


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
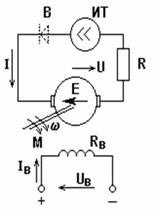
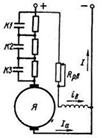
Привод приобретает новое свойство "источника момента". Это связано с тем, что источник питания – источник тока – нейтрализует действие ЭДС, она теперь уже не играет роли внутреннего регулятора и не влияет на скорость. В свою очередь, напряжение U становится зависимой переменной (рис.17б): U= E+IяRяц = с0WФ+IяRяц и характеристика W(U) определяет энергетические режимы работы электропривода [40].
|
|
Рис.17. Схема (а) и характеристики (б) ДПТ НВ при питании от источника тока [40] |
 а)
а) б)
б)Режима идеального холостого хода в рассматриваемой структуре нет [40].
Двигательный режим соответствует участку ab [40].
Режим короткого замыкания – точка a, здесь Е = 0 и U = IR [40].
Участок ac соответствует торможению противовключением [40].
В точке с - U = 0 – режим динамического торможения: вся поступившая механическая энергия рассеивается в сопротивлениях якорной цепи [40].
Участок cd соответсвует режиму рекуперативного торможения (если источник тока позволяет передать энергию в сеть). Если источник тока обладает односторонней проводимостью (пунктир на рис.17б) этого режима не будет, и электропривод будет продолжать работать в режиме динамического торможения (пунктир на рис.17б) [40].
2.13. Рабочие характеристики ДПТ
Рис.18 Рабочие характеристики ДПТ [33]. | Рабочие характеристики двигателя – это зависимости частоты вращения n, электромагнитного момента Мэм., тока якоря I (иногда потребляемой мощности), КПД η от мощности на валу двигателя P2=M2W при номинальном напряжении питания и отсутствии добавочных сопротивлений (рис.18). КПД. Кривая КПД имеет типичный для всех электрических машин характер. При отсутствии нагрузки (P2 =0) КПД равен нулю. В диапазоне изменений нагрузки от 0 до 0,5P2ном наблюдается достаточно интенсивный рост КПД до максимального значения. Затем по мере дальнейшего роста нагрузки имеет место плавное снижение КПД с сохранением сравнительно высокого значения в области номинального значения нагрузки. При перегрузках КПД значительно снижается, поскольку рост потерь, например, в меди - Iя2R , опережает рост мощности (даже потребляемой - U Iя). [29]. |
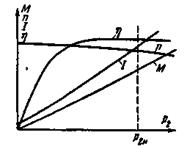
Момент. Одновременно с увеличением мощности на валу Р2 растет и момент на валу М. Поскольку с увеличением Р2 и М скорость п несколько уменьшается, то М = Р2/п растет несколько быстрее Р2 (выгибаясь вверх).
Ток якоря. Ток якоря при холостом ходе отличен от нуля, так как двигатель затрачивает мощность на покрытие потерь на трение в подшипниках и скользящем контакте. С ростом мощности (момента) ток увеличивается [16]. Для ДПТ с НВ и ПВ, у которых частота вращения с ростом нагрузки уменьшается незначительно, зависимость тока близка к линейной и лишь слегка выгибается вверх [28].
Управление ДПТ
Управление ДПТ можно разделить на следующие операции:
- управление ДПТ при пуске;
- изменение направления вращения (реверсирование);
- регулирование или стабилизация скорости вращения в установившемся режиме;
- управление двигателем при торможении.
2.14. Пуск ДПТ
При пуске двигателя необходимо [14]:
1) Обеспечить пусковой момент, достаточный для достижения необходимой скорости вращения за требуемое время.
2) Предотвратить возникновение чрезмерного пускового тока, опасного для двигателя.
То есть, наиболее простым образом обеспечить требуемую кратность пускового момента при возможно меньшей кратности пускового тока [28].
Кроме того, часто предъявляются и другие требования, обусловленные спецификой электропривода, например:
- плавность пуска (важно, например, для транспорта) [34];
- высокий КПД двигателя при пуске [34].
Пуск ДПТ с ПВ должен осуществляться только при наличии момента сопротивления Мс [39].
Прямой пуск при номинальном напряжении питания
Цепь якоря ДПТ подключается непосредственно к сети на ее полное напряжение.
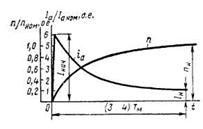
Рис.19. Изменение тока и частоты вращения ДПТ с НВ при прямом пуске [34] | В момент пуска угловая скорость вращения W, а следовательно, и противоЭДС Е равны нулю. Вследствие этого, пусковой ток при прямом пуске Iя. п=Uп/Rя. ц . Здесь мы пренебрегаем влиянием индуктивности цепи якоря, которая несколько уменьшает пусковой ток в начальный период [33]. Пусковой ток может в десятки раз превышать номинальный ток: (10...20) Iя. ном [34], (10...30) Iя. ном [38], (10...50) Iя. ном [32]. Такое же соотношение имеют пусковой и номинальный моменты двигателя. |
Негативные явления при прямом пуске.
1) Якорная обмотка может быстро перегреться (и выйти из строя) (особенно при частых пусках) [31].
2) Большие токи могут привести к сильному искрению под щетками (и выходу из строя электродвигателя) [34].
3) Большие токи могут повлиять на сеть и работу других потребителей при ее ограниченной мощности
4) Большой пусковой момент при выборке люфтов в зацеплениях редуктора, может привести к значительным ударным нагрузкам на его элементы [10].
Поэтому прямой пуск используют только для ДПТ малой мощности (не превышающей нескольких сотен ватт) [19,32,34].
У ДПТ малой мощности:
- сопротивление якорной цепи относительно велико. Это ограничивает пусковой ток: Iп ≤ (4÷6) Iном) [32];
- вал ротора имеет избыточный запас прочности (ударное приложение пускового момента не приводит к его поломке) [16];
- длительность пуска мала (время действия больших токов непродолжительно), не более 1-2 с [32].
В отдельных случаях прямой пуск применяется для двигателей с последовательным возбуждением мощностью в несколько киловатт [34] (значительное сопротивление цепи якоря Rя. ц, включающее в себя сопротивление последовательной ОВ). При прямом пуске таких двигателей Iп = (4÷6)*Iя. ном[34].
Чаще, чтобы не вывести из строя двигатель, пусковой ток необходимо ограничивать. Согласно выражению Iяп=Uп/Rя. ц это можно делать при увеличении сопротивления цепи якоря за счет введения регулируемого добавочного сопротивления Rдоб или при пуске двигателя при пониженном напряжении источника питания.
Начальные значения пусковых параметров выбираются таким образом, чтобы начальный пусковой ток не превышал заданного максимального значения Iп. макс [14,32,34].
Так как время пуска сравнительно невелико, то Iп. макс берут несколько больше номинального значения Iном:
- для машин большой и средней мощности Iп. макс = (1,4 ÷ 1,7) Iном;
- для машин малой мощности Iп. макс = (2,0 ÷ 2,5) Iном.
Ввод добавочного сопротивления
Способ распространен в нерегулируемом приводе [28].
а) б) |
|

 в)
в)Рис. 20. Схема пуска ДПТ с ПарВ с помощью пускового реостата (а) и пусковых сопротивлений (в), схема пуска ДПТ с ПВ (б) [25,14].
Перед пуском (t < 0) подвижный контакт П (рис.20а) стоит контакте 0 (цепь двигателя разомкнута). В начальный момент пуска (t = 0) подвижный контакт П переводится на контакт 1, и через якорь пойдет ток Iя.
Значение пускового тока
Iп=Uп/(Rя+Rдоб1) ![]() Iмакс.
Iмакс.
Если Мп=с0ФIп > Мс, то двигатель придет во вращение и скорость n будет расти (рис.21).
Рис.21. Зависимость М, Iа и n от времени при реостатном пуске [14] |
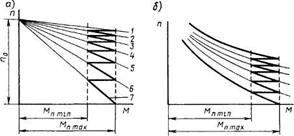
Рис.22. Изменение момента при реостатном пуске двигателей с параллельным (а) и последовательным (б) возбуждением [34] |
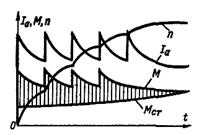
По мере разгона якоря в его обмотке увеличивается противоЭДС Е, в связи с чем уменьшается ток якоря
Iя = (Uп-E)/(Rя+Rдоб1),
Одновременно с уменьшением тока уменьшается и момент двигателя, а, следовательно, и ускорение двигателя dW/dt=(M-Mc)/J.
Когда Iя достигнет значения Iя. мин = (1,1 ÷ 1,3) Iном, контакт П пускового реостата переведется на контакт 2 (рис.20а). Вследствие уменьшения Rдоб ток Iя ввиду малой индуктивности цепи якоря почти мгновенно возрастет, М также увеличится, n будет расти быстрее и в результате увеличения противоЭДС Е величины Iя и М снова будут уменьшаться (рис.21), Подобным же образом развивается процесс пуска при последовательном переключении реостата в положения 3, 4 и 5, после чего двигатель достигает установившегося режима работы [32].

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 |
