

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Однако непрерывное изменение частоты по линейному закону практически неосуществимо и приходится применять периодическую модуляцию частоты, что изменяет работу системы. Практически используют три вида модуляции: симметричную линейную (СЛЧМ), несимметричную линейную (НЛЧМ) и гармоническую (синусоидальную) (ГЧМ).
Рассмотрим работу частотного дальномера при использовании симметричной линейной модуляции. Структурная схема простейшего частотного дальномера представлена на рис. 9.3. а. Работу дальномера при неизменном расстоянии до объекта поясняет временная диаграмма на рис.
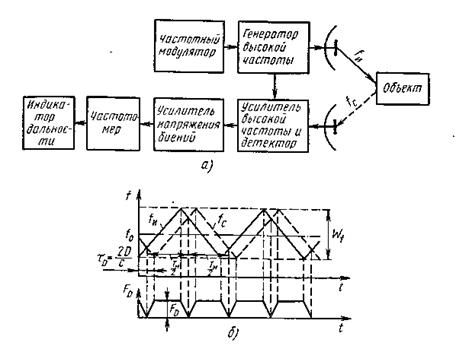
Рис.9.3. Частотный дальномер
Верхний график характеризует изменение частоты излучаемых (сплошная линия) и принимаемых (пунктирная линия) колебаний, имеющих среднюю частоту f0, период модуляции Tм и девиацию частоты Wf. Нижний график воспроизводит изменение разностной частоты биений FD. При выполнении условия, FD » FM = 1 / Tм можно записать:
fи=fo + υt = ![]() ; fс=fo + υ(t – τВ );
; fс=fo + υ(t – τВ );  . (9.7)
. (9.7)
Выражение для FD не учитывает провалы кривой FD(t) при fи=fс - Фактически частотомер фиксирует среднюю частоту биений за период модуляции:

![]() ;
;  (9.8)
(9.8)
Обычно в частотных системах измерения дальности одного объекта в качестве частотомера используют счетчик импульсов, который фиксирует число биений за период модуляции:  (9.9)
(9.9)
Одним из очевидных путей уменьшения постоянной погрешности является увеличение девиации частоты. Однако из-за ряда причин возможности увеличения Wf ограничены, поэтому при необходимости устранения или радикального уменьшения постоянной погрешности применяют усложненные системы, например системы с двойной частотной модуляцией.
9.2. Методы измерения скорости
Доплеровский метод измерения путевой скорости и угла сноса
В настоящее время широкое применение для управления объектом получили автономные средства навигации. К их числу относятся и доплеровские измерители вектора скорости объекта, например летательного аппарата (ЛА). Наиболее распространенными являются доплеровские измерители путевой скорости и угла сноса (ДИСС). Напомним, что путевой скоростью самолета называют горизонтальную проекцию скорости ЛА относительно земной поверхности. Путевая скорость W связана с воздушной скоростью V и скоростью ветра U навигационным треугольником, в котором угол φ между векторами воздушной и путевой скорости называется углом сноса, поскольку его причиной является ветер. Доплеровский измеритель позволяет непосредственно определить путевую скорость по спектру частот сигнала, отраженного земной поверхностью.
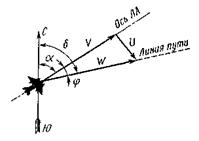
Рис. 9.4. Расположение лучей и треугольник скоростей
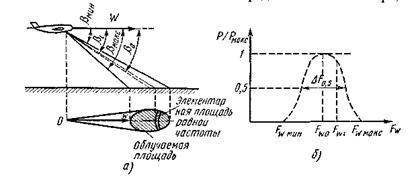
При горизонтальном полете ЛА для обеспечения достаточно большой проекции вектора скорости W на направление облучения и сохранения значительного отражения в направлении ДИСС применяют наклонное облучение земной поверхности (рис. 9.5, а).
|
|
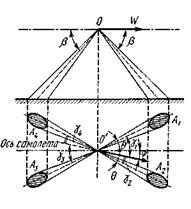
Рис. 9.5. Принцип работы доплеровского лага
Четырехлучевая система см. 9.5.в сочетает преимущества односторонней и двусторонней двухлучевых систем, заключающиеся в уменьшении погрешностей из-за продольного и поперечного кренов, поскольку их влияние практически компенсируется при вычитании доплеровских смещений противоположно направленных лучей. Сохраняется и высокая чувствительность к изменению доплеровского смещения при отклонении оси самолета в горизонтальной плоскости, что позволяет найти угол сноса или поперечную составляющую скорости с высокой точностью. Большим достоинством системы является также снижение требований к кратковременной стабильности частоты.
Корреляционный метод измерения путевой скорости W и угла сноса заключается в измерении времени задержки между отраженными от подстилающей поверхности сигналами, принимаемыми разнесенными антеннами, расположенными на ЛА. Предположим, что передающая антенна Аи и две приемные антенны А1 и А2 (рис. 9.6, а) расположены на продольной оси ЛА на расстоянии d и имеют ДНА, направленные вертикально вниз. Полет происходит без сноса (φ = 0). Тогда максимальное значение функции взаимной корреляции сигналов s1(t) и s2(t + τ3), принятых первой и второй антеннами и смещенных по времени на τз будет соответствовать моменту, когда ЛА пролетит расстояние, равное d. Если в первый канал приемника (рис. 9.6, б) ввести устройство регулируемой задержки τ = τз = d/W, то функция  достигнет максимального значения, фиксируемого прибором на выходе усредняющего фильтра. Скорость определяется по формуле
достигнет максимального значения, фиксируемого прибором на выходе усредняющего фильтра. Скорость определяется по формуле ![]() , где 2d - расстояние между приемниками; t - корреляционная временная задержка, при которой коэффициент взаимно корреляционной функции имеет максимум /3/.
, где 2d - расстояние между приемниками; t - корреляционная временная задержка, при которой коэффициент взаимно корреляционной функции имеет максимум /3/.
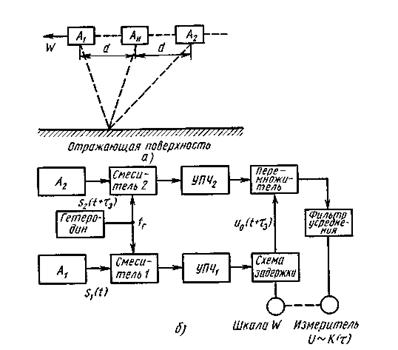
Рис. 9.6. Принцип работы корреляционного лага
При этом шкала регулятора задержки может быть проградуирована в единицах путевой скорости. В реальных измерителях применяется три приемных антенны Al A2 и А3 , что позволяет измерять не только W, но и угол сноса φ. Задержки сигналов, принимаемых парами антенн AiA2 и А1А3, соответствуют максимальным значениям функций взаимной корреляции. Так же как и в случае ДИСС, точность корреляционных измерителей падает при эволюциях ЛА. Так, относительная погрешность измерения W при полете с углом тангажа η равна ∆W/W=1 - cosη}. Примерно такова же относительная погрешность измерения угла сноса если его абсолютное значение незначительно. Флуктуационная погрешность корреляционных измерителей связана с ограниченным временем усреднения в реальных измерителях. Сравнение доплеровских и корреляционных измерителей показывает, что по точности они примерно равноценны. Однако при полете над водной поверхностью корреляционные измерители предпочтительнее, так как в отличие от ДИСС они сохраняют работоспособность и при спокойной поверхности. Это объясняется тем, что ДНА корреляционных измерителей направлены вертикально и отраженные сигналы при спокойной поверхности не только не пропадают, как в ДИСС с наклонным облучением поверхности, а даже возрастают. На основе корреляционного метода возможно создание и комбинированного измерителя для определения высоты и составляющих скорости полета ЛА.
Измеритель скорости в составе навигационного комплекса. Возрастающие требования к точности и надежности управления полетом ЛА удовлетворяются как путем улучшения характеристик отдельных навигационных измерителей, так и объединением их в единый навигационный комплекс. В состав комплекса в различных сочетаниях включают инерциалъную систему навигации, доплеровский (или корреляционный) измеритель путевой скорости и угла сноса, датчик воздушной скорости, измеритель курса, крена и тангажа (курсовертикаль), а также угломерно-дальномерную систему ближней навигации (РСБН), радиосистему дальней навигации(РСДН), бортовую РЛС и другие датчики навигационной информации. Объединение и обработка навигационной информации осуществляются с помощью бортовой ЭВМ. При этом обеспечивается непрерывное автоматическое измерение координат ЛА, его путевой и воздушной скорости, курса, углов сноса, крена и тангажа, барометрической и истинной высот. Основой непрерывного определения координат ЛА является счисление пути с помощью данных инерциальной системы навигации, измерителей воздушной скорости, курса, крена и танагажа, а также путевой скорости и угла сноса, измеряемых ДИСС или корреляционным измерителем. Объединение инерциальной и доплеровской систем при счислении пути повышает надежность и точность управления полетом, поэтому радиотехнический измеритель скорости стал неотъемлемым элементом пилотажно-навигационных комплексов.
9.3. Методы измерения угловых координат
Для измерения угловых координат в радиолокации и радионавигации используется радиопеленгование, т. е. определение направления на источник принимаемого радиосигнала. Зависимость напряжения принимаемого радиосигнала от направления прихода радиоволн, заданного углами α и β в горизонтальной и вертикальной плоскостях, можно представить выражением
 (9.10)
(9.10)
где τD — время задержки сигнала, пропорциональное расстоянию от источника сигнала до приемной антенны; f(t - τD) — частота сигнала; φ(t - τD) — фаза колебаний радиосигнала; G(α), G(β) — функции, описывающие ДНА в горизонтальной и вертикальной плоскостях.
Таким образом, для определения направления прихода радиоволн можно непосредственно использовать зависимость амплитуды принимаемого сигнала от отклонения оси ДНА от направления на источник радиосигнала, выражаемую функциями G(α) и G(β).
Такой метод пеленгования называется амплитудным. При приеме сигнала на две или несколько разнесенных в пространстве антенн фазовый сдвиг сигналов, возбуждаемых в антеннах, зависит от направления прихода радиоволн. Метод определения направления измерением фазовых сдвигов сигналов в антеннах называют фазовым. Применяются также комбинированные амплитудно-фазовые методы пеленгования.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
