


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Пусть привод был нагружен моментом Мс1 и работал в т.1 (рис. 45). Затем момент сопротивления увеличился до значения Мс2. В разомкнутой схеме этому изменению соответствовала бы точка 2’, так как изменение Мс не приводило бы к изменению выходного напряжения преобразователя Еп [40].
В замкнутой системе уменьшение скорости повлечет за собой рост входного сигнала
Uвх=U’з-kw, а значит и Еп. Следовательно, при Мс2 привод перейдет на характеристику, соответствующую Еп2>Еп1 и будет работать в точке 2. В рассматриваемой схеме w2<w1, так как увеличение Uвх, а значит и Еп возможно лишь за счет некоторого уменьшения w. Такие системы называют статическими, в отличие от астатических, где Dw=0 [40].
2.17.2. Стабилизация (ограничение) момента ДПТ
Пусть требуется ограничить момент, развиваемый двигателем, некоторой предельной величины Мпред.. В системе УП-Д эту задачу можно решить, снижая ЭДС преобразователя при достижении моментом величины Мпред. Эта операция выполняется автоматически, если использовать соответствующую обратную связь. В данном случае целесообразно использовать обратную связь по моменту или по току, который ему пропорционален (при Ф = const), причем эта связь должна вступать в действие лишь при достижении током некоторого заданного значения. Такие обратные связи называют нелинейными или связями с отсечкой. Простейшая схема системы УП-Д с отрицательной обратной связью по току с отсечкой показана на рис.46 [40].
Рис. 46. Схема ЭП постоянного тока с обратной связью по току при ограничении момента [40]. |
Рис.47. Характеристики ЭП постоянного тока с обратной связью по току при ограничении момента [40]. |
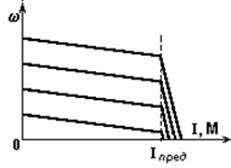
На вход управляемого преобразователя УП при I<Iпред поступает лишь сигнал задания, поскольку сигнал обратной связи по току заперт вентилем В (IRос<Uоп). При достижении моментом величины Мпред отрицательная обратная связь по току начинает действовать, т. е.
Uвх = Uз – αI. Снижается Еп и рост момента ограничивается. Изменением Uз можно установить требуемую характеристику (рис. 47), а изменением Uоп – задать нужный предельный момент [40].
2.18. Замкнутые системы управления электроприводами [42].
Наибольшее применение в электроприводах нашел принцип подчиненного управления. Электроприводы с системой управления, построенной по подчиненному принципу, имеют, как правило, два контура регулирования: контур тока и контур скорости (рис.48).
Подчиненное регулирование основано на том, что внешний контур вырабатывает сигнал задания для внутреннего контура. Внутренний контур является звеном внешнего контура и его параметры учитываются при оптимизации последнего.

Рис.48. Структурная схема тиристорного электропривода с двухконтурным подчиненным регулированием скорости.
PC — регулятор скорости; РТ — регулятор тока; ТП — тиристорный преобразователь; М — ДПТ; Кi — коэффициент передачи датчика тока; Кω - коэффициент передачи ТГ.
В качестве регулятора тока РТ и регулятора скорости РС может использоваться, например, пропорционально-интегральный (ПИ) регулятор (рис.49)
Рис.49. Схема ПИ—регулятора и его переходная характеристика | Сигнал на выходе ПИ-регулятора UВЫХ пропорционален входному сигналу UBx и интегралу от входного сигнала по времени. Выходное напряжение ПИ-регулятора перестанет изменяться и будет сохранять постоянное значение лишь в случае, когда входной сигнал регулятора становится равным нулю, т. е. при помощи ПИ-регулятора достигается принцип астатизма, при котором сигнал управления изменяется до тех пор, пока в системе имеется рассогласование. |

Устойчивой работы привода можно достичь и при пропорциональном регуляторе скорости. Однако при этом в контуре появляется статическая ошибка, то есть в установившемся состоянии скорость двигателя будет отличаться от заданного значения. Особенно это отличие будет проявляться при нагруженном двигателе.
Задающим сигналом для второго внешнего контура является сигнал задания угловой скорости UЗС, а для первого - сигнал с выхода регулятора скорости PC - UЗТ.
Настройку каждого контура производят так, чтобы получить технически оптимальный переходной процесс, например, чтобы время выхода на установившийся режим t1 было минимальным при условии, что перерегулирование не будет превышать 4...10%.
В результате реализации системы подчиненного регулирования ДПТ утрачивает свои естественные свойства. Процесс пуска протекает в системе следующим образом. Контур регулирования тока первоначально вынуждает ток ДПТ следовать задающему сигналу, угловая скорость же вращения ДПТ w устанавливается в соответствии с нагрузкой. Внешний контур осуществляет регулирование w согласно заданному значению и, исходя из ошибки регулирования Δw, вырабатывает сигнал задания тока UЗТ, в соответствии с которым устанавливается ток ДПТ.
Ограничение заданного тока приводит к ограничению тока двигателя. Если заданная w изменяется скачком на значительную величину, то возникает такая ошибка регулирования, что вступает в действие ограничение задания тока. ДПТ разгоняется при одновременном ограничении тока, пока ошибка регулирования w не уменьшится настолько, что значение тока станет меньше предельно допустимого значения. В связи с этим становится возможным прямой пуск ДПТ без проявлений недопустимых перегрузок привода. Однако при работе токоограничения фактически размыкается контур регулирования скорости и разгон (торможение) идет с постоянным ускорением, что затягивает переходные процессы.
2.19. Тормозные режимы работы ДПТ
Тормозные режимы используются для осуществления быстрой остановки двигателя.
Особенности:
- электромагнитный момент и скорость вращения направлены противоположно.
- тормозные режимы – самые тяжелые с точки зрения нагрева частей электрической машины, поэтому большинство двигателей рассчитано лишь на кратковременную работу в тормозных режимах.
При рассмотрении тормозных режимов работы ДПТ имеет значение характер момента нагрузки (сопротивления). Его можно разделить на два вида:
- реактивный момент нагрузки (его знак определяется направлением вращения ДПТ)
- потенциальный (активный) момент нагрузки (его знак не зависит от направления вращения ДПТ).
2.19.1. Генераторное (рекуперативное) торможение.
На механических характеристиках (рис.50) рекуперативному торможению соответствуют участки ab и a’b’.
ДПТ переходит в режим рекуперативного торможения, когда угловая скорость двигателя W становится больше угловой скорости идеального холостого хода W0.
Если якорь ДПТ начнет вращаться со скоростью, превышающей скорость идеального холостого хода, то ЭДС двигателя Е=с0ФW будет больше приложенного напряжения U=с0ФW0, в результате чего ток в якоре двигателя Iя=(U-E)/Rяц и момент М=с0ФIя изменят свой знак. Механическая (кинетическая) энергия, запасенная ДПТ, преобразуется в электрическую и за вычетом потерь в двигателе рекуперируется в сеть.
Реализация
ДПТ с независимым и параллельным возбуждением
Переход в режим рекуперативного торможения возможен, если момент сопротивления Мс будет направлен в ту же сторону, что и вращающий момент М, т. е. будет движущим и помогать вращению.
Рис.50. Участки механической характеристки ДПТ при его работе в различных режимах [35] |
Рис.51. Механические характеристики ДПТ с участком рекуперативного торможения [31]*** |
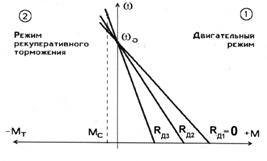
Данный режим возникает в приводе грузовой лебедки с двигателем параллельного возбуждения при опускании груза. Груз создает потенциальный момент, который совпадает по направлению со скоростью вращения. В результате этого скорость становится больше скорости идеального холостого хода. В отличие от случая свободно движущегося груза под действием силы тяжести, в случае работы привода в режиме генераторного торможения груз движется с неизменной ограниченной скоростью [2].
Рис.52. Динамическое торможение ДПТ [28] | Двигатель может перейти в режим рекуперативного торможения при резком уменьшении скорости идеального холостого хода W0. Это может произойти: - в результате уменьшения питающего напряжения (переход из точки А в точку В, рис.52). Торможение до остановки таким способом невозможно и он используется, в основном, при торможении на высоких скоростях [28]. - за счет увеличения тока возбуждения [34]. |

Рекуперативное торможение при импульсном регулировании [34].
Возможно осуществление при ЭДС двигателя, меньшей напряжения сети. В связи с этим рекуперативное торможение может осуществляться почти до полной остановки.
Рис.53. Схема рекуперативного торможения двигателя постоянного тока при импульсном регулировании | При рекуперативном торможении импульсный прерыватель ИП включают параллельно якорю двигателя, диод Д — между якорем и питающей сетью (рис.53). При отпирании прерывателя ИП якорь машины вместе с индуктивностью L замыкается накоротко. При этом увеличивается ток ia и накапливается электромагнитная энергия в индуктивностях (L + La), а возникающая ЭДС самоиндукции eL уравновешивает ЭДС машины Е (рис.53). При запирании прерывателя ИП ток ia под действием ЭДС самоиндукции проходит через диод Д и накопленная энергия отдается в сеть. Среднее значение тока, отдаваемого в сеть, определяется разностью между средней ЭДС якоря Е и напряжением сети U. При уменьшении частоты вращения якоря ток Ia, отдаваемый в сеть, уменьшается, хотя может оставаться постоянным ток якоря, а следовательно, и тормозящий электромагнитный момент. |
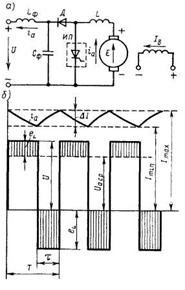
По мере снижения частоты вращения n и ЭДС Е для поддержания требуемого значения тока Iacp увеличивают частоту тока при частотно-импульсном регулировании или длительность импульса tи. при широтно-импульсном. При малой частоте вращения, когда γ растет до единицы, якорь машины остается все время замкнутым накоротко и отдача энергии в сеть прекращается. Однако ток Iacp проходит через якорь и режим торможения осуществляется практически до полной остановки.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 |
