

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
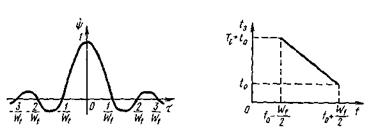
Для простого радиоимпульса без внутриимпульсной модуляции отводы линии задержки должны быть расположены равномерно. С каждого отвода снимается частотно-модулированный импульc. Сигналы с отводов линии задержки суммируются. Расположение отводов подобрано так, чтобы в момент окончания импульсов на выходе линии задержки происходило суммирование всех положительных полупериодов. Амплитуда результирующего колебания в другие моменты времени близка к нулю. Длительность выходного импульса существенно меньше длительности входного.
|
Корреляционная функция или отклик СФ имеет вид
 .
.
Фазоманипулированный сигнал. Кроме плавного изменения частоты сигнала, как это бывает в случае ЛЧМ, также возможно изменение фазы сигнала. Технически проще реализуется дискретное изменение фазы. Такой сигнал называется фазоманипулироваанным. Наибольшее распространение получила фазовая манипуляция по равномерным кодам (Хэмминга, Баркера и др.). Таким образом, радиоимпульс с фазовой манипуляцией представляет собой дискретный сигнал, обычно с прямоугольной огибающей, фаза которого в дискретные моменты времени скачком меняет свое значение по определенному коду. Пример такого сигнала приведен на рис. 5.5а, а закон манипуляции – на рис. 5.5б. В верхней части рис. 5.5 приведена структурная схема фильтра, согласованного с указанным сигналом. Фильтр построен на основе линии задержки с отводами. В цепи отводов помещены усилители с единичным коэффициентом усиления, но с инверсией или без нее. Знаки коэффициентов усиления - импульсная характеристика фильтра - устанавливаются зеркальными относительно сигнала. Таким образом, К1 =1, К2= -1, К3=1, К4=1. Здесь единица означает усиление без инверсии, минус единица – усиление с инверсией. Для четырехэлементного кода импульс укорачивается в 4 раза. Использование такого фильтра позволяет работать при мощности шума, превышающей мощность сигнала на входе в 2-3 раза. На выходе такого звена обычно ставят фильтр, согласованный с одиночным элементарным радиоимпульсом.

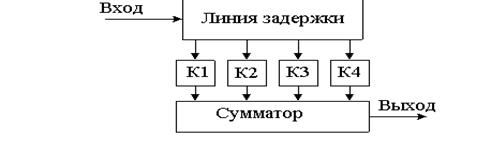
Рис. 5.5. Принцип работы СФ фазоманипулированного сигнала
5.5. Разрешение по времени запаздывания и частоте.
|
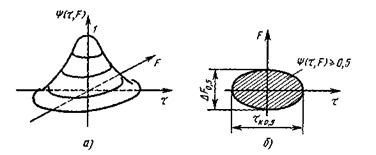
В локационных системах интерферирующие на входе приемника сигналы, отраженные различными целями, обычно отличаются друг от друга не только временем запаздывания, но и доплеровскими сдвигами, В таких случаях, характерных и для других приложений (радионавигация, связь по многолучевым трассам и др.), приходится говорить о разрешении сигналов по времени запаздывания τ и по частоте F, т. е. по двумерному векторному параметру υ, компонентами которого служат τ и F: υ = (τ, F)T. Качество разрешения при этом определяется видом частотно-временной ФН. Геометрически ψ (τ, F) задает некоторую поверхность над координатной плоскостью τ, F, причем в начале координат τ = 0, F=0 высота этой поверхности фиксирована и равна единице: ψ (0, 0) = 1 (рис. 5.6, а).
Рис. 5.6. Вид функции неопределенности и её сечения
Две копии сигнала, сдвинутые друг относительно друга по времени запаздывания на τ и по частоте на F, разрешить тем легче, чем ниже уровень ФН (5.20) при данных τ, F, т. е. чем меньше высота поверхности на рис. 6.10, а в точке с координатами τ, F.
 (5.1.)
(5.1.)
Таким образом, желательно, чтобы ФН ψ(τ, F) как можно быстрее спадала по мере удаления точки τ, F от начала координат. Нужно отметить, что сечение ФН плоскостью F=0, как следует из (5.20), есть ФН по запаздыванию ψ (τ) и, следовательно, протяженность ψ (τ, 0) по оси τ характеризует достижимую для данного сигнала разрешающую способность только по времени запаздывания (т. е. возможность разрешения двух копий сигнала, имеющих разное время запаздывания, но одинаковые частоты). Аналогично, протяженность вдоль оси F сечения ψ (0, F) ФН (5.1) плоскостью τ = 0 определяет разрешающую способность только по частоте (когда разрешаемые копии сигнала совмещены по времени, но отличаются частотами).
|
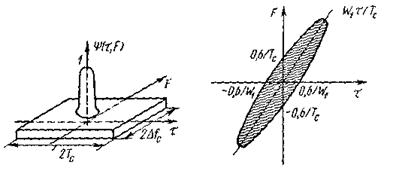
Рис. 5.7. Функция неопределенности и сечение сложных сигналов
Возвращаясь к вопросу о предпочтительной форме частотно-временной ФН (о предпочтительном теле неопределенности), можно утверждать, что для получения хорошей разрешающей способности по τ и F тело неопределенности должно иметь пик в начале координат (основной пик) по возможности малого объема Vосн. Оставшийся объем V - Vосн, приходящийся на боковые лепестки, для минимизации уровня последних следует распределить как можно более равномерным слоем по прямоугольнику со сторонами 2TС, 2∆FС. Таким образом, идеальная ФН должна иметь «кнопочный» вид—типа иголки единичной высоты на прямоугольном пьедестале площади 4∆FС TС (рис. 5.7 слева).
Теперь понятно, что приближение к идеальной форме ФН вида рис. 6.11 возможно лишь в классе сложных сигналов. Действительно, для таких сигналов характерна малая по сравнению с длительностью сигнала TС длительность корреляционной функции τк=1/∆fС, т. е. длина отрезка оси τ внутри области высокой корреляции τк 0.5=1/∆fС. Длина же отрезка оси F в пределах той же области—ширина спектра квадрата действительной огибающей ∆F0.5—для сложных сигналов та же, что и для простых ∆F0.5.=1/ TС. Таким образом, если площадь области высокой корреляции близка к произведению длин указанных отрезков, т. е. объем основного пика (его высота равна единице, а площадь основания близка к площади области высокой корреляции) Vосн = 1/B, при большой базе объем Vосн составит малую долю полного объема V= 1 и последний практически весь придется на пьедестал, площадь которого 4B значительно больше единицы. Средний квадрат уровня боковых лепестков ФН можно найти разделив объем пьедестала 1 — Vосн на площадь его основания. Так как Vосн « l, то среднеквадратический уровень боковых лепестков ψ(τ, F) примерно равен l/(2√B), т. е. уменьшения боковых лепестков частотно-временной ФН можно добиться только за счет увеличения базы сигнала.
Отыскание конкретных законов модуляции, отвечающих приемлемым ФН составляет предмет серьезной самостоятельной задачи и само по себе большое значение базы В еще не гарантирует близости ФН к идеальной. Так, если обратиться к ЛЧМ-сигналам, то выяснится, что для них ψ(τ, F) имеет вид не иглы на пьедестале, а узкого длинного гребня, повернутого относительно осей τ, F. Это подтверждает и диаграмма неопределенности такого сигнала (рис. 6.11). Отрезки осей τ и F в пределах этой области имеют длины 1,2/Wf и 1,2/Tс.
Таким образом, надлежащим выбором девиации Wf (ширины спектра) и длительности Тс можно добиться высокой разрешающей способности по времени запаздывания (при нулевой взаимной частотной расстройке интерферирующих сигналов) или по частоте (интерферирующие копии полностью совмещены по времени). В то же время, какими бы ни были значения Wf и Тс, копии сигнала, сдвинутые по τ на ∆τ (|∆τ |< Tс) и по F на ∆F=Wf∆τ/Tc, будут, как видно из рис. 6.11, иметь столь высокую корреляцию, что их следует считать практически неразрешимыми.
Более похожую на «кнопочную» ФН Т (т., F) имеют многие фазоманипулированные сигналы. Для них область высокой корреляции, как и для простых сигналов, симметрична относительно осей τ, F, однако размер ее вдоль оси τ примерно в B=N раз меньше Tc: τK=Tc/N. Поэтому, выбрав Tc и N достаточно большими, основному пику всегда можно придать иглообразную форму. При этом, однако, вместо изображенного на рис. 5.7. «гладкого» пьедестала высоты l/(2√N) вне основного пика оказываются хаотически расставленными острые боковые пики, отдельные из которых могут иметь уровни, заметно превосходящие l/(√N).
Выводы по главе:
1. Таким образом, надлежащим выбором девиации Wf (ширины спектра) и длительности Тс можно добиться высокой разрешающей способности по времени запаздывания (при нулевой взаимной частотной расстройке интерферирующих сигналов) или по частоте (интерферирующие копии полностью совмещены по времени).
2. Сигналы с большими базами в отличие от упомянутых ранее простых (имеющих τк одного порядка с Тс, а следовательно, ∆fс одного порядка с 1/Tс) называют сложными (широкополосными либо шумоподобными).
Вопросы для самоконтроля:
Вопрос 1. Дайте определение функции неопределенности.
Вопрос 2. Приведите классификацию сигналов.
Вопрос 3. Приведите вид кнопочной ФН.
Методические рекомендации.
Изучив материал главы, ответьте на вопросы.
При возникновении трудностей обратитесь к материалам для закрепления знаний в конце пособия.
Для углубленного изучения воспользуйтесь литературой:
основной: 1 – 6; дополнительной: 7 – 12 и повторите основные определения, приведенные в конце пособия.
ГЛАВА 6. ОСНОВНЫЕ ПРИНЦИПЫ ПОСТРОЕНИЯ рАДИОЛОКАЦИОННЫХ И РАДИОНАВИГАЦИОННЫХ СИСТЕМ
6.1. Основные понятия и определения
Радиолокацией называют область науки и техники, объединяющую методы и средства обнаружения, измерения координат и параметров движения, а также определения свойств и характеристик различных объектов (радиолокационных целей), основанных на использовании радиоволн, излучаемых, ретранслируемых либо отражаемых (рассеиваемых) этими объектами. Процесс обнаружения объектов, измерения их координат и параметров движения называют радиолокационным наблюдением (иногда радиолокацией цели), а используемые для этого системы - радиолокационными станциями (РЛС) или радиолокаторами, радарами.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
