


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1) Малая мощность управления, так как мощность цепи возбуждения намного меньше мощности двигателя (как правило, она составляет 2-5% мощности двигателя).
КПД двигателя остается высоким. Например, при реостатном управлении потери в регулировочном реостате незначительны, так как ток возбуждения составляет небольшую долю номинального тока якоря. К тому же при уменьшении Iв мощность возбуждения UвIв уменьшается [14].
2) Регулирование скорости плавное, можно получить характеристики, расположенные как угодно близко друг к другу [40].
3) Простота реализации рассматриваемого способа регулирования и отсутствие дополнительных элементов в силовой цепи, в которых рассеивается энергия, делают способ весьма эффективным с экономической точки зрения: регулирование не сопровождается дополнительными потерями энергии [40].
Недостатки:
1) Невозможность уменьшения скорости вращения ниже номинальной.
Это существенно ограничивает область применения данного способа регулирования. Способ обычно применяется в сочетании с другими, позволяющими регулировать скорость вниз от основной [40].
2) Нелинейность регулировочной характеристики.
3) Неоднозначность регулировочной характеристики при определенных значениях момента [28].
4) Непостоянная жесткость механических характеристик при различных значениях потока [28].
Способы реализации:
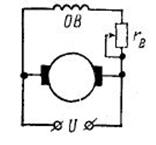
Рис.31. Схема ДПТ с ПарВ при изменении потока [25] | 1) Реостатно-контакторное управление (рис). Ток возбуждения изменяется путем ступенчатого регулирования сопротивления в цепи возбуждения. Этот способ менее надежен. Как и во всяких контактных системах в данном случае требуются профилактика и ремонты [19]. |
2) Использование управляемого полупроводникового выпрямителя [19].
3) Импульсное управление.
В электрооборудовании ЛА этот способ применяют для стабилизации угловой скорости электромашинных преобразователей рода тока. Рекомендуется использовать при W>Wном при двухзонном регулировании в сочетании с якорным управлением [15].
2.16.2.2. ДПТ с последовательным возбуждением
Изменение величины потока возбуждения в ДПТ с ПВ возможно следующими способами:
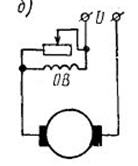
- шунтирование обмотки возбуждения реостатом (рис.32а). Изменение сопротивления Rш будет влиять на ток возбуждения Iв= Iя – Iш [31].
- уменьшение числа включенных в цепь питания витков обмотки возбуждения. В этом случае предусматриваются соответствующие выводы из обмотки возбуждения [14].
- шунтирование обмотки якоря реостатом Rш. а. При уменьшении Rш. а ток и поток возбуждения возрастают, а скорость уменьшается. Так как падение напряжения на Rв мало и поэтому можно принять Rв = 0, то сопротивление Rш. а практически находится под полным напряжением сети, его величина должна быть значительной, потери в нем будут велики и КПД сильно уменьшится. Кроме того, шунтирование якоря эффективно только тогда, когда магнитная цепь не насыщена. В связи с этим шунтирование якоря на практике используется редко [14].
Остановимся на первом способе.
С уменьшением величины Rш увеличивается ток Iш, уменьшается ток Iв, уменьшается поток Ф, увеличивается угловая скорость W (рис.32б).
а) |
б)*** |
Рис.32. Схема (а) и механические характеристики ДПТ (б) с посл. возбуждением при регулировании путем изменения потока (Rш1> Rш2) [25,31] |

Данный способ регулирования является достаточно экономичным: сопротивление последовательной обмотки возбуждения мало, поэтому сопротивление Rш также выбирается малым. Потери в сопротивлении Rш поэтому тоже малы, а суммарные потери на возбуждение при шунтировании даже уменьшаются. Вследствие этого КПД двигателя остается высоким [14]. Потери энергии примерно такие же, как у ДПТ с НВ при регулировании угловой скорости изменением потока возбуждения [31].
Диапазон регулирования, как правило, не превышает 2:1 при постоянной нагрузке [31].
Способ находит применение в электроприводах требующих ускорения при малых нагрузках [31].
2.16.3. Регулирование угловой скорости ДПТ изменением питающего напряжения (якорное управление).
2.16.3.1. ДПТ независимого возбуждения
Рис.33. Переходный процесс в ДПТ при управлении напряжением [25] | В первый момент времени увеличение напряжения приводит к возрастанию тока якоря (Iя=(U–E)/R), а следовательно, и электромагнитного момента (M=с0ФIя). Скорость вращения (М-Мс = JdW/dt) и пропорциональная ей противоЭДС (Е=с0ФW) увеличиваются, вследствие чего ток якоря начинает уменьшаться (Iя=(U–E)/R). Процесс увеличения скорости вращения и уменьшения тока якоря и момента длится до тех пор, пока не будет достигнуто равенство М=Мс. Это случится при тех же значениях тока и момента, но при большей скорости [25]. |
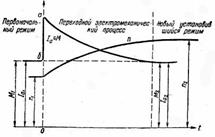
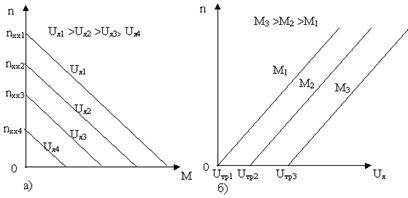
Рис.34. Механическая (а) и регулировочная(б) характеристика ДПТс независимым возбуждением [37].
(М1=0 – идеальный холостой ход)
Особенности регулирования
1) Регулирование однозонное. Регулирование возможно только при уменьшении напряжения вниз от номинального значения. При этом скорость вращения изменяется вниз от номинального значения.
2) При уменьшении напряжения питания скорость идеального холостого хода Wихх=U/(с0Ф) уменьшается.
3) Жесткость характеристики β=dM/dW=(с0Ф)2/Rя. ц не зависит от напряжения и достаточна высока. Как следствие, достаточно высокая стабильность скорости.
Отметим, что жесткость получаемых механических характеристик ниже, чем у естественной характеристики двигателя, поскольку Rя. ц = Rя + Rп, где Rп – сопротивление преобразователя (статического или якоря генератора, см. далее) [40].
4) Регулирование скорости может быть реализовано при постоянном моменте сопротивления: Мдоп=const.
Следует отметить, что понижение скорости в машинах с самовентиляцией сопровождается ухудшением охлаждения. При этом при продолжительном режиме работы на пониженной скорости нагрузочный момент должен быть ниже номинального [22].
5) Диапазон регулирования в разомкнутой структуре составляет 10...12; 8...10 [10].
Достоинства:
1) Линейность регулировочных характеристик (при отсутствии нелинейности в характере нагрузки) - одно из важнейших достоинств коллекторных ДПТ [23].
2) Большой диапазон регулирования.
3) Регулирование плавное [40].
4) Способ экономичен в эксплуатации, поскольку не используются дополнительные резисторы, рассеивающие энергию [40].
Капитальные затраты определяются типом используемого УП. Следует отметить, что при управлении напряжением отпадает необходимость в пусковых и тормозных резисторах с соответствующей коммутационной аппаратурой [40].
Способ часто используется в сочетании с ослаблением поля и является основным при построении замкнутых структур электропривода [40].
2.16.3.2. ДПТ последовательного возбуждения
а)*** |
б)*** |

Рис. 35. Механические (а) и регулировочные (б) характеристики ДПТ с последовательным возбуждением (без учета насыщения) (U3<U2<U1) [31].
Регулировочные характеристики в отличие от случая с независимым возбуждением не параллельны, а представляют собой пучок прямых линий, исходящих из точки с указанными координатами.
Диапазон регулирования скорости разомкнутых систем не превышает 4:1, но при введении обратных связей он может быть на несколько порядков выше [31].
Достоинством способа является высокий КПД [31].
Данный способ регулирования ДПТ с ПВ широко применяется в транспортных установках, где на каждой ведущей оси устанавливается отдельный двигатель и регулирование осуществляется путем переключения двигателей с параллельного подключения к источнику напряжения на последовательное (т. е. ступенчатое уменьшение напряжения) [32].
Способы реализации.
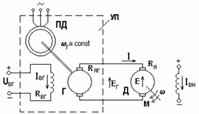
1) Электромеханический способ, при котором изменение напряжения, подводимого к якорю двигателя, может осуществляться генератором постоянного тока независимого возбуждения. Такая система получила название "генератор-двигатель" – Г-Д (рис. 31) (иногда можно встретить название "агрегат Леонарда" [14]).
Рис. 36. Схема системы "Г-Д"[40] | Генератор Г приводится во вращение от приводного двигателя ПД (от электродвигателя постоянного или переменного тока в промышенности или от дизеля на транспорте), угловая скорость которого стабилизирована. Значение подводимого к двигателю напряжения изменяют путем изменения тока возбуждения генератора Iвг. Обычно при этом и поток и сопротивление цепи якоря двигателя Д остается постоянным. При определенных условиях жесткость механических характеристик и расширение практического диапазона регулирования скоростей вращения (до 200) может быть повышена при применении электромашинного усилителя вместо обычного генератора [2]. |
Достоинства [40]:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 |
