

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В случае q0» 1 ситуация в корне меняется. При неограниченном росте q0 требуемые pлт и рпс можно обеспечить, обрабатывая лишь один импульс. При этом потери за счет незнания его фазы невелики. Таким образом, некогерентная обработка сильных сигналов почти столь же эффективна, как и когерентная.
3.5. Обнаружение случайных сигналов
В радиоастрономии, радиоразведке, пассивной локации, биоэлектронике информация об источнике излучения либо каком-то явлении нередко связана с наличием или отсутствием в наблюдаемом колебании y(t) реализации некоторого полезного ожидаемого случайного процесса. При этом решают задачи обнаружения случайного сигнала, описываемого на языке n-мерных ПВ или функционала ПВ. Пусть в наблюдаемом колебании y(t) помимо белого шума n(t) может содержаться реализация некоррелированного с n(t) нормального процесса s(t) с нулевым средним к корреляционной функцией Ks(t, t + τ). Тогда при истинности гипотезы H1 процесс y(t)=s(t) + n(t) как сумма некоррелированных нормальных процессов будет также нормальным с корреляционной функцией Ky(t, t + τ), равной сумме корреляционных функций s(t) и n(t):
Ky(t, t + τ) = Ks(t, t + τ) + N0 δ(τ)/2 .
Правило достаточной статистики выглядит следующим образом
в котором ζп — порог, зависящий от избранного критерия, а
 (3.35)
(3.35)
Соотношение (3.35) определяет некоторое линейное преобразование y(t), осуществимое, например, с помощью линейного фильтра (в общем случае с переменными параметрами). Поэтому обнаружитель, реализующий правило (3.34), можно построить по схеме, показанной на рис. 3.12 и повторяющей структуру корреляционного приемника (см. рис. 3.1)
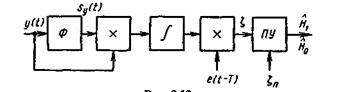
Рис.3.12. Структура обнаружителя случайного сигнала
с той лишь разницей, что опорный сигнал sy(t) теперь формируется не автономно, а из самого наблюдаемого колебания пропускаемого через линейный фильтр Ф.
3.6. Структуры и показатели различителей детерминированных сигналов
Предшествующий материал относился только к обнаружению, представляющему собой частный случай различения двух сигналов, один из которых равен нулю. В настоящем и следующем параграфах будет рассмотрено различение ненулевых сигналов одинаковой энергии. При этом за основу будет принято правило МП (2.10), оптимальное в том случае, когда критерием качества служит сумма условных вероятностей. ошибок pошусл, либо полная вероятность ошибки Рош при равных априорных вероятностях всех сигналов pi=l/M, либо средний риск (2.1) при равновероятности сигналов и равной опасности всех ошибок Пik = П, i ≠ k.
Различение двух детерминированных сигналов. Согласно (2.10), (2.17), действующий по правилу МП различитель двух детерминированных сигналов s0(t) и s1(t) равной энергии E0 = E1=E2 должен принимать решение о присутствии в колебании y(t) сигнала, имеющего с y(t) большую корреляцию:
![]()
 см.
см.
|
Рис.3.14. Структура устройства различения двух
детерменированных сигналов
Как всегда, коррелятор можно заменить фильтром, который должен быть согласованным с разностным сигналом s(t). Рассмотрим геометрическое толкование процедуры различения, проясняющее попутно вопросы о вероятностях ошибок и о том, как лучше выбрать сами различаемые сигналы. Будем интерпретировать s0(t) и s1(t) как векторы в некотором евклидовом пространстве, учтя, что длины последних в силу равенства энергий одинаковы. Так как в любом пространстве через два вектора с общим началом всегда проходит плоскость, векторы si(t) можно считать расположенными на плоскости. Допустим, что к присутствующему на входе различителя сигналу s0(t) добавилась помеха n(t), которую можно также интерпретировать как вектор, но уже не обязательно лежащий в плоскости Р. Тогда результирующий вектор y(t)=s0(t) + n(t) и решение будет выноситься в пользу сигнального вектора, ближайшего к y(t), т. е. имеющего меньшее евклидово расстояние
dyi = ![]() . Вероятность перепутывания уменьшается с ростом длины разностного вектора т. е. с увеличением евклидова расстояния между s0(t) и s1(t):
. Вероятность перепутывания уменьшается с ростом длины разностного вектора т. е. с увеличением евклидова расстояния между s0(t) и s1(t): ![]() , где ρ - коэффициент корреляции сигналов s0(t) и s1(t). Теперь выражение (3.40) можно представить в более традиционном виде:
, где ρ - коэффициент корреляции сигналов s0(t) и s1(t). Теперь выражение (3.40) можно представить в более традиционном виде:
![]()
где ![]() - известный параметр обнаружения, равный отношению сигнал/шум на выходе фильтра, согласованного с si(t), при гипотезе Hi.
- известный параметр обнаружения, равный отношению сигнал/шум на выходе фильтра, согласованного с si(t), при гипотезе Hi. ![]()
Вероятность ошибки минимальна для противоположных сигналов s1(t)=- s0(t), почему такая пара и считается оптимальной в любых приложениях, где требуется различение двух детерминированных сигналов равной энергии. Тем не менее, на практике по разным причинам нередко используют и неоптимальные, например ортогональные, сигналы, для которых р = 0 и 
Сравнивая выражение нетрудно видеть, что применение ортогональных сигналов вместо противоположных требует для сохранения значения Рош в √2 раз большего значения q, т. е. двукратного увеличения энергии сигналов Е. Поэтому в классе детерминированных сигналов ортогональная пара имеет энергетические потери по отношению к противоположной ξдБ = ЗдБ. Легко видеть, что противоположную пару образуют два радиосигнала, отличающиеся сдвигом на угол π фазы несущей частоты. Характерных примеров ортогональных пар значительно больше, и среди них такие, как два отрезка длительностью Т гармонического колебания частоты f=k/T (k-натуральное число), сдвинутые по фазе на угол π/2; любые два сигнала, не перекрывающиеся по времени или по спектру; разнообразные фазоманипулированные сигналы и пр.
Выводы по главе:
1. Универсальность гауссовско-марковской модели сообщения в не меньшей степени, чем вычислительная эффективность алгоритмов фильтрации типа калмановских, объясняет повсеместное применение последних в современной информационной технике.
Вопросы для самоконтроля:
Вопрос 1. В чем достоинство оценки по максимуму правдоподобия?
Вопрос 2. Какие из следующих параметров сигнала являются неэнергетическими: начальная фаза, центральная частота спектра, амплитуда, время запаздывания, длительность, девиация частоты, период повторения импульсов в пакете, индекс угловой модуляции?
Вопрос 3. Какой качественный смысл вкладывается в понятие ФН?
Вопрос 4. В чем принципиальное отличие априорной и апостериорной ПВ?
Вопрос 5. Каков смысл понятия «фильтрация параметров сигнала»?
Вопрос 6. Какую роль играют априорные сведения в задачах фильтрации?
Методические рекомендации.
Изучив материал главы, ответьте на вопросы. При возникновении трудностей обратитесь к материалам для закрепления знаний в конце пособия.
Для углубленного изучения воспользуйтесь литературой:
основной: 1 – 2; дополнительной: 4 – 6 и повторите основные определения, приведенные в конце пособия.
Глава 4. ОСНОВЫ ТЕОРИИ ИЗМЕРЕНИЯ ПАРАМЕТРОВ СИГНАЛОВ РАДИОТЕХНИЧЕСКИХ СИСТЕМ
4.1. Содержание и классификация задач измерения параметров сигналов
Как отмечалось в гл. 1, сигнал, поступающий на приемную сторону информационной РТС, несет существенную для получателя (пользователя, абонента, потребителя РТС) информацию, содержащуюся в значениях тех или иных параметров: амплитуды, частоты, фазы, времени запаздывания, углов прихода и поворота плоскости поляризации радиоволн и др. Так, в обычном телевизионном вещании адресованное абоненту сообщение заключено в значениях амплитуды (канал изображения) и частоты (канал звукового сопровождения) сигнала. В радиолокации и радионавигации сведения о координатах и скоростях объектов содержатся во времени запаздывания, фазе, частоте и направлении прихода колебаний. В системах цифровой связи и цифрового вещания параметром, несущим полезную информацию, является номер переданного сигнала и т. п. Очевидно, пользователю для извлечения из полученного сигнала нужных сведений следует выяснить (определить, измерить) значения параметров сигнала, несущих требуемую информацию. Эти значения параметров не обязательно точно воспроизведут истинные, так как в реальных условиях полезный сигнал поступает на приемную сторону только в смеси с помехами. Кроме того, на измерения может существенно влиять наличие у сигнала не только полезных (несущих необходимую информацию) параметров, но и параметров, не известных потребителю и не содержащих интересных для него сведений. Например, в радиолокационных дальномерах сантиметрового диапазона информация о дальности от РЛС до цели заключена во времени запаздывания отраженного радиоимпульса, тогда как амплитуда и фаза последнего данных о дальности практически не содержат, случайно меняясь от зондирования к зондированию вследствие фединга. Полезные параметры сигнала, содержащие нужную абоненту информацию, будем называть информационными, остальные неизвестные параметры - мешающими (неинформационными, несущественными, паразитными, нежелательными). Заметим, что такая классификация параметров для каждого конкретного случая своя. Так, в стандартном телевизионном канале изображения именно амплитуда служит информационным параметром, время запаздывания же сигнала никакой информации для пользователя не несет; в интерферометрах радиопеленгаторов полезными параметрами оказываются фазы колебаний, принятых разнесенными антеннами, и т. д.
Формализованной моделью измерения параметров сигнала является следующее положение. Пусть на интервале времени [0, Т] присутствует колебание y(t), образованное как продукт описываемого детерминированным оператором F[ •] взаимодействия сигнала s(t; υ(t), ψ(t)) с помехами x(t):

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
