


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
- двусторонняя проводимость генератора, т. е. естественная возможность работы во всех четырех квадрантах;
- отсутствие искажений питающей сети;
- высокий коэффициент мощности.
- регулирование скорости вращения двигателя в широких пределах производится управлением сравнительно небольшой мощности, в 50-100 раз меньшей, чем на выходе генератора;
- способ регулирования позволяет реализовать динамическое и генераторное торможение двигателя, а также осуществить реверс (путем изменения направления тока в ОВ генератора).
Недостатки:
- большая масса, габаритные размеры и стоимость [34];
- невысокий КПД системы (трехкратное преобразование энергии): примерно 0,6 ...0,7 [34];
- необходимость обслуживать генератор;
- инерционность цепи управления.
Область применения
Данный вариант не применяли в электроприводах малой мощности [16], обычно применялся при значительных мощностях (сотни кВт и выше), например, в металлургии, мощных экскаваторах [40].
В настоящее время применяется ограниченно.
2) Электрический способ, при котором изменение напряжения питания ДПТ осуществляется с помощью управляемого статического преобразователя (система УП-Д, рис.32).
Рис.37. Система УП-Д [40]
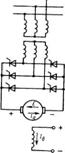
2.1) Использование в качестве УП управляемого выпрямителя (УВ) (рис.38).
Тиристоры УВ включаются схемой управления с задержкой на угол α по отношению к моменту естественного включения.
Достоинства:
- отсутствие вращающихся машин;
- высокий КПД, за счет низкого падения напряжения в тиристорах [43];
- не требуют обслуживания;
- имеют высокое быстродействие.
Рис.38. Управление ДПТ с использованием нереверсивного УВ [34] | Недостатки: - низкий коэффициент мощности при пониженном напряжении cos φ » cos α [40]. - повышенные пульсации напряжения и, как следствие, пульсации тока [34]. Это ухудшает коммутацию, увеличивает потери мощности, искажает напряжение питающей сети, что трудно скомпенсировать при значительных мощностях, приводит к повышенному уровню излучаемых радиопомех. Это приводит к необходимости в сглаживающих и уравнительных реакторах, утяжеляющих конструкцию [40]. Особенно велики пульсации при питании от однофазной сети. Система применима при наличии источника переменного тока [16]. |
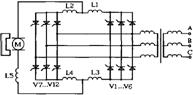
Рис. 39. Управление ДПТ с использованием нереверсивного УВ [43] | При необходимости работы ДПТ во всех четырех квадрантах механической характеристики, в частности, если требуется быстрая остановка механизма с последующим реверсированием и рекуперативное торможение, применяются реверсивные схемы ТП, которые фактически состоят из двух нереверсивных ТП (рис.39), поэтому их часто называют двухкомплектными ТП [43]. |
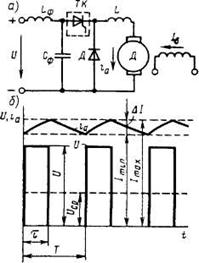
2.2) Использование в качестве УП импульсного регулятора напряжения ИРН (рис.40).
Рис. 40. Вариант схемы и диаграммы при импульсном управлении ДПТ [34] | Сущность управления заключается в импульсном управлении силовым полупроводниковым ключом, периодически подключающим двигатель Д к источнику постоянного тока. В зависимости от схемы ИРН, к двигателю прикладываются однополярные или разнополярные прямоугольные импульсы с неизменной амплитудой напряжения. Изменение напряжения производится за счет изменения скважности τ/Т: отношения времени, в течение которого к двигателю подводится напряжение, к времени, в течение которого напряжение не подводится или подводится напряжение обратной полярности. При приложении, например, однополярных импульсов напряжения, во время действия импульса двигатель разгоняется до некоторой угловой скорости, а во время паузы – тормозится. В результате вал двигателя вращается с некоторой средней угловой скоростью, зависящей от соотношения времени импульса и паузы, и совершает колебания относительно этой средней угловой скорости. Чем выше частота переключений, тем меньше колебания скорости. |
Рис. 41 Еще один вариант схемы при импульсном управлении ДПТ | Частоты следования импульсов при номинальном режиме обычно составляет 200...400 Гц, вследствие чего период Т примерно на два порядка меньше постоянной времени цепи якоря. Поэтому за время импульса ток в двигателе не успевает значительно возрасти, а за время паузы - уменьшиться. Если параметры схемы выбраны так, что пульсация тока не превосходит 5... 10%, то работа двигателя обычно удовлетворительна [34]. |
Способы регулирования скважности τ/Т [43]:
1) При T=const (f=const) и регулировании времени включения ключа τ. Такой способ называется широтно-импульсной модуляцией (ШИМ), а ИРН - широтно-импульсным преобразователем (ШИП).
2) При τ=const и регулировании частоты импульсов f (периода Т). ИРН в этом случае называют частотно-импульсным преобразователем (ЧИП).
3) При изменении как частоты импульсов, так и продолжительности замкнутого состояния ключа. ИРН называт в этом случае широтно-частотный импульсный преобразователь (ШЧИП).
Наибольшее распространение в технике электропривода получило широтно-импульсное регулирование скорости вращения.
Режим прерывистых токов
| При уменьшении момента сопротивления на валу двигателя (среднего тока) и малых значениях индуктивности якорной цепи (быстром изменении тока) мгновенные значения тока якоря I могут достигать нулевого значения (рис.42а) [43]. На рис.42б область слева от пунктирной линии соответствует режиму прерывистых токов, а область справа от нее - режиму непрерывных токов (здесь g – скважность τ/Т). При прерывистых токах скорость идеального холостого хода для всех значений скважности будет одинаковой [43]. Действительно при Мс=0 при периодическом подключении двигателя к сети его ротор будет разгоняться с появлением каждого импульса напряжения, а при отсутствии тока скорость будет оставаться неизменной (отсутствует торможение). Разгон будет производиться до значения W0=U/c0Ф [43]. |
Рис. 42. Прерывистый ток и механические (электромеханические) характеристики ДПТ при управлении с помощью ИРН [42]. |
 а)
а)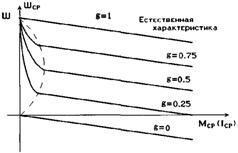 б)
б)Для сужения области прерывистых токов можно увеличивать частоту коммутации (в современных электроприводах частота коммутации может достигать 18 кГц), или вводить добавочную индуктивность в якорную цепь (для увеличения запаса электромагнитной энергии в якоре двигателя) [43].
2.16.4. Комбинированный способ (двухзонное регулирование)
Цель: расширение диапазона регулирования: до 20-30.
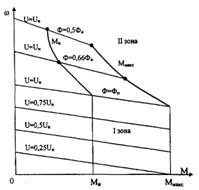
Рис.43. Двухзонное регулирование [46] | Заключается в следующем. При угловых скоростях меньше номинальной регулирование производится путем изменения напряжения с постоянным моментом. Магнитный поток при этом остается постоянный (равным номинальному, т. е. максимальному значению). При угловых скоростях выше номинальной регулирование производится путем изменения магнитного потока в условиях постоянства мощности. Напряжение питания при этом остается постоянным (равным номинальному, т. е. максимальному значению). В случае, если и в зоне управления потоком производить регулирование при постоянном моменте, это приведет к работе двигателя при токах, превышающих номинальное значение. Это недопустимо в длительном режиме. |
Стоит заметить, что применение такого комбинированного способа требует дополнительного оборудования и усложняет управление двигателем.
2.17. Управление ДПТ в замкнутых системах
2.17.1. Стабилизация скорости вращения ДПТ
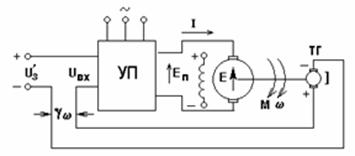
Рис.44 Схема ЭП замкнутого по скорости [40] |
Рис.45. Характеристики замкнутого по скорости ЭП постоянного тока [40] |
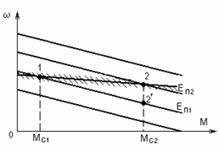
При изменении момента нагрузки ДПТ степень изменения скорости зависит от жесткости механической характеристики.
Если для качественной работы приводимого в движение агрегата требуется поддерживать скорость постоянной (а жесткость характеристик в разомкнутой системе УП-Д оказывается недостаточной), применяют замкнутые системы по скорости, т. е. вводят отрицательную обратную связь по скорости [40].
Для этого необходимо включить в систему измерительный орган (датчик скорости), в качестве которого на рис.44 приведен тахогенератор ТГ. Сигнал с выхода тахогенератора ЕТГ=kw сравнивается с задающим сигналом U’з (соответствующим заданной скорости), а разность U’з - kw подается на вход управляемого преобразователя УП (отрицательная обратная связь по скорости). Исходя из сигнала рассогласования Uвх=U’з - kw формируется сигнал управления УП и на выходе УП (входе ДПТ) формируется требуемое напряжение Еп [40].

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 |
