


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
а) Реостаты имеют большие габариты и массу.
Сопротивление Rдоб должно быть рассчитано на длительную работу (в отличие от пускового сопротивления).
б) Низкая энергетическая эффективность.
Выражение для тепловых потерь в цепи якоря двигателя можно записать в виде
ΔР=М(W0-W)=М2(Rя+Rдоб)/(с0Ф)2
С увеличением сопротивления Rдоб потери линейно растут и тем значительнее, чем более нагружен двигатель.
При уменьшении угловой скорости вдвое в реостате будет теряться 47,5% приложенного напряжения и столько же мощности, подводимой к цепи якоря [14].
Следует также отметить, что с уменьшением угловой скорости при самовентиляции ухудшается охлаждение двигателя.
в) Увеличение сопротивления цепи якоря приводит к увеличению электромеханической постоянной времени (Тм = Jдв(Rя+Rдоб)/(с0Ф)2), что замедляет переходные процессы в ЭД, то есть увеличивает время выхода на установившийся режим.
г) Регулирование частоты вращения при реостатном регулировании – ступенчатое, что обуславливается дискретным изменением сопротивления. Получение большого числа ступеней затруднено, так как требует большого количества коммутирующих аппаратов (контакторов) [40].
д) Большие броски потребляемого тока при переключении ступеней резисторов в случае релейно-контакторной системы управления, что вредно для питающей сети [26].
е) Сложность автоматизации [34].
Преимущества:
а) Простота технической реализации.
б) Основные потери выделяются в регулировочном сопротивлении, которое вынесено за пределы машины.
Область применения
Способ регулирования применяется лишь в двигателях малой мощности для привода исполнительных механизмов, где потери энергии не вызывают особых проблем с теплоотводом [15].
2.16.1.2. Особенности регулирования для ДПТ с последовательным возбуждением.
а) |
б) |
Рис.26. Схема (а) и характеристики (б) ДПТ с посл. возбуждением при реостатном регулировании (Rд2> Rд1) [40]. |
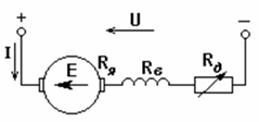
При регулировании скорости вращения ДПТ с последовательным возбуждением путем изменения сопротивления в цепи статора поток Ф не остается постоянным.
Регулирование целесообразно проводить при постоянном моменте сопротивления [31].
Диапазон регулирования для ДПТ с последовательным или смешанным возбуждением 1:4 [26], обычно не превышает 2,5:1 и зависит от нагрузки [31].
Область применения
Этот способ регулирования нашел широкое применение в крановых и тяговых электроприводах [31].
2.16.2 Регулирование скорости вращения ДПТ изменением потока (тока) возбуждения.
2.16.2.1. ДПТ с независимым и параллельным возбуждением
Рис.27. Типичная усредненная кривая намагничивания ДПТ [40]. | Говоря о токе возбуждения Iв необходимо иметь ввиду следующее: 1) Сечение ОВ выбирается исходя из допустимого нагрева обмотки при протекании по ней номинального тока возбуждения. Длительное превышение током этого значения приведет к перегреву двигателя. 2) В большинстве случаев элементы магнитопровода электрических машин уже при номинальном потоке близки к насыщению (рис.27). Поэтому даже незначительное повышение потока выше номинального значения может быть обеспечено только за счет существенного увеличения тока возбуждения, что является крайне неэффективным. Отсюда вытекает первая особенность данного способа регулирования (см. ниже). |
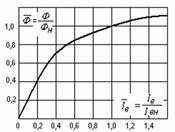
Рис.28. Переходные процессы в ДПТ при изменении тока возбуждения [25] | При уменьшении Iв поток Ф становится меньше. Вследствие инерции вращающихся частей скорость вращения W в первый промежуток времени остается почти постоянной, и ЭДС Е=с0ФW. уменьшается. Это приводит к увеличению тока якоря Iя=(U–E)/R, причем даже небольшое уменьшение Е дает относительно большое увеличение тока Iя, так как значения U и Е мало отличаются одно от другого. Например, при уменьшении Ф на 5% ток якоря может возрасти на 100%. Поэтому резких изменений тока возбуждения допускать нельзя. Момент M=с0IяФ, развиваемый двигателем, повышается, потому что Iя увеличивается больше, чем уменьшается Ф. Увеличение М приводит к увеличению скорости вращения W (М-Мс = JdW/dt). При ее увеличении будет возрастать ЭДС Е, следовательно, будут уменьшаться Iя и М. Режим устанавливается при более высокой скорости вращения, при которой момент двигателя М будет равен моменту нагрузки Мс [33]. |

Особенности регулирования:
1) Регулирование скорости осуществляется только при снижении потока возбуждения Ф (ослаблении магнитного поля).
а)*** |
б)*** |
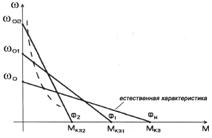
Рис.29. Механическая (а) и электромеханическая (б) характеристики ДПТ при различных магнитных потоках (Ф2 <Ф1 < Фн) [31]. |
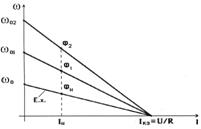
2) Регулирование однозонное вверх от номинальной скорости.
3) С уменьшением потока возбуждения Ф возрастает скорость идеального холостого хода W0 = U/(с0Ф).
4) С уменьшением потока возбуждения Ф ток короткого замыкания Iякз=Uя/Rя остается постоянным, а момент короткого замыкания Мкз=с0ФIкз снижается.
5) С уменьшением потока возбуждения Ф жесткость механических характеристик уменьшается: b=DМ/DW= (с0Ф)2/Rяц
Тем не менее с учетом большого значения Iк. з = (20-50)Iн характеристики достаточно жесткие, и стабильность скорости относительно высокая [40].
6) Диапазон регулирования скорости при изменении потока возбуждения обычно не превышает 2,5 (не более 3 [10], не превышает 2-3 [16]; 3-4 [40]; для двигателей специального исполнения может достигать 10, но обычно составляет 2 [31]).
Нижний предел скорости (верхний предел потока) ограничивается насыщением магнитной цепи. На практике нижней границей диапазона регулирования обычно является номинальная скорость вращения.
Верхний предел скорости ограничивается [32]:
- механической прочностью машины;
- условиями устойчивости;
- увеличением искажающего действия реакции якоря;
- условиями коммутации:
--- ростом вибрации щеточно-коллекторного узла;
--- ростом реактивной ЭДС и увеличением искрения на коллекторе.
--- вследствие увеличения максимального напряжения между коллекторными пластинами в результате ослабления основного поля и усиления при этом искажающего влияния поперечной реакции якоря.
Преодоление ограничений (специальное исполнение ДПТ):
Если двигатель с параллельным возбуждением предназначается для широких пределов регулирования скорости вращения (например, 4:1) путем изменения тока возбуждения, то при ослабленном поле возбуждения реакция якоря может оказаться слишком сильной. Тогда необходимо для уменьшения реакции якоря выполнить двигатель с увеличенным воздушным зазором. Такие двигатели стоят дороже, чем нормальные двигатели с пределами регулирования скорости вращения примерно 1:1,5 [33].
Другой вариант используется в машинах малой и средней мощности с волновой обмоткой якоря - раздельное питание катушек возбуждения отдельных полюсов. При этом в одной группе полюсов сохраняют Iв = const и большой поток со значительным насыщением участков магнитной цепи, а в другой группе полюсов Iв и поток уменьшают. Искажающее влияние поперечной реакции якоря под первой группой полюсов в этом случае будет проявляться значительно слабее. Так как в волновой обмотке напряжение между соседними коллекторными пластинами складывается из ЭДС секций, расположенных под всеми полюсами, то в результате такого регулирования потока полюсов распределение напряжения между пластинами будет более равномерным [14].
7) Ток якоря не может длительно превышать номинального значения, на который рассчитаны обмотки. В связи с тем, что регулирование скорости достигается уменьшением магнитного потока, с увеличением скорости должен уменьшаться допустимый момент нагрузки: Mдоп=с0ФIном<Мном (штриховая линия на рис.29а).
Из уравнения (4), при Iя = Iдоп = Iном следует:
с0Ф = Uном–IномRя/W
и Мдоп= (Uном–IномRя/W)*Iном
или Рдоп= МдопW= Uном Iном– Iном2Rя = const.
то есть при данном способе регулирования неизменна допустимая мощность, снимаемая с вала машины.
При регулировании с Р=const при прочих равных условиях достижимый диапазон регулирования будет тем меньше, чем больше высота оси вращения и выше номинальная скорость.
В ряде случаев повышение скорости вращения может быть обеспечено только при снижении мощности двигателя ниже номинальной [22].
Регулировочная характеристика
Рис.30. Семейство регулировочных характеристик W (Фв) при Мн = const [12]. | В режиме идеального холостого хода (М=0) угловая скорость изменяется обратно пропорционально потоку (имеет вид гиперболы) и угловая скорость стремится к бесконечности. В реальном двигателе эта скорость ограничена, так как в двигателе всегда действует момент трения [28]. Рабочим участком регулировочной характеристики является участок, на котором при снижении потока происходит увеличение скорости вращения. Уравнение механической характеристики запишем в виде W=(Uс0Ф - МRя)/(с0Ф)2 При Мн = const, скорость W=0 при Ф = МRя/(с0U). Значение Ф, при котором W=Wмакс, можно определить продифференцировав правую часть механической характеристики по Ф и приравняв производную к нулю: Ф(Wмакс) = 2МRя/(с0U) Подставив найденное значение Ф в уравнение механической характеристики, определим Wмакс = U2/ (4МRя) |
Достоинства:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 |
