
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Наиболее широкое распространение получили СРД с асинхронным пуском. Для этого на их роторе предусмотрена пусковая короткозамкнутая обмотка, как и в обычных синхронных двигателях. Статор СРД конструктивно не отличается от статора асинхронного двигателя.
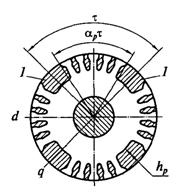
Рис. 17.1. Схема простого явнополюсного ротора четырехполюсного СРД:
1 – большие пазы
Конструкции ротора реактивных двигателей весьма разнообразны. До недавнего времени в основном применялся простой явнополюсный ротор, поперечный разрез которого показан на рис. 17.1. Явно выраженные полюсы в таком роторе получают вырубкой больших пазов 1 в межполюсном пространстве, а пусковую короткозамкнутую клетку — заливкой алюминием всех пазов (на рисунке они заштрихованы).
Наилучшее сочетание пусковых и рабочих свойств в таком Двигателе обеспечивает коэффициент полюсного перекрытиия αр= bр/τ = 0,5…0,6 при относительной высоте полюса hр/δ= 10…12. Однако даже при такой оптимальной геометрии ротора перегрузочная способность этих СРД составляет всего 1,2…1,5 при кратности пускового тока ki = 5…7, а мощность — около 40 % мощности асинхронного двигателя при равных габаритных размерах и суммарных потерях.
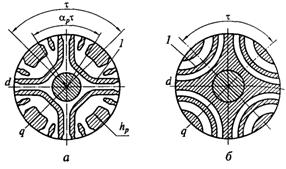
Рис. 17.2. Схемы усовершенствованных роторов четырехполюсного СРД:
а – с вутренними пазами; б – секционированный; 1 – дополнительные внутренние пазы
В настоящее время применяются усовершенствованные роторы СРД, в частности, с дополнительными внутренними пазами (рис. 17.2, a) и секционированные (рис. 17.2, б). Из рисунка видно, что у этих роторов существенно возрастает магнитное сопротивление потоку по поперечной оси, которое обеспечивает гораздо большую разницу между индуктивными сопротивлениями хd и хq без ухудшения пусковых свойств двигателя. Синхронные реактивные двигатели с такими роторами по своим энергетическим и массогабаритным показателям приближаются к асинхронным двигателям.
17.2. Синхронные двигатели с возбуждением от постоянных магнитов
Существуют синхронные двигатели, в которых для создания потока возбуждения вместо обмотки возбуждения применяют постоянные магниты, размещенные на роторе. В результате отпадает необходимость в контактных кольцах и машина становится бесконтактной. Синхронные машины с возбуждением от постоянных магнитов широко используются как в качестве генераторов, так и в качестве двигателей.
Преимуществами машин с возбуждением от постоянных магнитов являются простота конструкции, обусловленная отсутствием скользящих контактов и обмотки возбуждения, а также высокий КПД, обеспечиваемый благодаря отсутствию потерь на возбуждение и трение в скользящих контактах. Кроме того, такие машины не нуждаются в источнике постоянного тока для создания потока возбуждения.
Одним из главных показателей, используемых при проектировании данных машин, является степень возбужденности ε, равная отношению ЭДС холостого хода к напряжению сети:
ε = E10/U1.
Синхронные генераторы с постоянными магнитами рассчитаны на мощности, не превышающие нескольких десятков киловатт. Широкое распространение получили синхронные микродвигатели с возбуждением от постоянных магнитов и асинхронным пуском (СДПМ). Конструкция статоров таких машин аналогична конструкции статоров обычных машин переменного тока. При этом СДПМ подразделяют на два вида: с радиальным и аксиальным расположением на роторе постоянных магнитов и пусковой короткозамкнутой обмотки.
|

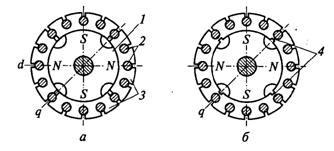
Рис. 17.3. Конструкция роторов СДПМ с радиальным расположением постоянных магнитов и пусковой обмоткой: а – со звездообразным магнитом; б – с мостиком насыщения; 1 – магнит; 2 – пазы; 3 – полюсные наконечники; 4 – мостики насыщения.
В СДПМ первого вида (рис. 17.3) магнит 1 имеет форму звездочки, на которую напрессовывают стальной кольцевой пакет с пазами 2 для стержней короткозамкнутой обмотки. В отличие от двигателей с электромагнитным возбуждением расстояние между соседними полюсными наконечниками 3 очень мало и представляет собой междуполюсные прорези (см. рис. 17.3, а), что обеспечивает увеличение магнитной проводимости рассеяния между полюсами ротора и предохраняет магниты от размагничивания при больших МДС обмотки якоря. Короткозамкнутая обмотка при такой конструкции ротора выполняется из меди и защищает постоянные магниты от размагничивания при пусках. Модификацией этой конструкции является ротор с насыщающимися мостиками 4 (см. рис, 17.3, б).
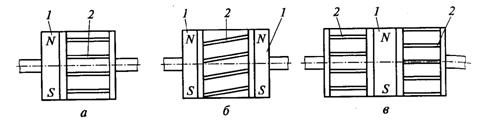
Рис. 17.4. Конструкция роторов СДПМ с аксиальным расположением постоянных магнитов и пусковой обмоткой: а – с одним торцевым магнитом; б – с двумя торцевыми магнитами; в – с двумя пусковыми клетками; 1 – постоянный магнит; 2 – пусковая клетка
В СДПМ второго вида (рис. 17.4) постоянные магниты 1 и пусковая клетка 2 располагаются вдоль вала ротора. При этом СДПМ имеет меньший диаметр по сравнению с радиальным расположением магнитов и пусковой обмотки. Достоинством аксиальной конструкции является ее технологичность, поскольку пусковая обмотка может выполняться литой, как в асинхронных двигателях, а не сварной, как в радиальных СДПМ.
Пуск СДПМ осуществляется непосредственным включением обмотки статора (якоря) в сеть. В отличие от обычных синхронных двигателей, которые во время пуска развозбуждены (см. подразд. 16.4), пуск СДПМ происходит при наличии потока возбуждения от постоянных магнитов. Этот поток в процессе пуска наводит в обмотке якоря ЭДС Е1в, изменяющуюся с частотой f1в=f1(1 - s). Под действием этой ЭДС по обмотке якоря начинает протекать ток I1в, имеющий частоту f1в, отличную от частоты сети f1. Сеть в этом режиме является источником ЭДС, т. е. имеет нулевое внутреннее сопротивление.
Таким образом, можно считать, что в пусковом режиме СДПМ как бы суммируются два режима:
асинхронный двигательный режим невозбужденной синхронной машины, питающейся от сети с напряжением U1 и частотой f1. В этом режиме в результате взаимодействия потока статора и токов пусковой обмотки развивается асинхронный момент MU;
генераторный (тормозной) режим возбужденной синхронной машины при переменной скорости вращения и сопротивлении нагрузки, равной нулю (сеть). В этом режиме в результате взаимодействия потока возбуждения ротора с токами I1в статора развивается тормозной момент Мв.
Следовательно, результирующий момент СДПМ в асинхронном режиме
Мас= MU + Мв. (17.2)
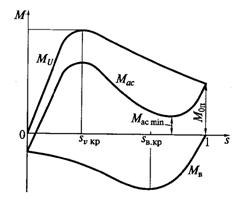
Рис. 17.5. Механическая характеристика СДПМ в пусковом режиме
Механическая характеристика СДПМ в процессе пуска представлена на рис. 17.5. Из этого рисунка видно, что пусковые свойства двигателя определяются не только соотношением, но и характером изменения двигательного и тормозного моментов. Тормозной момент обусловливает провал в пусковой характеристике и снижает крутизну результирующего момента Мас при скоростях, близких к синхронной. С одной стороны, для уменьшения провала момента, увеличения минимального пускового момента Мас min и обеспечения надежного пуска следует уменьшать тормозной момент МВ посредством уменьшения степени возбужденности двигателя ε.
С другой стороны, уменьшение степени возбужденности приводит к уменьшению максимального момента и перегрузочной способности СДПМ.
Таким образом, задача выбора степени возбужденности является комплексной и решается в процессе оптимизации характеристик двигателя.
17.3. Гистерезисные двигатели
Статор гистерезисных двигателей имеет такую же конструкцию, как статор машин переменного тока обычного исполнения. В пазах статора 1 размещается трехфазная или двухфазная обмотка 2, создающая вращающееся магнитное поде (рис. 17.6). Ротор двигателей состоит из двух частей: насаженной на вал 6 магнитной или немагнитной втулки 5 и закрепленного на ней с помощью запорного кольца 4 сплошного или шихтованного кольца 3, которое выполнено из магнитотвердого материала, имеющего широкую петлю гистерезиса (обычно из сплава викаллой).
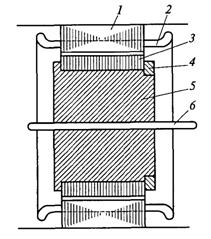
Рис. 17.6. Активная часть гистерезисного двигателя: 1 – статор; 2 – обмотка; 3,4 – кольца; 5 – втулка; 6 – вал
Гистерезисный двигатель может работать как в синхронном, так в асинхронном режиме. В асинхронном режиме его вращающий момент образуется в результате перемагничивания ротора и вклю-чает в себя две составляющие: асинхронный момент Мас, образующийся от вихревых токов, наводимых в кольце 3 полем статора, и гистерезисный момент Мг возникающий вследствие перемагничивания гистерезисного слоя ротора во вращающемся поле статора:
М= Мас + Мг.
Асинхронный момент Мас из-за большого активного сопротивления магнитотвердого материала достигает максимума при критических скольжениях sкр > 1, чем и отличается от момента обычного асинхронного двигателя.
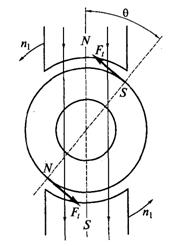
Рис. 17.7. Схема образования гистерезисного момента
Вследствие магнитного (гистерезисного) запаздывания ось наведенных полем статора полюсов ротора отстает от оси полюсов статора на угол θ (рис. 17.7). В результате возникает взаимодействие между указанными полями и появляется тангенциальная сила Ft создающая гистерезистый момент Мг. Поскольку угол θ для гистерезисного двигателя определяется только свойствами материала ротора, сила Ft и созданный ею момент Мг не зависят от частоты вращения ротора.
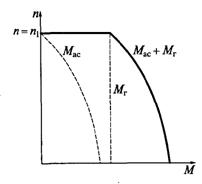
Рис. 17.8. Механическая характеристика гистерезисного двигателя в асинхронном режиме
На рис. 17.8 показана механическая характеристика гистерезисного двигателя в асинхронном режиме, который используется главным образом при пуске. Из рисунка видно, что гистерезисные двигатели обладают большим пусковым моментом, и это является их главным преимуществом.
В синхронном режиме ротор двигателя не перемагничивается и потери на гистерезис в нем отсутствуют. Чем шире петля гистерезиса материла, из которого изготовлен ротор, и больше его объем, тем больше создаваемый остаточный магнитный поток, а следовательно, больше вращающий момент Мг , развиваемый двигателем.
17.4. Шаговые двигатели
Шаговые двигатели (ШД) относятся к управляемым синхронным машинам, широко применяемым в системах автоматизированного электропривода. Это машины малой мощности, преобразующие импульсные электрические сигналы в пропорциональные числу этих сигналов дискретные (скачкообразные) угловые или линейные фиксированные перемещения (шаги) ротора.
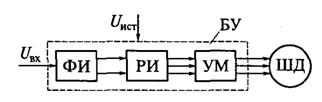
Рис. 17.9. Функциональная схема шагового двигателя
Функциональная схема ШД, представленная на рис. 17.9, состоит из формирователя импульсов (ФИ), распределителя импульсов (РИ) и усилителя мощности (УМ), входящих в блок управления (БУ), и самого шагового двигателя. Блок управления преобразует входной сигнал Uвх в многофазную систему напряжений, питающих обмотки ШД. Формирователь импульсов преобразует входные импульсы произвольной формы в прямоугольные импульсы необходимой длительности. Распределитель импульсов преобразует сформированные импульсы в многофазную систему напряжений, подаваемых после усиления на обмотки ШД. Электрическая энергия поступает в блок управления от постороннего источника Uист постоянного тока. По своему функциональному назначению блок управления является статическим преобразователем частоты.
В большинстве случаев ШД выполняются многофазными и многополюсными без пусковой обмотки на роторе. Роторы шаговых двигателей, имеющие явнополюсное исполнение, могут быть как активными (с обмоткой возбуждения или постоянными магнитами), так и пассивными (невозбужденными). На статоре шагового двигателя расположены одна или несколько обмоток управ-ления, которые могут быть сосредоточенными или распределенными. Питание этих обмоток осуществляется в определенной последовательности блоком управления.
Существуют разнообразные шаговые двигатели, принцип работы которых рассмотрим на примере реактивного (с пассивным ротором) шагового двигателя с сосредоточенной обмоткой на статоре (рис. 17.10). На статоре этого двигателя расположены три обмотки 1—3, каждая из которых состоит из двух катушек, размещенных на диаметрально противоположных зубцах (полюсах) статора. Ротор в рассматриваемом двигателе имеет два зубца (полюса), выполненных из магнитомягкого материала.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
