


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
При достижении установившегося режима добавочное пусковое сопротивление закорачивают [10].
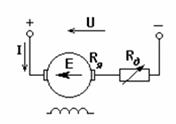
Во время пуска цепь обмотки возбуждения ОВ подключается к неподвижной контактной дуге д по которой скользит контакт П (рис.20а), чтобы во время пуска цепь возбуждения все время была под полным напряжением. Это необходимо для того, чтобы Iв и Ф при пуске были максимальными и постоянными, так как при этом при данных значениях Iя развивается наибольший момент М и наибольшее ускорение. С этой же целью регулировочный реостат возбуждения ставится при пуске в положение Rрв = 0 [32].
Если пуск производится вручную, то ступени реостата выводят, ориентируясь на показания амперметра, включенного в цепь якоря. Это возможно, если двигатель нагружен и момент инерции на его валу большой. Если производится пуск ненагруженного двигателя, то уже на первой ступени, т. е. при максимальном пусковом сопротивлении, он достигает скорости, близкой к режиму холостого хода, и дальнейшее выведение ступеней реостата мало влияет на ток двигателя [34].
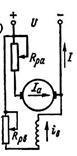
Пуск ДПТ по схеме, изображенной на рис 20а, сложно автоматизировать. В автоматизированных установках вместо пускового реостата используют пусковые сопротивления (рис.20в), которые поочередно шунтируются контактами К1, К2, К3 автоматически работающих контакторов [14].
В двигателях большой мощности вывод ступеней реостата производится под контролем токового реле: уменьшение сопротивления производится в тот момент, когда ток двигателя уменьшается до значения, соответствующего минимальному моменту Ммин [34].
Для упрощения схемы и уменьшения количества аппаратов число ступеней принимается минимальным (у двигателей малой мощности обычно 1—2 ступени) [14].
Для поддержания постоянного ускорения привода следует постепенно уменьшать добавочное сопротивление таким образом, чтобы на всех стадиях пуска разность между моментом двигателя и моментом нагрузки (заштриховано на рис.21) находилась в определенных пределах и была достаточно велика.
Количество ступеней пускового реостата и величины их сопротивлений рассчитываются таким образом, чтобы при выбранных интервалах времени переключения ступеней максимальные и минимальные значения Iя на всех ступенях получились одинаковыми (рис.21) [14].
По условиям нагрева ступени реостата рассчитываются на кратковременную работу под током.
Пуск при пониженном напряжении
В процессе пуска (с увеличением скорости) напряжение должно повышаться с пускового значения до номинального. ОВ при этом нужно питать от источника с полным напряжением [14].
В качестве регулятора напряжения может выступать:
- отдельный генератор постоянного тока [14];
- управляемый выпрямитель [14];
- импульсный статический преобразователь (наиболее предпочтительный вариант).
В последнем случае ток в процессе пуска ограничивается на заданном предельном уровне, а регулирование напряжения осуществляется автоматически исходя из сравнения текущего и предельного значения тока (запуск с токоограничением). Посредством схемы управления задается так называемый токовый коридор. Между источником питания и ДПТ устанавливается силовой ключ, управляемый схемой ограничения тока. При достижении током предельного значения силовой ключ отключает обмотку, ток в ней спадает до нижнего граничного значения токового коридора, при котором ключ снова включается. Тем самым регулируется среднее значение напряжения, подаваемого на обмотку якоря. Процесс повторяется до тех пор, пока ток превышает нижний порог ограничения. Далее разгон продолжается по естественной характеристике, и ток уменьшается до наступления установившегося режима [16].
2.15. Реверсирование
Для изменения направления вращения ДПТ (как и любого другого двигателя) необходимо изменить знак создаваемого двигателем электромагнитного момента. Согласно (3) М=c0ФIя.
Таким образом, изменение направления вращения в ДПТ может быть выполнено:
- путем изменения направления потока возбуждения Ф за счет изменения тока возбуждения Iв, что достигается изменением полярности напряжения Uв, подаваемого на ОВ, при использовании независимой ОВ;
- путем изменения полярности напряжения U, подаваемого на ОЯ. Изменение полярности производится при выключенном двигателе.
Обмотка возбуждения обладает значительной индуктивностью, переключение ее нежелательно. Поэтому реверсирование двигателей постоянного тока обычно заключается в переключении обмотки якоря [27].
При использовании ДПТ с последовательным возбуждением изменение знака напряжения U, прикладываемого к двигателю, не приводит к изменению направления его вращения, так как при этом одновременно меняет направление и ток якоря Iя, и поток возбуждения Ф.
Вследствие этого, для обеспечения возможности реверсирования двигатели выполняются с двумя ОВ. Обмотки наматываются в противоположные стороны и путем подключения той или иной обмотки можно задать различное направление МДС ОВ, что эквивалентно изменению направления тока ОВ. Таким образом, из двух имеющихся ОВ в каждый момент времени работает только одна.
При сравнительно небольшой мощности электродвигателей, применяемых в авиации, увеличение их габаритов вследствие наличия второй ОВ компенсируется уменьшением числа контакторов, повышением простоты и надежности схемы управления.
2.16. Регулирование частоты вращения ДПТ
Регулирование не следует смешивать с самопроизвольным изменением угловой скорости при изменении нагрузки (момента) на валу.
Особенности способов регулирования частоты вращения рассмотрим для ДПТ с НВ и ДПТ с ПВ. Скорость вращения двигателей смешанного возбуждения обычно регулируется так же, как и в двигателях параллельного возбуждения, хотя в принципе можно использовать также способы, применяемые в двигателях последовательного возбуждения [39].
При рассмотрении способов регулирования скорости вращения необходимо учитывать, что при изменении скорости вращения двигателя меняются условия охлаждения его частей, что особенно сильно проявляется в самовентилируемых двигателях, в которых при уменьшении скорости вращения необходимо снижать длительную мощность с целью избегания недопустимого перегрева.
2.16.1. Регулирование скорости вращения ДПТ изменением сопротивления цепи якоря Rя. ц=Rя+Rдоб (резистивное, реостатное управление)
2.16.1.1. Независимое и параллельное возбуждение ДПТ.
Осуществляется путем введения в цепь якоря добавочных активных сопротивлений Rдоб (резисторов) при U = Uн, Ф = Фн.
Отметим, что для ДПТ с ПарВ цепь возбуждения должна быть включена на полное напряжение U (рис.23б) [32].
а) |
|
в)*** |
Рис.23. Схема для ДПТ с НВ (а), для ДПТ с ПарВ (б) и механические (электромеханические) характеристики (в) при реостатном управлении [40,14,31]. |
 б)
б)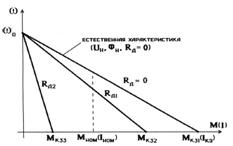
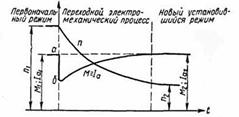
Рис.24. Переходный процесс в ДПТ при реостатном управлении [25] | Введение Rдоб уменьшает ток, вследствие чего уменьшается момент (М=с0ФIя) и угловая скорость двигателя (М-Мс = JdW/dt) (рис.24). Это приводит к уменьшению противоЭДС (Е=с0ФW), в результате чего ток якоря (Iя=(U–E)/R) и момент (М=с0ФIя) начинают возрастать и достигают своих первоначальных значений, при которых М=Мс. Это равенство будет достигнуто уже при другой установившейся угловой скорости W=W(2). Мощность на валу в новом режиме Рв=МW(2) будет меньше, чем в исходном режиме. Разность этих мощностей есть потери, выделяющиеся в Rдоб [25]. |
Характерные особенности регулирования:
1) Скорость идеального холостого хода W=U/(с0Ф) не меняется. То есть при Мс=0 (в режиме холостого хода) резистивное управление невозможно.
2) Регулирование однозонное, вниз от номинального значения скорости. При постоянной нагрузке на валу двигателя увеличение сопротивления в цепи якоря приводит к уменьшению скорости вращения ЭД.
3) Жесткость характеристик уменьшается с увеличением сопротивления цепи якоря:
b=DМ/DW= (с0Ф)2/(Rя+Rдоб) (29)
Это приводит к тому, что с увеличением Rдоб способность «держать» заданную скорость при изменении момента нагрузки Мс уменьшается. Небольшое случайное изменение Мс на низких скоростях приводит к значительному изменению скорости W. Это ограничивает диапазон регулирования Wmax/Wmin величиной допустимого изменения скорости при изменении момента нагрузки.
При номинальном моменте диапазон регулирования составляет от 3 до 4 (2...2,5 – [5,40]; не более 2 [10, 31]).
5) При уменьшении момента нагрузки уменьшается возможный диапазон регулирования скорости.
6) Введение дополнительных сопротивлений Rдоб уменьшает пусковой момент Мп=с0ФU/(Rя+Rдоб) и ток короткого замыкания Iк. з=U/(Rя+Rдоб). Это свойство используется при пуске двигателя для ограничения пусковых токов.
7) Значение сопротивления Rдоб, которое необходимо включить в цепь якоря, чтобы получить угловую скорость W показывает регулировочная характеристика W(Rдоб) (рис.25)
Рис.25. Регулировочные характеристики ДПТ независимого возбуждения при резистивном управлении. | Если при резистивном управлении необходимо получить скорость установившегося режима W при моменте нагрузки Мс, то добавочное сопротивление выбирается исходя из выражения: Rдоб = (с0Ф)2*(W0-W)/Мс - Rя (30) Следует заметить, что с увеличением Rдоб уменьшается КПД двигателя. |
Недостатки.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 |
