения максимального электромагнитного момента.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
