

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Определяющее влияние на алгоритмы формирования ![]() (t) имеет вид зависимости s(t; υ(t)) в (4.69) от υ(t). Если это линейная функция υ(t), т. е. зависимость подчиняется принципу суперпозиции, и можно записать s(t; υ(t))=H(t)υ(t), где Н(t)—некоторая Nxr-матрица, элементы которой могут зависеть от времени t, но не от υ(t), то фильтрацию параметра υ(t) называют линейной. В остальных случаях фильтрацию называют нелинейной.
(t) имеет вид зависимости s(t; υ(t)) в (4.69) от υ(t). Если это линейная функция υ(t), т. е. зависимость подчиняется принципу суперпозиции, и можно записать s(t; υ(t))=H(t)υ(t), где Н(t)—некоторая Nxr-матрица, элементы которой могут зависеть от времени t, но не от υ(t), то фильтрацию параметра υ(t) называют линейной. В остальных случаях фильтрацию называют нелинейной.
Наряду с непрерывной фильтрацией, осуществляемой при непрерывном наблюдении у(t), можно рассматривать и дискретную фильтрацию или фильтрацию последовательностей, когда наблюдения доступны лишь в отдельные моменты времени ti. Тогда вместо (4.19) используют уравнение наблюдения
yi = si(υi) + хi. (4.20)
Уравнением сообщения называют
yi = hi υi + ni
υi =bi υi-1 + υi (4.21)
При дискретной фильтрации целью является оценка i-го элемента υ(t), последовательности υi, по наблюдениям уi. Главной проблемой изучаемой области статистической теории РТС является оптимальная фильтрация, т. е. отыскание наилучших в некотором смысле правил формирования текущей оценки υ(t). При этом за основу может быть принят байесовский подход, общие положения которого без затруднений переносятся со случая неизменного в течение наблюдений параметра на рассматриваемый случай.
Из нормальности апостериорной ПВ на (i - 1)-м шаге следует нормальность ее на i-м, что при допущении нормальности υ0 индуктивно доказывает нормальность апостериорной ПВ для любого i. Вспомним, что при квадратичной или простой функциях потерь оптимальными (байесовскими) оценками являются оценки по центру тяжести (апостериорному среднему) либо по правилу МАВ. Но для нормальной апостериорной ПВ среднее и мода совпадают. Следовательно, в качестве оптимальной оценки скалярного измеряемого параметра при линейной фильтрации независимо от функции потерь следует брать апостериорное среднее.
Соотношения
 (4.22) — (4.24)
(4.22) — (4.24)
Эти соотношения называются уравнениями фильтра Калмана. Как следует из (4.22), располагая оценкой на предыдущем шаге, фильтр Калмана, основываясь на уравнении сообщения (4.21) прогнозирует оценочное значение bi![]() i-1 на i-и шаг.
i-1 на i-и шаг.
|
По получении i-го наблюдения уi,- прогнозированная оценка подправляется на значение, пропорциональное невязке (обновляющему процессу), т. е. отклонению прогнозированного слагаемого hibi![]() i-1 i-го наблюдения в (4.21) от полученного отсчета уi. Коэффициент пропорциональности, регулирующий вес новых данных (невязки) в υi по сравнению с прогнозом bi
i-1 i-го наблюдения в (4.21) от полученного отсчета уi. Коэффициент пропорциональности, регулирующий вес новых данных (невязки) в υi по сравнению с прогнозом bi ![]() i-1 называют коэффициентом усиления фильтра Калмана. Эта величина помимо коэффициента hi в уравнении наблюдения и дисперсии шума наблюдения Kni определяется еще и апостериорной дисперсией Кυ i параметра υi. Последняя совпадает с квадратом разности оценки
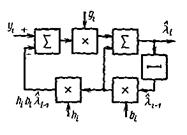
i-1 называют коэффициентом усиления фильтра Калмана. Эта величина помимо коэффициента hi в уравнении наблюдения и дисперсии шума наблюдения Kni определяется еще и апостериорной дисперсией Кυ i параметра υi. Последняя совпадает с квадратом разности оценки ![]() i и истинного значения υi, усредненным по всем возможным шумам наблюдения, и, таким образом, характеризует точность оценки на i-м шаге. Действия, выполняемые фильтром Калмана, иллюстрируются схемой рис. 4.10, в которой элемент задержки осуществляет запоминание предыдущей, (i-1)-й, оценки до следующего, i-го, шага.
i и истинного значения υi, усредненным по всем возможным шумам наблюдения, и, таким образом, характеризует точность оценки на i-м шаге. Действия, выполняемые фильтром Калмана, иллюстрируются схемой рис. 4.10, в которой элемент задержки осуществляет запоминание предыдущей, (i-1)-й, оценки до следующего, i-го, шага.
Рис.4.10. Фильтр Калмана
Рисунок, как и поясняемый им рекуррентный (разностный) алгоритм (4.22) - (4.24), показывает, что фильтр Калмана является характерным примером линейной дискретной замкнутой астатической системы регулирования с переменными параметрами. Ее чувствительный элемент (дискриминатор) вырабатывает сигнал рассогласования (невязку) входных данных уi и данных, поступающих по цепи обратной связи hibi![]() i-1 . После взвешивания рассогласование суммируется с ранее накопленным результатом, что эквивалентно введению в замкнутый контур интегратора, исключающего статическую ошибку.
i-1 . После взвешивания рассогласование суммируется с ранее накопленным результатом, что эквивалентно введению в замкнутый контур интегратора, исключающего статическую ошибку.
Приведенные рассуждения позволяют понять и алгоритм фильтра Калмана для векторного параметра при векторных наблюдениях.
Техника его вывода не отличается принципиально от использованной ранее, а итогом служат соотношения, которые формально можно получить из (4.85) — (4.87), заменив скаляры соответствующими векторно-матричными аналогами ![]() i, yi,hi, bi, а дисперсии Kvi, Kni, Kυi - корреляционными матрицами Kvi, Kni,Kυi последняя из которых характеризует точность фильтрации векторного параметра υi (4.88)
i, yi,hi, bi, а дисперсии Kvi, Kni, Kυi - корреляционными матрицами Kvi, Kni,Kυi последняя из которых характеризует точность фильтрации векторного параметра υi (4.88)
 (4.25) - (4.27)
(4.25) - (4.27)
где Gi — матрица размера r x. N, являющаяся матричным коэффициентом усиления фильтра Калмана.
Суть алгоритма (4.25) - (4.27) осталась прежней; экстраполированная с предыдущего шага оценка после получения i-го наблюдения уi,- корректируется с учетом новой информации, заключенной в невязке уi - HiBi![]() i-1, вклад которой в
i-1, вклад которой в ![]() i определяется матричным коэффициентом усиления Gi.
i определяется матричным коэффициентом усиления Gi.
Пошаговый (рекуррентный) характер алгоритма Калмана, позволяющий получать текущую оценку корректировкой ее предыдущего значения с учетом только очередного (i-го) наблюдения, удобен для реализации на ЭВМ, особенно при необходимости фильтрации в реальном времени, т. е. по мере поступления данных. Подчеркнем, что коэффициенты усиления gi, Gi в (4.22), (4.25), как и характеристики точности оценок Kυi и Kυi, не зависят от входных данных и могут быть рассчитаны заранее для всех значений i и занесены в память ЭВМ, с тем чтобы извлекаться оттуда по мере надобности. Кроме того, на практике нередко приемлемы те или иные упрощения алгоритма Калмана, как, например, замена переменных коэффициентов усиления gi и Gi в (4.22), (4.25) некоторыми не зависящими от i, т. е. переход к квазиоптимальным фильтрам с постоянными параметрами.
Диапазон применений алгоритма Калмана в современных информационных системах чрезвычайно широк. Хотя для доказательства его оптимальности при байесовском подходе пришлось оговорить нормальность помехи, он обладает определенными оптимальными свойствами и по отношению к любым аддитивным помехам. Оказывается, что формируемая им текущая оценка наиболее близка в смысле среднеквадратического отклонения к истинному значению параметра по сравнению с прочими линейными (полученными только линейными преобразованиями наблюдений) оценками. Кроме того, алгоритм Калмана можно усложнить, приспособив и к задачам нелинейной фильтрации.
Выводы по главе:
1. Диапазон применений алгоритма Калмана в современных информационных системах чрезвычайно широк. Хотя для доказательства его оптимальности при байесовском подходе пришлось оговорить нормальность помехи, он обладает определенными оптимальными свойствами и по отношению к любым аддитивным помехам.
Вопросы для самоконтроля:
Вопрос 1. В чем достоинство фильтра Калмана?
Вопрос 2. Поясните уравнение наблюдения?
Вопрос 3. Приведите границу Крамера-Рао?
Вопрос 4. Перечислите основные свойства ОМП.
Вопрос 5. Какие функции потерь используются?
Методические рекомендации.
Изучив материал главы, ответьте на вопросы. При возникновении трудностей обратитесь к материалам для закрепления знаний в конце пособия.
Для углубленного изучения воспользуйтесь литературой:
основной: 1 – 2; дополнительной: 4 – 12 и повторите основные определения, приведенные в конце пособия.
Глава 5. РАЗРЕШЕНИЕ СИГНАЛОВ
5.1. Понятия разрешающей спососбности
|
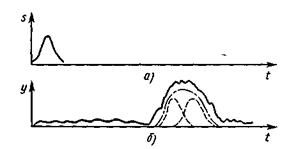
Как известно, в активных радиолокаторах решение о наличии цели в данном секторе пространства выносится в том случае, когда при зондировании (облучении) этого сектора приемник локатора улавливает эхосигнал, отраженный целью. При этом время запаздывания и доплеровский сдвиг эхосигнала относительно зондирующего сигнала содержат сведения о расстоянии до цели и ее радиальной скорости, а положение нормали к фронту отраженной целью волны - о ее угловых координатах. Предположим, что на каком-то зондируемом направлении оказались две близко расположенные цели. Тогда разность времен запаздывания соответствующих им эхосигналов (пунктир на рис. 5.1,б) относительно зондирующего сигнала s (t) (рис. 5.1, а) может оказаться меньше длительности последнего, так что эхосигналы наложатся друг на друга, образовав суперпозицию (штрихпунктир на рис. 5.1,б).
Рис.5.1. Маскирующие свойства наложения
Поскольку названная суперпозиция искажается шумом, неизбежно сопутствующим приему, в результирующем колебании y(t) (сплошная линия на рис. 5.1,б) довольно трудно «разглядеть» присутствие именно двух сигналов, а не одного. При большем числе накладывающихся эхосигналов отмеченная трудность усугубляется. Таким образом, определение числа сигналов в наблюдаемой реализации и измерение параметров каждого из них при перекрытии сигналов существенно сложнее, чем в том случае, когда индивидуальные эхосигналы в достаточной мере разнесены по времени запаздывания. В этом и состоит проблема разрешения по запаздыванию, т. е. выделения полезной информации, заключенной в каждом из наложившихся сигналов, отличающихся друг от друга временем запаздывания. Можно ввести понятие разрешения сигналов по углу (направлению прихода), с которым приходится иметь дело в локаторах, просматривающих заданный сектор с помощью последовательно перемещающегося в пространстве (сканирующего) луча: эхосигналы от двух целей, расположенных на угловом расстоянии, сравнимом с шириной луча, вновь могут перекрыться друг с другом, что приведет к уже упомянутым последствиям. При этом, пытаясь извлечь необходимые сведения о каждом входящем в принимаемую суперпозицию сигнале, наблюдатель опирается на тот факт, что отличительным признаком индивидуального сигнала является направление прихода. Если, например, наблюдатель знает априори, что эхосигналы, которые могут наложиться, отличаются друг от друга доплеровским смещением частоты и на этой основе строит стратегию определения числа наблюдаемых сигналов и их параметров, то уместно говорить о разрешении по частоте. Характерны для локаторов и такие комбинации, как совместное разрешение по времени запаздывания и углу, времени запаздывания и частоте и т. п.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
