


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral

1) 
2) 


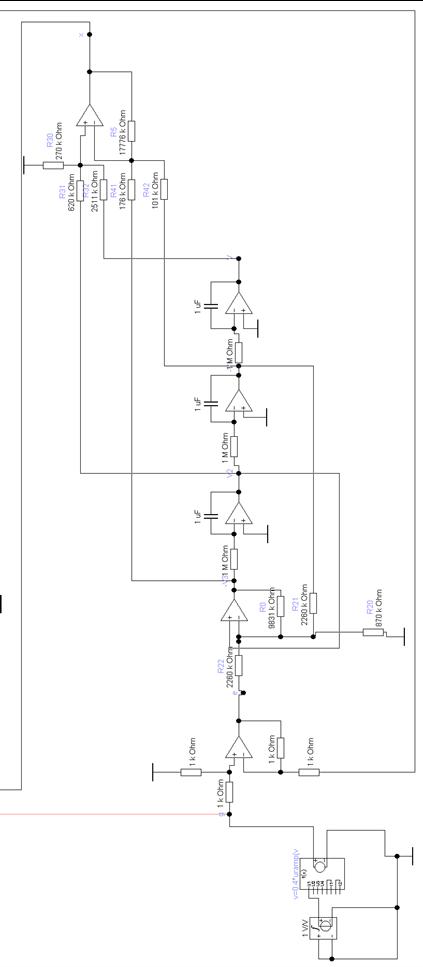
После приведенных выше расчетов можно построить схему с определенными коэффициентами (рис. 12.16).
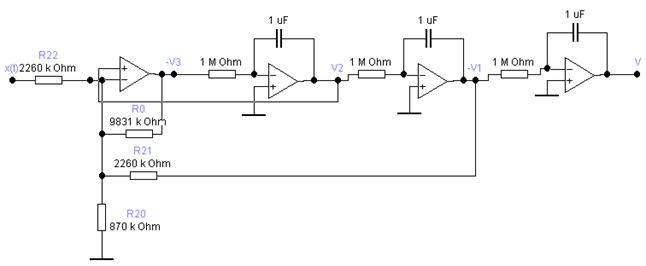
рис. 12.16
Теперь рассчитаем схему для полинома BR(s).


 ;
;  ;
; 

1) 

2) 

После приведенных выше расчетов можно построить схему с определенными коэффициентами (рис. 12.17).
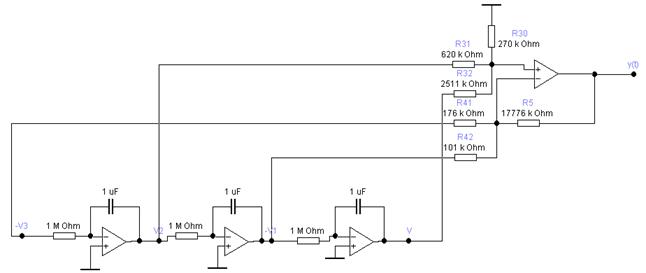
рис. 12.17
После этого необходимо соединить эти две схемы последовательно, как показано на рис. 12.14. А затем сделать ООС. Сделаем вычитатель на ОУ (рис. 12.18): e = g – y, где e – установившаяся ошибка, g – сигнал от генератора, y – выходной сигнал.
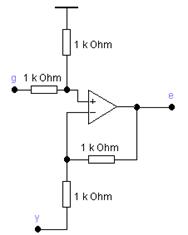
рис. 12.18
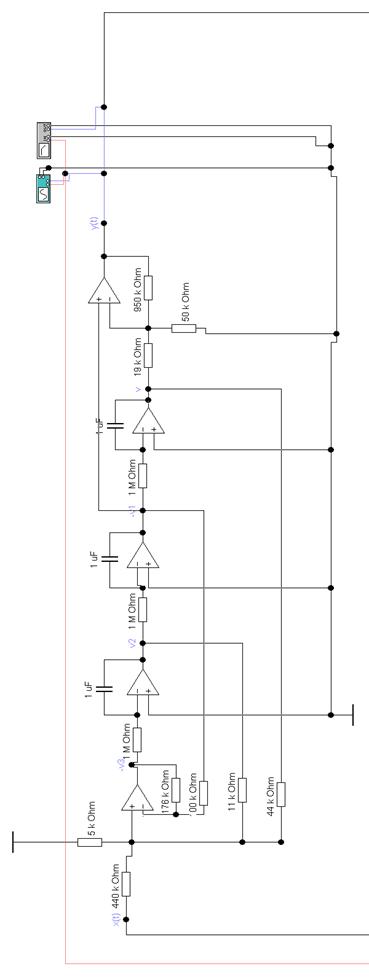
Теперь соединим все три части, добавим генератор прямоугольных импульсов и запишем туда форм.20).
![]()
![]()
Теперь включим моделирование и получим с экрана осциллографа реакцию на входной сигнал (рис. 12.21). По сравнению с рисунком в главе 7 (рис.7.12) система стала быстрее и точнее реагировать на изменение входного сигнала и почти сразу догоняет его – в течение 7 – 8 сек (худший показатель). Такого результата добились благодаря воздействию ан разомкнутую систему последовательного регулятора, а также преобразования ее в замкнутую с ООС.
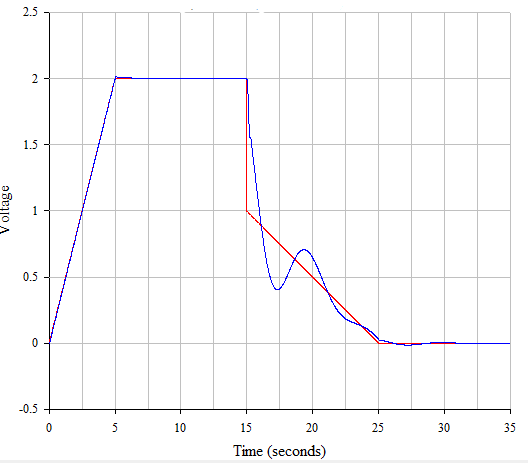
рис. 12.21
Также возможно сделать расчет замкнутой системы с последовательным регулятором и построить функции входного и выходного сигналов в «Mathcad». Сделаем такие же действия как и в п.10, но в начале впишем ПФ замкнутой системы (рис. 12.22). Затем построим график x(t) и y(t) (рис. 12.23).
![]()
![]()
рис. 12.22
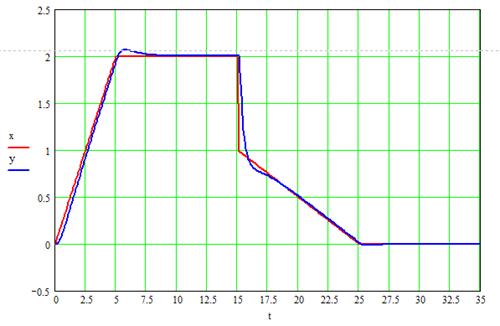
рис. 12.23
После построения графика видим, что реакция немного отличается.
13. Исследование замкнутой системы с ПИД-регулятором
Пропорционально-Интегрально-Дифференциальный регулятор имеет следующую формулу
![]()
Данная формула позволяет данному устройству, будучи установленным последовательно с некоторым звеном подавать на него разного рода управляющие воздействия.
На примере программы MatCADa изучим по возможности реакцию передаточной функции на разного рода воздействия.
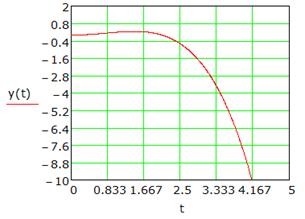
Присвоим пропорциональному и дифференциальному коэффициенту значение 1, а интегральный оставим нулевым. При этом получим следующую ПХ
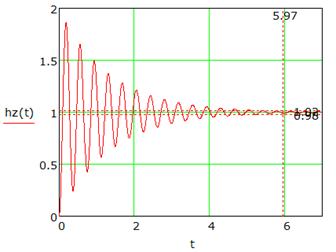
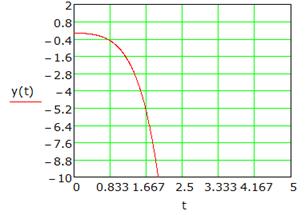
Как видно из рисунка, данная система имеет время установления 5.97с. Изменим дифференциальный параметр с 1 на 10.
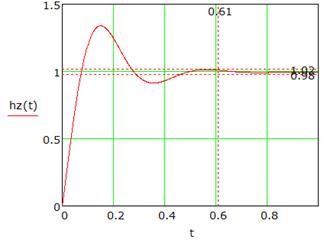
При этом время установления уменьшается примерно в 10 раз.
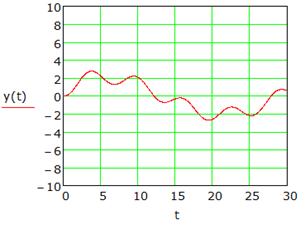
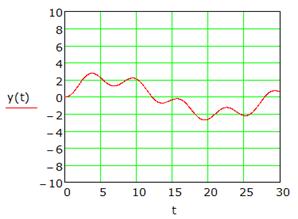
К сожалению, не удалось подобрать никаких других значений К для ПИД-регулятора, таких, чтобы выводилась корректно ПХ замкнутой системы. Попробуем изучить действие каждого из коэффициентов на примере вывода сигнала. Установим все К равными 1 и построим график выходного сигнала – реакцию системы при подаче на вход нетиповой последовательности.
График выходного сигнала
Теперь изменим знак пропорционального коэффициента на отрицательный и пробуем отследить изменения в сигнале на выходе.
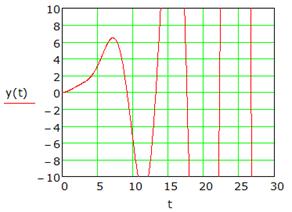
Как видно из графика отрицательный пропорциональный коэффициент привёл к образованию правого корня
![]()
Данные корни вывели выходной сигнал из устойчивости. Теперь присваиваем отрицательный знак интегрирующему коэффициенту.
При всех 3-х отрицательных коэфициентах
Отрицательный интегрирующий и отрицательный дифференцирующий параметры также приводит к неустойчивости выходного сигнала.
Увеличим модуль пропорционального коэффициента в несколько десятков раз
Как видно из графика пропорциональный коэффициент не привёл к резкому увеличению амплитуды выходного сигнала. Это связано с тем, что данный коэффициент присутствует и в числителе, и в знаменателе ПФ.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
