


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Электрический КПД – КПД, учитывающий только электрические потери цепи якоря [7].
С учетом (16) и (17):
Рэм = Р1 - DРэ = U Iя - Iя 2Rяц (20)
Рэм = hэ Р1
Из курса математики известно: чтобы определить экстремум функции, необходимо взять ее производную, приравнять выражение к нулю и решить полученное уравнение.
Максимальное значение электромагнитной мощности Рэ достигается при токе якоря, полученном из уравнения:
dРэм/dIя = U - 2Iя Rяц = 0 -
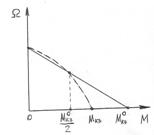
Наибольшая электромагнитная мощность развивается при токе якоря Iя = U/2Rяц (половина тока короткого замыкания). Подставив найденное значение в (20) получим:
Рэм макс=U2/(4Rя).
Ей соответствуют Р1=U2/(2Rя) ; DРэ= U2/(4Rя) и hэ = Рэм/Р1 = 0.5.
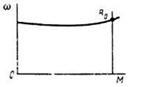
Рис.8. КПД и электромагнитная мощность | Следует обратить внимание, что в точке с максимальной электромагнитной мощностью КПД имеет не максимальное значение, и в обмотке якоря выделяются большие потери (рис.8). |
Номинальная мощность выбирается равной максимальному значению в следующих случаях:
- для ДПТ малой мощности (до 200 Вт).
Для таких двигателей низкий КПД и относительно большие потери не имеют существенного значения. Ограничением здесь выступает не условия нагрева, а развитие требуемой мощности в заданных габаритах. При этом достигается наилучшее использование электродвигателя по мощности при минимальном весе и габаритах. Электрический КПД таких двигателей равен 0,5, а полный КПД, вследствие механических и магнитных потерь, составляет от 0,2 в электродвигателях в несколько Ватт [7].
- для ДПТ, работающих в кратковременном и повторно-кратковременном режиме.
Отсюда следует, что при одной и той же мощности двигатель с длительным режимом работы должен иметь большие размеры (больший вес) [3].
Номинальная мощность выбирается равной значению, при которой достигается максимальный КПД:
- для ДПТ большой мощности.
У этих двигателей мощность потерь, приходящаяся на единицу внешней поверхности, значительно выше, чем у двигателей малой мощности. Поэтому относительная величина потерь в этих ЭД ограничивается допустимой температурой перегрева их частей.
Кроме того, для мощных двигателей существенное значение имеет величина потребляемой мощности, для снижения которых необходимо снижать потери.
Поэтому двигатели большой мощности стремятся проектировать на максимальный КПД.
Вследствие этого, номинальная мощность мощных ЭД меньше максимальной мощности, а номинальный КПД соответствует максимуму КПД [7].
2.11. Характеристики ДПТ
Основными статическими характеристиками, описывающими свойства электродвигателя в установившемся режиме, являются механическая, электромеханическая (скоростная), моментная и рабочие характеристики.
Названные характеристики называют естественными, если они построены при номинальном напряжении питания Uном, номинальном потоке возбуждения Фном и при отсутствии добавочных сопротивлений в цепи статора (Rдоб=0). Если хотя бы одно из перечисленных условий не выполняется, характеристика называется искусственной [28].
Особенности характеристик ДПТ связаны со способом возбуждения: главным образом, с тем, зависит или не зависит поток возбуждения от тока нагрузки.
2.11.1. ДПТ с независимым возбуждением
Уравнение электрического равновесия цепи якоря:
U= E+IяRя. ц, (21)
где Rя. ц – суммарное сопротивление цепи якоря (для ДПТ с НВ и ПарВ: Rя+Rдоб; для ДПТ с ПВ и СВ: Rя+ Rв +Rдоб). При этом сопротивление переходных контактов щеток 2∆u/Iя будем включать в Rя.
ПротивоЭДС двигателя
E = с0WФ (22)
С учетом (22) уравнение (21) примет вид:
U= с0WФ + IяRя. ц | (23) |
Выражение для электромеханической (скоростной) характеристики W(Iя):
W = U/(с0Ф) - IяRя. ц/(с0Ф) | (24) |
Электромагнитный момент двигателя
M=с0IяФ, | (25) |
где с0 = pN/(2pa) (см (3) и (10)). В литературе используются коэффициенты се и см, которые в системе СИ равны друг другу; для общего обозначения здесь введен коэффициент с0.
p – число пар полюсов, N – число проводников якоря; a – число параллельных ветвей обмотки якоря.
Зависимость электромагнитного момента двигателя от тока якоря (25) называется моментной характеристикой двигателя.
Выражение для механической характеристики получается из выражения (24) после подстановки в него Iя из выражения (25):
W=U/(с0Ф) - МRя. ц/(с0Ф)2 | (26) |
Как было отмечено в п.2.4, момент на валу ДПТ Мв меньше электромагнитного момента М. Поэтому даже в режиме холостого хода (когда Мв=0) двигателем должен быть создан момент холостого хода, а по обмотке якоря будет протекать ток (Iя= Iя0 = (3÷8)% от Iя. ном) [32].
Характерными точками на механической характеристике являются точка идеального холостого хода W0 = U/(с0Ф); М=0 и точка короткого замыкания W=0; Мкз = Мп = с0ФU/Rя. ц.
Скорость идеального холостого хода электродвигатель имеет в том случае, когда не только внешний нагрузочный момент, действующий на его вал, равен нулю, но и момент собственных потерь двигателя на холостом ходу равен нулю (М0=0) или скомпенсирован. Второе на практике можно осуществить, вращая включенный в сеть электродвигатель другим электродвигателем и добиваясь того, чтобы ток, потребляемый якорем первого двигателя, стал равным нулю [2].
Режим короткого замыкания в практике эксплуатации ДПТ с независимым и параллельным возбуждением недопустим, поскольку в цепи якоря при этом протекает большой ток (Iякз = U/Rяц) и в обмотке выделяется значительная тепловая мощность [10].
Величина, обратная коэффициенту при моменте в формуле (26), определяет жесткость механической характеристики β=dM/dW=(с0Ф)2/Rя. ц.
Жесткость характеризует крутизну механической характеристики и определяет статические свойства электропривода. От жесткости зависит, насколько изменится скорость вращения электропривода при изменениях нагрузочного момента [2]. При абсолютно жесткой механической характеристике скорость двигателя не зависит от нагрузки.
По жесткости механические характеристики (или участки характеристик) принято делить на три группы [2]:
1) абсолютно жесткие, когда β=¥.
2) жесткие, когда β=40÷10 Нм*с/рад
3) мягкие, при β<10 Нм*с/рад.
Жесткость естественной механической характеристики электродвигателя в сильной степени зависит от его мощности. У мощных двигателей магнитный поток Ф значительно больше, а сопротивление якоря R значительно меньше, чем у маломощных. Поэтому жесткость механических характеристик мощных электродвигателей велика, а маломощные имеют мягкие механические характеристики [2].
У ДПТ с НВ и ПарВ жесткость механической характеристики высока. Частота вращения при переходе от режима холостого хода к номинальному режиму уменьшается лишь на 2-8% от nном [14].
Влияние реакции якоря на вид характеристик ДПТ.
При отсутствии реакции якоря для ДПТ с независимым возбуждением (Ф=const) приведенные характеристики (24), (25), (26) имеют линейный характер. Механическая характеристика (26) представляет собой прямую линию, соединяющую точку идеального холостого хода и точку короткого замыкания.
В реальности допущение о неизменности магнитного потока не является грубым лишь при малых значениях момента нагрузки (тока) или при наличии компенсационной обмотки, устанавливаемой для повышения качества коммутации [31].
При увеличении нагрузки основной поток все более существенно искажается. Значение момента короткого замыкания с учетом реакции якоря заметно меньше, чем в случае линейной механической характеристики (рис.9).
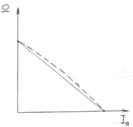
Уменьшение среднего значения потока под действием реакции якоря вносит искажения в линейный характер также и электромеханической (рис.10) и моментной характеристик (рис.11).
Рис.9. Механическая характеристика |
Рис.10. Электромеханическая характеристика |
Рис.11. Моментная характеристика |
Искажение линейности характеристик ДПТс НВ под действием реакции якоря |
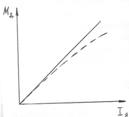
Если в качестве базовых величин принять момент и ток короткого замыкания, то реально моментная характеристика будет описываться соотношением
М/Мк=(Iя/Iя. к)m,
где степень m=0,7-0,9 для большинства ДПТ независимого и параллельного возбуждения [7].
Приведенный нелинейный характер моментной характеристики характеризует чувствительность ДПТ независимого и параллельного возбуждения к изменению момента нагрузки (небольшое изменение момента приводит к существенному изменению тока якоря) [7].
Рис.12. Мех х-ка ДПТ при сильном размагничивающем действии реакции якоря [34] | В мощных двигателях с независимым или параллельным возбуждением падение напряжения в цепи якоря мало и при больших токах якоря (в условиях довольно сильного насыщения зубцов якоря) размагничивающее действие реакции якоря может оказаться настолько сильно, что скорость двигателя с увеличением нагрузки (момента сопротивления и тока) возрастает (рис.12). На этом участке, в точке В работа двигателя неустойчива [34]. Для исключения области неустойчивой работы на полюсах помещают слабую последовательную обмотку возбуждения согласного включения, МДС которой составляет до 10% от МДС параллельной обмотки возбуждения [14], 1...3 витка. Поток этой обмотки компенсирует размагничивающее действие поперечной реакции якоря, благодаря чему механическая характеристика становится падающей [34]. Такую последовательную обмотку возбуждения называют стабилизирующей, а двигатель с такой обмоткой по-прежнему называется двигателем параллельного (или независимого) возбуждения [14]. |
2.11.2. ДПТ с параллельным возбуждением

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 |
