


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Недостаток:
- снижение эффективности торможения с уменьшением скорости вращения, т. к. тормозной момент Мт прямо пропорционален W [31].
Динамическое торможение ДПТ с последовательным возбуждением.
Применяется реже, чем торможение противовключением [39].
1) Динамическое торможение при переводе ДПТ на независимое возбуждение.
Рис. 58. Перевод ДПТ с ПВ на независимое возбуждение при динамическом торможении [31].*** | Торможение осуществляется как и у ДПТ с НВ. Обмотка возбуждения отключается от якорной цепи и подключается через токоограничительный резистор Rв к источнику постоянного тока, а якорная обмотка замыкается на тормозное сопротивление Rт (рис.48) [31]. Напомню, что все эти переключения делаются при вращающемся двигателе с целью его торможения. |

2) Динамическое торможение ДПТ в режиме самовозбуждения
В случае с ДПТ с ПВ отключаются от источника напряжения и замыкаются на внешний резистор и обмотка якоря и обмотка возбуждения.
Если это будет сделано так, как показано на рис.59а, токи якоря и возбуждения сначала спадут до нуля. Далее под действием потока остаточного магнетизма Фост в проводниках якоря возникает некоторая ЭДС Еост. Эта ЭДС создаст токи якоря и возбуждения, которые будут протекать по сравнению с двигательным режимом в обратном направлении. Ток возбуждения такого направления размагнитит машину (Ф = 0). Тормозного момента создано не будет [40].
а) б)
Рис.59. Перевод ДПТ с ПВ в режим динамического торможения
Для создания тормозного момента ток возбуждения, созданный (как и ток якоря) остаточной ЭДС Еост, должен протекать в том же, что и раньше, направлении, усиливая магнитный поток [40]. Такой процесс называют самовозбуждение двигателя.
Итак, для этого остаточный магнитный поток Фост должен быть такого знака, чтобы при данном направлении вращения ЭДС Еост, наводимая остаточным магнитным потоком, вызывала ток возбуждения, увеличивающий магнитный поток [13].
Это условие выполнится, если при переходе на режим торможения переключить обмотку возбуждения так, как показано на рис.59б [40]. Другой вариант – переключение ОЯ [13].
Ток, создаваемый увеличивающейся ЭДС, изменит знак, момент будет направлен против движения, т. е. станет тормозным (второй квадрант) [40].
При этом вначале происходит интенсивное самовозбуждение, которое ведет к скачку тормозного момента. Такое ударное, а не "вязкое" торможение для ряда механизмов бывает неприемлемым и это ограничивает применимость данного способа торможения [31].
Также ДПТ самовозбудится, при изменении направления вращения, например, за счет внешнего момента, т. е. при Ω<0 (четвертый квадрант) [13].
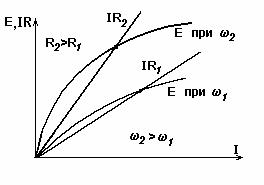
Работа машины постоянного тока с самовозбуждением возможна лишь при определенных условиях, а именно при таких значениях скорости Ω и сопротивления цепи якоря Rяц=Rя+Rв+Rт, чтобы имело место равенство Е=IяRяц.
Существованию этого равенства отвечает наличие точки пересечения кривых Е=с0ФΩ=f(I) (при данной скорости) и прямой IяRяц = f(I) (рис.60). Очевидно, что чем больше Rяц, тем при большей скорости произойдет самовозбуждение машины.
Рис.60. Самовозбуждение ДПТ [40] |
Рис.61. Характеристики динамического торможения с самовозбуждением [40]. |
Достоинством торможения с самовозбуждением является его экономичность. Двигатель в этом случае не потребляет энергию из сети [31].
Сравнение энергетических показателей динамического торможения и торможения противовключением показывает, что потери электроэнергии в якорной цепи в режиме противовключением относятся к потерям при динамическом торможении, как 3:1, а при реверсе – 4:1 [5].
2.20. Номинальные и допустимые данные ДПТ [40]
Номинальные данные указываются на заводском шильдике (или в паспорте).
Для двигателей, предназначенных для работы в продолжительном режиме, к ним относятся:
- напряжение Uном, В;
- ток Iном, А;
- мощность на валу Рном, кВт;
- частота вращения nн, об/мин;
- КПД ηном;
- напряжение возбуждения Uв. ном, В (для двигателей независимого возбуждения);
- ток возбуждения Iв. ном, А (для двигателей независимого возбуждения);
- момент инерции Jн, кг×м2,
- исполнение двигателя IP.
Номинальные данные соответствуют одной точке в плоскости W-М. В действительности электропривод работает в любых точках и совсем не при номинальных данных. Определим допустимые значений основных координат – тока, момента, скорости.
Напряжение ограничивается номинальным значением U≤Uном. В реверсивных электроприводах допускается на время реверса (кратковременно) двукратное превышение номинального значения.
Магнитный поток также ограничен номинальной величиной Ф≤Фном, поскольку при ее длительном превышении ток возбуждения, превышающий номинальный, может вызвать недопустимый перегрев обмоток. Кратковременное (до минуты) двукратное увеличение тока возбуждения, используемое, например, в электроприводах с питанием якорной цепи от источника тока, допустимо, однако вследствие насыщения магнитный поток при этом увеличивается незначительно.
При форсировках – ускоренном нарастании магнитного потока – допустимо кратковременное 2-3 – кратное превышение номинального напряжения возбуждения.
Скорость по условиям механической прочности ограничена номинальным значением с небольшим 20-30% допустимым превышением; специальные двигатели, предназначенные для работы с ослабленным полем, допускают 3-4-кратное превышение номинальной скорости.
Рис. 62. Область допустимых нагрузок электропривода постоянного тока [40]. | Ток якоря – координата, определяющая надежность работы электропривода. В продолжительном режиме ток на всех скоростях не должен превышать номинального значения при независимом охлаждении двигателя – сплошные линии со штриховкой на рис.62. В двигателях, охлаждаемых собственным вентилятором, в продолжительном режиме необходимо снижать ток на 30-40% при низких скоростях – пунктир на рис.62 во избежание недопустимого перегрева. Кратковременные (секунды) перегрузки по току ограничиваются условиями коммутации машины; допустимые перегрузки обычно не превышают (2-3)Iном – линии с двойной штриховкой на рис.62. Момент при полном потоке имеет те же ограничения, что и ток якоря. Таким образом, зона допустимых значений cкорости, тока и момента сравнительно невелика. Внутренняя область рис. относится к продолжительному режиму, внешняя – к кратковременным (секунды) перегрузкам. |
2.21. Примеры областей применения КДПТ на ЛА
Электродвигатели постоянного тока, применяемые для привода исполнительных механизмов на ЛА, принципиально ничем не отличаются от электродвигателей, применяемых в наземных установках.
Коллекторные ДПТ (КДПТ) с напряжением питания 27 В используются, например, в электромеханизмах ( завод» «Лепсе», г. Киров) для выпуска и уборки предкрылков МВД25Д25М, механизме привода закрылков МПЗ-18А-5, механизме управления стабилизатором МУС-3, механизме для дистанционного управления закрылками УЗ-1АМ [13].
Широко используются коллекторные ДПТ для привода маломощных электромеханизмов мощностью до 100 Вт. Практически все ДПТ высокоскоростные (до 25000 об/мин), реверсивные (94%), повторно-кратковременного (65%) и кратковременного (19%) режимов работы, кратность пускового момента не ниже 3,5-4,0. Для 15% ДПТ предусмотрено регулирование частоты вращения (диапазон 1:10). Для обеспечения эффективного торможения, фиксации и исключения «самохода» ротора в отключенном состоянии около 70% всех ДПТ выполнены с встроенной электромагнитной фрикционной муфтой торможения. Кроме того, авиационные ДПТ снабжены устройствами защиты от перегрузок. Для исключения нежелательных перегрузок в системе управления используются контактные концевые выключатели [21].

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 |
