


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
При питании от источника большой мощности характеристики двигателя ничем не отличаются от характеристик ДПТ с независимым возбуждением.
В маломощном электроприводе часто мощности источника питания и двигателя соизмеримы, поэтому при увеличении нагрузки может снижаться напряжение источника. Этот же эффект имеет место и при малой частоте вращения, в режимах, близких к точке пуска. В результате снижения напряжения в ДПТ с параллельным возбуждением уменьшается ток возбуждения и поток, что уменьшает пусковой момент по сравнению со случаем питания от мощной сети [16] .
Ни в коем случае нельзя допускать разрыва цепи параллельного или независимого возбуждения. В этом случае поток возбуждения исчезает не сразу, а поддерживается индуктируемыми в ярме вихревыми токами. Однако этот поток будет быстро уменьшаться и скорость n будет сильно увеличиваться («разнос» двигателя). В результате ток якоря значительно возрастет и возникнет круговой огонь, вследствие чего возможно повреждение машины, и поэтому, в частности, в цепях возбуждения не ставят предохранителей и выключателей [32].
2.11.3. ДПТ с последовательным возбуждением
Особенности ДПТ с ПВ
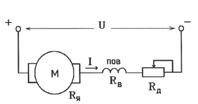
Рис.13. Схема ДПТ с последовательной ОВ [31].*** | - поток явным образом является функцией тока нагрузки Ф=f(Iя) (а не только через реакцию якоря как в ДПТ независимого возбуждения); таким образом изменение момента нагрузки Мс (а значит, и тока якоря Iя) сопровождается изменением потока Ф. - активное сопротивление якорной цепи включает в себя сопротивление ОВ Rя. ц=Rя+Rдоб+Rв. Для снижения сопротивления цепи якоря последовательную обмотку возбуждения выполняют маловитковой с низким активным сопротивлением [10]. |
Выражение для механической характеристики
Выведем приближенное аналитическое выражение механической характеристики для ненасыщенного ДПТ с последовательным возбуждением. В этом случае Ф=kIя.
В реальности при I>(0,8÷0,9)Iном вследствие насыщения магнитной цепи k начинает уменьшаться [14].
М = с0kIя2
E= с0kIяW
U = с0IяW + IяRя. ц
Iя = U/(Rя. ц+с0kW)
М = с0kU2/(Rя. ц+с0kW)2
 (27)
(27)
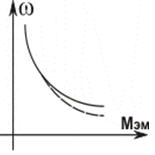
Основные статические характеристики ДПТ с последовательным возбуждением приведены на рис. 14.
а) |
б) |
Рис. 14. Механическая (а), моментная М(I) и электромеханическая (б) характеристики ДПТ последовательного возбуждения [40]. Обозначение R/kα следует читать как Rяц/с0k |
Особенности характеристик ДПТ с ПВ
1) При сделанных допущениях механическая характеристика представляет собой гиперболу: скорость вращения ДПТ последовательного возбуждения находится в обратной зависимости от электромагнитного момента.
2) При уменьшении момента сопротивления до нуля скорость вращения неограниченно возрастает, что недопустимо по условиям механической прочности.
Говоря же о реальных двигателях, следует отметить:
- даже в режиме идеального холостого хода существует остаточный магнитный поток Фост, вследствие чего скорость идеального холостого хода W0 будет иметь конечную величину и определяться выражением: W0 = U/(c0Фост). Величина Фост незначительна и W0 может достигать значительных величин [31].
- в режиме реального холостого хода момент сопротивления, включающий в себя и внутренний момент сопротивления собственно двигателя, не может стать равным нулю, но его уменьшение все же может вызвать недопустимое повышение скорости вращения [31].
Поэтому у ДПТ с ПВ, как правило, запрещается сбрасывать нагрузку на валу более чем на 80% от номинальной [31].
В силу тех же причин не допускается соединение ДПТ с ПВ с приводимым в движение механизмом ременной передачей: Валы должны соединяться жестко: муфтой или зубчатой передачей [39].
Исключением являются микродвигатели, у которых и при полном сбросе нагрузки остаточный момент трения достаточно велик для того, чтобы ограничить скорость холостого хода. Склонность ДПТ с ПВ идти в "разнос" ведет к тому, что их роторы выполняются механически усиленными [31].
Ограничение скорости ДПТ последовательного возбуждения при его запуске на холостом ходу может быть осуществлено включением добавочного резистора (на рис.13 – Rд) для повышения Rяц и включением двигателя на пониженное напряжение [2].
3) Пусковой момент ДПТ с последовательным возбуждением при отсутствии насыщения пропорционален квадрату напряжения и обратно пропорционален квадрату сопротивления цепи якоря [2]:
Мп= с0kIп2 = с0kU2/Rя. ц2 (28)
Поэтому при одном и том же допустимом токе Iп=Iдоп пусковой момент ДПТ с ПВ больше, чем пусковой момент ДПТ с НВ [31].
4) При увеличении момента нагрузки мощность, развиваемая ДПТ с ПВ (Р=WМ) с учетом зависимости (8) Р » sqrt(М), а в ДПТ с НВ Р » М. Таким образом, у двигателей последовательного возбуждения при изменении момента нагрузки Mc в широких пределах мощность изменяется в меньших пределах, чем у двигателей параллельного возбуждения. Поэтому для двигателей последовательного возбуждения менее опасны перегрузки по моменту [32].
5) (уточнение к п.1, п.3 и п.4).
Рис.15. Отличие мех. х-ки ДПТ с ПВ при учете насыщения [28]. | В реальных ДПТ с ПВ в области больших моментов, то есть при больших токах якоря (а значит, и возбуждения), имеет место насыщение магнитной цепи (большой поток). А в при насыщенном магнитопроводе Ф»const. Это обуславливает прямую пропорциональность между моментом и током, поэтому механическая характеристика на этом участке становится практически линейной. Сказанное относится и к режиму пуска. Поэтому в действительности (с учетом насыщения) пусковой момент приблизительно пропорционален питающему напряжению [2]. |
6) Механическая характеристика асимптотически приближается к значению W=– Rя. ц/с0k.
7) Жесткость механической характеристики β=dM/dW=(с0Ф)2/Rя. ц двигателя последовательного возбуждения переменна и возрастает с увеличением нагрузки [40].
На рабочем участке характеристика ДПТ с ПВ – мягкая.
Для авиационных двигателей последовательного возбуждения мощностью от 100 Вт до 3 кВт получены следующие приближенные эмпирические формулы, определяющие кратность пускового момента μ=Мп/Мном и значение номинального тока [2]:
μ=0,5+1,57*lgPном;
Iном=7,1*10-2*Рном.
2.11.4. ДПТ смешанного возбуждения
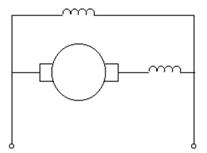
Cодержит две обмотки возбуждения: параллельную и последовательную (рис.16а).
Одна из обмоток является основной, другая — вспомогательной. Основной обмоткой считается та, которая создает не менее 70% всей МДС машины (F=Iw) [42].
Параллельная и последовательная обмотка могут быть включены согласно (когда Фв. сум=Фв. пар+Фв. пос; т. е. поток с увеличением нагрузки увеличивается) и встречно (Фв. сум=Фв. пар–Фв. пос; т. е. поток с увеличением нагрузки будет уменьшаться).
а) |
б) |
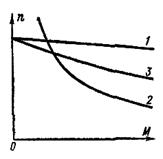
Рис.16 Схема (а) [-] и механические характеристики ДПТ смешанного возбуждения (б) в сравнении с механическими характеристиками ДПТ с другим возбуждением): 1 - мех. х-ка ДПТ с НВ и 2 – мех. х-ка ДПТ с ПВ, 3- мех. х-ка ДПТ СВ [32]. |
Если обмотки включены встречно, то с ростом нагрузки суммарный магнитный поток Ф будет уменьшаться и скорость вращения повышаться, становясь при нагрузке большей, чем при холостом ходе [42]. Работа ДПТ при этом обычно неустойчива, и двигатели с встречным включением последовательной обмотки возбуждения не применяются [32].
В ДПТ СВ, применяющихся на практике, основной обмоткой возбуждения является параллельная обмотка, а последовательная обмотка включается встречно. МДС параллельной ОВ в номинальном режиме составляет более 70% от суммарной МДС [39], что соответствует потоку холостого хода Ф0=(0,8-0,85)Фн и скорости идеального холостого хода Ω0 =(1,3-1,4) Ωн [25].
Такой двигатель имеет более мягкую механическую характеристику по сравнению с двигателем параллельного возбуждения, но более жесткую по сравнению с двигателем последовательного возбуждения (рис.16б) [31]. Чем больше число витков в согласно-включенной последовательной обмотке, тем мягче получается механическая характеристика двигателя [19].
Важным преимуществом в сравнении с двигателем последовательного возбуждения является то, что при малых нагрузках и даже при холостом ходе двигатель смешаного возбуждения имеет ограниченную частоту вращения [39]. Скорость идеального холостого хода определяется магнитным потоком, обусловленным действием параллельной ОВ.
2.12. Характеристики ДПТ при питании от источника тока
В ряде применений якорная цепь ДПТ независимого возбуждения питается не от источника напряжения, а от источника тока (Iя=const) – рис.17.а. При этом свойства электропривода радикально изменяются. Электромеханическая W(Iя) и механическая W(M) представляют в данном случае вертикальные прямые (рис.17б): Iя = const ; М=с0ФIя = const [40].

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 |
