

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Вопросы для самоконтроля:
Вопрос 1. В чем различие между пассивными и активными радиопомехами?
Вопрос 2. Какими факторами определяется эффективность защиты?
Вопрос 3. Какие существуют методы защиты РТС?
Вопрос 4. Какие факторы определяют скрытность действия РТС?
Методические рекомендации.
Изучив материал главы, ответьте на вопросы. При возникновении трудностей обратитесь к материалам для закрепления знаний в конце пособия. Для углубленного изучения воспользуйтесь литературой:
основной: 1 – 2; дополнительной: 4 – 6 и повторите основные определения, приведенные в конце пособия.
ГЛАВА 11. НАВИГАЦИОННЫЕ КОМПЛЕКСЫ САМОЛЕТОВ И СУДОВ
Под навигационным комплексом понимают совокупность бортовых измерительных средств и вычислителей, позволяющих определять местоположение и скорость самолета (судна) относительно Земли Ни один из существующих навигационных измерителей не может полностью решить эти задачи, так как каждый из них в отдельности не обеспечивает необходимой точности, помехозащищенности или надежности
Задачи, решаемые навигационным комплексом, многообразны Среди них одной из важнейших является счисление пути, обеспечивающее непрерывное измерение координаты объекта Основным недостатком систем счисления является ухудшение точности определения координат с увеличением времени работы Поэтому для получения требуемой точности счислимые координаты необходимо непрерывно или периодически корректировать на основании информации, поступающей от радиотехнических измерителей, т. е. осуществлять комплексную обработку данных. Структурная схема типового навигационного комплекса самолета приведена на рис 22.20 [13] Основу этого комплекса составляет инерциальная навигационная система (ИНС) на гиростабилизированной платформе. Она измеряет как угловое положение самолета (углы крена, тангажа, рыскания и их производные), так и составляющие ускорения и скорости. Скорость самолета измеряется также с помощью ДИСС и датчика воздушной скорости, входящего в состав системы воздушных сигналов (СВС). В качестве вспомогательного измерителя курса используется система курсовертикали (СКВ). Высота и скорость ее изменения измеряются с помощью радиовысотомеров (РВ). Сигналы этих устройств обрабатываются в вычислительном устройстве, являющемся частью распределенной бортовой вычислительной системы. В качестве систем коррекции координат местоположения самолета используются данные радиотехнических систем ближней (РСБН) и дальней (РСДН) навигации (таких, как «Омега», «Лоран-С» или системы с использованием ИСЗ), бортовых ЕЛС, корреляционно-экстремальных систем, а также данные, получаемые с выхода других измерителей, например астрономических ориентиров, оптических или электронно-оптических визиров.
В навигационных комплексах с более высокой степенью интеграции оборудования используются обратные связи (показаны на рис. 11.1 пунктирными линиями). За счет этих связей обеспечиваются коррекция положения гироплат-формы ИНС, предварительная настройка ДИСС по данным датчика воздушной скорости или ИНС, установка визиров в предполагаемое местоположение ориентиров и т. п. Так как системы, входящие в навигационный комплекс, определяют навигационные параметры в собственной системе координат, в алгоритмах навигационного вычислительного устройства предусмотрена процедура пересчета данных этих систем в основную систему координат, в которой осуществляется счисление пути.
Навигационный комплекс является составной частью пилотажно-навигационного комплекса (ПНК), который включает в себя также систему автоматического управления самолетом и систему индикации и отображения пилотаж-но-навигационной информации. ПНК предназначен для навигации и пилотирования самолета на всех этапах полета. В круг задач, решаемых ПНК, помимо непрерывного определения координат местоположения самолета, счисления пути и его коррекции входят программирование маршрута полета, вычисление и передача в САУ управляющих сигналов, выдача информации системам отображения и индикации, автоматический контроль исправности бортовых устройств и систем ПНК, а также автоматическая стабилизация и управление самолетом во всех режимах полета.
Навигационные комплексы морских судов имеют схожую структуру. На рис. 11.2 приведена структурная схема интегрированного навигационного комплекса «Data Bridge» норвежской фирмы «Norcontrol» , предназначенного для автоматизации судовождения и предотвращения столкновений. Счисление пути в этом комплексе осуществляется по данным лага и гирокомпаса. В качестве систем коррекции координат местоположения используются навигационные системы Декка (непрерывная коррекция в условиях прибрежного плавания), «Омега» , «Лоран-С», а также спутниковая навигационная система «Транзит». В бортовой ЭВМ реализуются соответствующие алгоритмы преобразования координат и комплексной обработки информации всех навигационных датчиков, а также вырабатываются необходимые сигналы для систем автоматического управления движением судна и системы индикации и отображения обстановки в районе плавания. В систему индикации вводится и радиолокационное изображение, полученное судовой РЛС.
Рис. 11.1. Структура навигационных комплексов ЛА
|

|
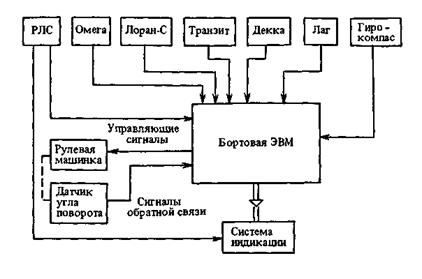
Рис. 11.2. Структура навигационных комплексов морских судов
Спутниковые РНС см. рис. 11.3 будут рассмотрены в 13. главе.
Рис. 11.3. Принцип работы и состав спутниковой РНС
ГЛАВА 12. Основные типы современных и перспективных радиолокационных средств
12.1. Комплекс разведки и управления "зоопарк-1"
Автоматизированный многофункциональный комплекс разведки и управления огнем артиллерии "Зоопарк-1", разработанный НИИ "Стрела" (г. Тула), предназначен для определения координат огневых позиций противника (стреляющих минометов, артиллерии, реактивных систем залпового огня и тактических ракет) по выстрелу (пуску) и на основании полученных данных осуществлять управление огнем собственных средств противодействия (рис.12.1 и табл. 12.1.).
В состав комплекса "Зоопарк-1" входят:
• радиолокационная станция 1Л259 на шасси МТ-ЛБу;
• машина технического обслуживания 1ИЗО на базе автомобиля Урал;
• электростанция ЭДЗО-Т230П-1РПМ на прицепе 2-ПН-2.
Табл. 12.1.
Основные тактико-технические характеристики
Приборная дальность обнаружения цели, км | до 45 |
Срединная ошибка определения координат, м | 30 |
Количество одновременно сопровождаемых целей, шт. | до 12 |
Пропускная способность, целей/мин | до 18 |
Сектор сканирования луча антенны, град. • по азимуту • по углу места | 60 40 |
Расчет комплекса (РЛС), чел. | 5 (3) |
Время развертывания комплекса, мин | 5 |
Комплекс обеспечивает с вероятностью 0,8 по первому выстрелу разведку стреляющих систем противника на дальностях, км: По минометам: • калибра 120 мм • калибра 81 мм | 15 12 |
РЛС представляет собой трехкоординатную моноимпульсную РЛС с фазированной антенной решеткой (ФАР), которая работает совместно с быстродействующей цифровой вычислительной системой, имеющей развитое программное обеспечение (рис.12.2). Обзор пространства при поиске целей осуществляется путем дискретного сканирования луча в секторе 60°х1,8° в режиме разведки и в секторе 16°х1,8° в режиме контроля стрельбы при постоянном угле места 40°. Аппаратура станции способна автоматически обнаруживать летящие мины, снаряды и ракеты, осуществлять их сопровождение, во время которого ведутся траекторные измерения. По их результатам производится решение дифференциальных уравнений движения снарядов, распознается класс стреляющих систем, определяются координаты огневых позиций с точностью, достаточной для эффективного ведения контрбатарейной борьбы (режим разведки), и рассчитываются точки падения средств поражения (режим контроля). Одновременно производится формирование и передача формализованных сообщений с данными об огневых позициях, а также результатах стрельбы средств поражения на командный пункт артиллерийского дивизиона и в автоматизированные ракетные комплексы.
В составе РЛС имеется система навигации, топопривязки и ориентирования. Она дает возможность автономно определять как на стоянке, так и на марше координаты и азимут продольной оси станции и, кроме того, осуществлять ее привязку к единой системе координат.
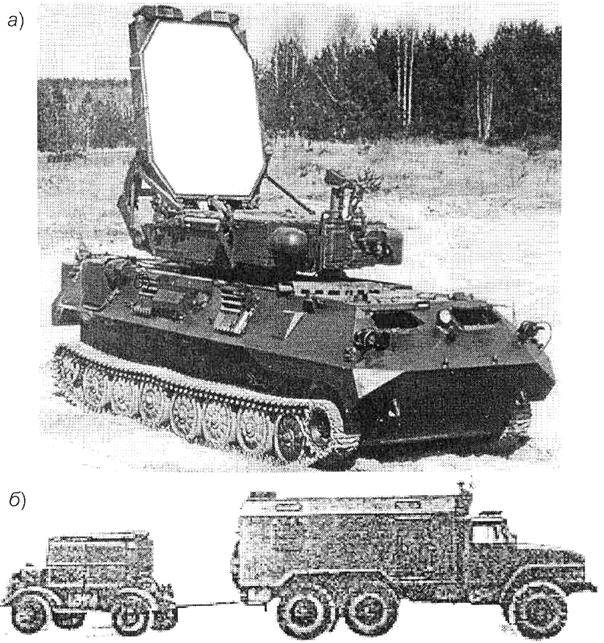
Рис. 12.1. РЛС
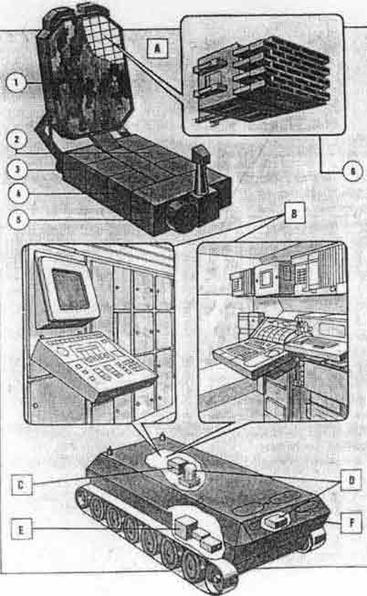
Рис.12.2. РЛС 1Л259: А – антенная система: 1 – ФАР (3320 антенных элемента, объединенных в 104 подрешетки), 2 – устройство управления амплитудно-фазовым распределением, 3 – система электропитания ФАР, 4 –приемная система, 5 – передающая система, 6 –подрешетка ФАР; В – системы обработки, управления и индикации, С – системы связи и передачи информации, D – системы навигации, топопривязки и ориентирования,
Е – система электропитания РЛС, F – многоцелевой легкий бронированный транспортер-тягач
При необходимости комплекс может быть использован для управления полетом беспилотных летательных аппаратов, а также ведения контроля за движением летательных аппаратов всех типов в зоне аэродрома. При этом РЛС, расположенная на аэродроме, обеспечит сопровождение и точное определение текущих координат летательных аппаратов, находящихся в зоне ответственности станции, а также передачу полученных данных на пункт управления в реальном масштабе времени.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
