

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 Рис. 6.1. Основные методы определения местоположения объекта
Рис. 6.1. Основные методы определения местоположения объекта
В первом случае пеленгование объекта осуществляют с Земли и при необходимости измеренное значение пеленга передают на объект (борт) по каналу связи. При расположении радиопеленгатора на объекте пеленг на радиомаяк измеряют непосредственно на борту.
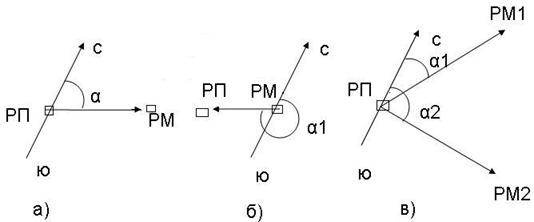
Рис. 6.2. Принцип работы методов определения местоположения объекта, РМ - радиомаяк; РП – радиопеленгатор; α – угол; с – ю –направление север-юг
В радиомаячной системе (рис. 6.2,б) используют радиомаяк с направленной антенной и ненаправленный приемник. В этом случае в месте расположения приемника измеряют обратный пеленг α0 относительно нулевого направления, проходящего через точку, в которой расположен радиомаяк. Часто применяют маяк с вращающейся ДНА. В момент совпадения оси ДНА с нулевым направлением (например, северным) вторая, ненаправленная, антенна РМ излучает специальный нулевой (северный) сигнал, который принимается приемником системы и является началом отсчета углов. Фиксируя момент совпадения оси вращающейся ДНА маяка с направлением на приемник (например, по максимуму сигнала), можно найти обратный пеленг α0, который при равномерном вращении ДНА маяка пропорционален промежутку времени между приемом нулевого сигнала и сигнала в момент пеленга. В этом случае приемник упрощается, что важно при его расположении на борту. Поверхностью положения угломерной РНС является вертикальная плоскость, проходящая через линию пеленга. При использовании наземных РП и РМ линией положения будет ортодромия - дуга большого круга, проходящего через пункты расположения РП и РМ. Она является линией пересечения поверхности положения с поверхностью Земли. Истинный пеленг (ИП) - угол между меридианом и ортодромией. При расстояниях, малых по сравнению с радиусом Земли, ортодромия аппроксимируется отрезком прямой линии. Для определения местоположения РП (рис.6.2.,в) необходим второй РМ. По двум пеленгам α1и α2 можно найти местоположение РП как точку пересечения двух линий положения (двух ортодромий на земной поверхности). Если система расположена - в пространстве, то для определения местоположения РП необходим третий радиомаяк. Каждая пара (РП - РМ) позволяет найти лишь поверхность положения, которая будет в данном случае плоскостью. При определении местоположения приемника предполагают, что координаты РМ известны.
В морской и воздушной навигации вводят понятие курса - угла между продольной осью корабля (проекцией продольной оси самолета на поверхность Земли) и направлением начала отсчета углов, в качестве которого выбирают географический или магнитный меридиан, а также линию ортодромии. Соответственно такому выбору различают истинный, магнитный и ортодромический курсы. Для летательного аппарата (ЛА) в качестве третьей координаты при нахождении местоположения используют высоту полета h - абсолютную (отсчитываемую от уровня Балтийского моря), барометрическую (отсчитываемую по барометрическому высотомеру относительно уровня, принятого за нулевой) и истинную (кратчайшее расстояние по вертикали до поверхности под ЛА, измеряемое радиовысотомером). При применении радиовысотомера местоположение ЛА определяется уже комбинацией угломерного и дальномерного методов измерения координат.
Далномерный метод. Этот метод основан на измерении расстояния D между точками излучения и приема сигнала по времени его распространения между этими точками. В радионавигации дальномеры работают с активным ответным сигналом, излучаемым антенной передатчика ответчика (рис. 4.3, а) при приеме запросного сигнала. Если время распространения сигналов запроса τз, и ответа τо одинаково, а время формирования ответного сигнала в ответчике пренебрежимо мало, то измеряемая запросчиком (радиодальномером) дальность D = с(τз + τо)/2. В качестве ответного может быть использован также и отраженный сигнал, что и делается при измерении дальности РЛС до отражателя или высоты радиовысотомером. Поверхностью положения дальномерной системы является поверхность шара радиусом D. Линиями положения на фиксированной плоскости либо сфере (например, на поверхности Земли) будут окружности, поэтому иногда дальномерные системы называют круговыми. При этом местоположение объекта определяется как точка пересечения двух линий положения. Так как окружности пересекаются в двух точках (рис. 6.3,б), то возникает двузначность отсчета, для исключения которой применяют дополнительные средства ориентирования, точность которых может быть невысокой, но достаточной для достоверного выбора одной из двух точек пересечения. Поскольку измерение времени задержки сигнала может производиться с малыми погрешностями, дальномерные РНС позволяют найти координаты с высокой точностью. Радиодальномерные методы начали применяться позже угломерных. Первые образцы радиодальномеров, основанные на фазовых измерениях временной задержки, были разработаны в СССР под руководством , и в 1935-1937 гг. Импульсный метод измерения дальности был применен в импульсной РЛС, разработанной в 1936-1937гг. под руководством .
Разностно-дальномерный метод. С помощью приемоиндикатора, расположенного на борту объекта, определяют разность времени приема сигналов от передатчиков двух опорных станций: А и В. Станцию А называют ведущей, так как с помощью ее сигналов осуществляется синхронизация работы ведомой станции В. Измерение разности расстояний, пропорциональной временному сдвигу сигналов от станции А и В, позволяет найти лишь поверхность положения, соответствующую этой разности и имеющую форму гиперболоида. Если приемоиндикатор и станции А и В расположены на поверхности Земли, то измерение ∆D = DB — DA позволяет получить линию положения на земной поверхности в виде гиперболы с ∆D = const. Для двух станций можно построить семейство гипербол с фокусами в точках расположения станций А и В. Расстояние между станциями называют базой. Для заданной базы семейство гипербол наносят на карту заранее и оцифровывают. Однако одна пара станций позволяет определить лишь линию положения, на которой расположен объект. Для нахождения его местоположения необходима вторая пара станций (рис. 6.4), база которой d2 должна быть расположена под углом к базе d1 первой пары. Обычно ведущая станция А является общей и синхронизирует работу обеих ведомых станций В1 и В2. Сетка линий положения такой системы образуется двумя семействами пересекающихся гипербол, позволяющих найти местоположение приемоиндикатора (ПИ), расположенного на борту объекта.
Точность разностно-дальномерной системы выше точности угломерной и приближается к точности дальномерной. Но основным ее преимуществом является неограниченная пропускная способность, так как наземные станции могут обслуживать неограниченное число ПИ, находящихся в пределах дальности действия системы, поскольку на борту определяющегося объекта нет необходимости иметь передатчик, как в дальномерной системе. Следует заметить, что асимптотами гипербол являются прямые линии, проходящие через центр базы каждой пары станций системы. Таким образом, на расстояниях, в несколько раз превышающих длину базы, линии положения вырождаются в прямые, в результате чего разностно-дальномерная система может быть использована как угломерная.
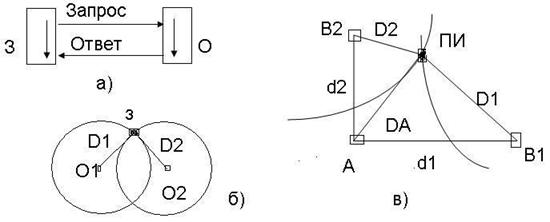
Рис. 6.3. Методы: а – дальномерный с активным ответом; б - по двум дальностям; в – разностно-дальномерный
В зависимости от видов сигналов наземных станций и метода измерения временного сдвига сигналов принимаемых ПИ различают импульсные, фазовые и импульсно-фазовые разностно-дальномерные РНС.
Принцип импульсной разностно-дальномерной системы был предложен советским инженером в 1938 г., но широкое распространение такие системы получили лишь к концу второй мировой войны, когда были разработаны методы точного измерения временного положения импульсов. Первая фазовая разностно-дальномерная система (фазовый зонд) была создана в СССР в 1938 г. В дальнейшем этот принцип был использован в системах «Декка», «Координатор» и др.
Комбинированный угломерно-дальномерный метод. Этот метод позволяет найти местоположение объекта из одной точки. Комбинированный метод обычно применяют в РЛС, которые измеряют наклонную дальность D, азимут а и угол места β. Углом места называют угол между направлением на объект и горизонтальной плоскостью (поверхностью Земли). Азимут отсчитывают от направления север - юг или другого направления, принятого за начальное. Путем пересчета основных координат D, α и β можно найти также высоту h, горизонтальную дальность Dг и ее проекции на направление север - юг и запад - восток. Определение местоположения объекта из одной точки и с помощью одной станции является большим преимуществом комбинированного метода, который широко используется также в радиосистемах ближней навигации.
Рассмотренные методы определения местоположения объекта относительно точек с известными координатами (радионавигационные точки РНТ) с помощью поверхностей и линий положения называют позиционными. Кроме позиционных методов в навигации применяют методы счисления пути интегрированием измеренных скорости (доплеровским или воздушным измерителем) или ускорения (акселерометром), а также обзорно-сравнительные методы, основанные на сравнении телевизионных, радиолокационных и других изображений местности с соответствующими картами. Используют и корреляционно-экстремальные методы навигации, основанные на определении структуры какого-либо физического поля, характерного для данной местности (например, рельефа), и сравнении параметров этого поля с соответствующими параметрами, хранящимися в запоминающем устройстве РНС. Преимуществами этих методов являются автономность, малое влияние помех и отсутствие накапливающихся погрешностей при определении местоположения объекта.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
