


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
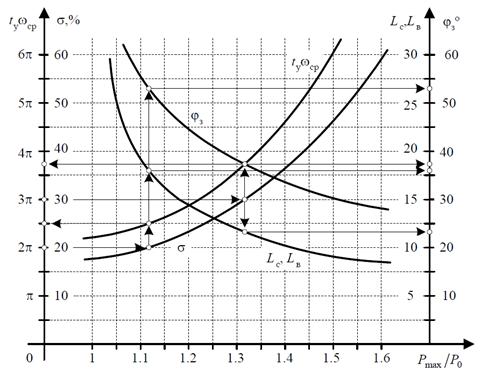
рис. 11.3
· Выбираем по левой стороне внутреннюю шкалу (σ,% - перерегулирование), выбираем на ней необходимый запас – 20%, затем доходим до графика σ, ему в этой точке соответствует число Pmax/P0 ≈ 1.12. Последнему числу на графике ty*ωср соответствует по шкале ty*ωср число 2.5*π (рис. 11.4).
· Рассчитываем ωср по формуле ty*ωср/ tyж:
![]()
рис. 11.4
· Затем выбираем число на графике Lc, Lb соответствующее взятому Pmax/P0 ≈ 1.12. Оно равно 18дБ, следовательно, Lc = Lb = 18дБ. Из этого значения рассчитываем ωс и ωв (рис. 11.5). Здесь νс – коэффициент астатизма, в нашем случае н равен единице. Т. к. с0 = 1, а c1 ≈ 0.
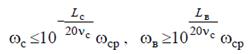
рис. 11.5
ωс ≤ 0.4, а ωв ≥ 25.
· Отсюда следует, что коэффициенты необходимые для вычисления желаемой передаточной функции можно рассчитать следующим образом: Tc = 1 / ωc = 1 / 0.4 = 2.5; Tв = 1 / ωв = 1 / 25 = 0.04; Kж = 1 / с1ж = 1 / 0.1 = 10.
· На графике (рис. 11.6), который строится по вышеприведенным расчетам, есть область между низкочастотной и среднечастотной, в которой необходимо соединить соответствующие участки графика. Соединяющий участок строится от частоты ωc, с наклоном в -40дБ, т. к. расстояние между ними достаточно большое, а соединяющий участок должен быть как можно меньше. В точке, где соединяющий участок пересекается с низкочастотным участком, обозначается частота ωн. Также необходимо вычислить Tн, для этого по графику узнать частоту ωн. Из графика видно, что ωн = 0.1, следовательно, Tн = 1 / ωн = 1 / 0.017 = 59.
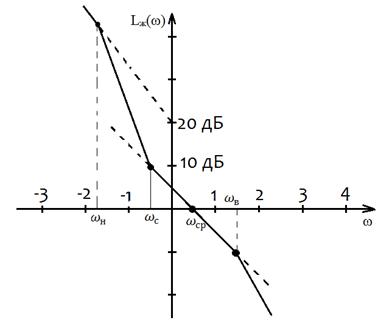
рис. 11.6
3) Третьим шагом необходимо восстановить Wж(s) по коэффициентам рассчитанным выше. Формула для желаемой передаточной функции (рис. 11.7). В результате подстановки получаем Wgel(s).
![]()

рис. 11.7
4) Для расчета передаточной функции последовательного регулятора необходимо рассчитать R(s) по формуле на рисунке. Подставляем передаточные функции и получаем результат (рис. 11.8).
![]()


рис. 11.8
12. Исследование замкнутой системы управления с последовательным регулятором.
Рассчитать переходную характеристику hз(t) замкнутой системы управления с регулятором, измерить ее фактические показатели качества и сравнить их с желаемыми. Если желания не исполнились, то вернуться в п. 11. Построить схему моделирования замкнутой системы с окончательно рассчитанным последовательным регулятором на ОУ. Проанализировать выходной сигнал yз(t) слежения замкнутой системы за входным сигналом x(t), заданным в табл. 3.
12.1. Расчет переходной характеристики замкнутой системы, управляемой регулятором.
В программе «Mathcad» строим переходную характеристику hз(t) по формуле замкнутой системы с желаемой передаточной функцией Wz(s).
![]()
![]()
рис. 12.1
Далее строим график hз(t) (рис. 12.2). Отмечаем на графике 5% отклонение от входного графика. Если входной сигнал – единичная ступенчатая функция, то отклоните в 5% это ±0.05. При этом мы видим на графике фигуру похожую на трубу, если график входит в эту трубу, значит, он сошелся к константе, в нашем случае – единице. Время установления примерно равно 11с, а перерегулирование больше 20%.
рис. 12.2
Из графика видно, что желаемые показатели не были достигнуты, следовательно, необходимо вернуться к пункту 11 и повторить вывод желаемой передаточной функции функции последовательного регулятора.
12.2. Вывод передаточной функции последовательного регулятора.
Вспомним функцию, которая была выведена для последовательного регулятора в п. 11 (рис. 12.4). Для того чтобы построить по этой функции схему в EWB хотелось, чтобы полиномы в числителе и знаменателе были как можно меньшей степени. Для этого посмотрим внимательно на функцию R(s) и попытаемся найти скобки, которые можно было бы сократить. Таких нет, но возможно небольшое изменение ПФ Wж(s) следующим образом. В числителе мы видим выражение (1 +0.62 * s), в то же время в числителе ПФ разомкнутой системы есть выражение (1.4 *s + 1). Таким образом, в желаемой ПФ можно заменить существующее выражение на (1.4 *s + 1). Затем рассчитать все характеристики, вычислить снова Wж(s), построить графики hз(t), ЛФЧХ и ЛАЧХ, а в конце проверить желаемые характеристики.
Вычисление Wж(s):
· Из множи*s + 1) в числителе делаем вывод, что Tc = 1.4, следовательно, ωс = 0.71 рад/с, что соответствует выдвинутому ранее требованию (ωс ≤ 1.61 рад/с). Чтобы отметить на логарифмическом графике, делаем вычисления lg(0.71) = -0.14 и отмечаем точку на графике.
· Коэффициент ωср поднимаем до 24 рад/с, Кж оставляем равным 10, а Tв пересчитываем по графику. ωв из графика равно 25 рад/с, следовательно, Tв = 0.04. Коэффициент T2 таже необходимо пересчитать по графику (рис. 12.8). Из него видно, что ωн = 10-0.65 = 0.22 рад/с, следовательно, Т2 = 1/0.22 = 4.55.
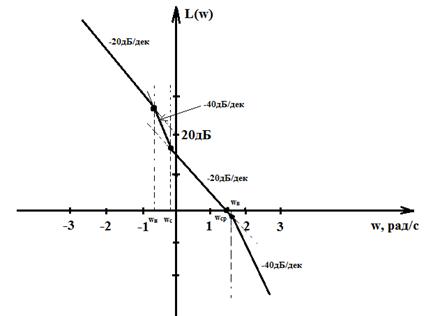
рис. 12.8
· Теперь можно вычислить Wж(s) (рис. 12.9):
![]()

рис. 12.9
Теперь передаточная функция R(s) последовательного регулятора равна (рис. 12.10).
![]()
рис. 12.10
Строим переходную характеристику для замкнутой системы Wz(s) по формуле (рис. 12.11).

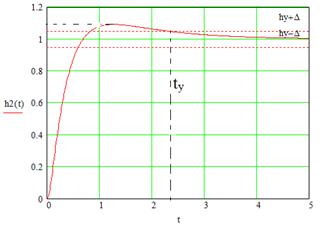
рис. 12.11
Теперь оцениваем желаемые характеристики по графику желаемой переходной характеристики замкнутой системы.
· ty = 2.29с < tуж = 2.5с. Время установления удовлетворило требованию.
· σ = 9.2% < σж = 20%. Наивысшая точка графика hmax = 1.0914. Перерегулирование также удовлетворило желаемому результату
Построим графики ЛАЧХ и ЛФЧХ (рис. 12.12).
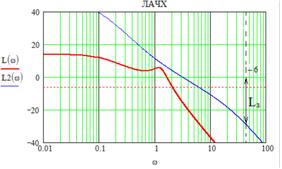
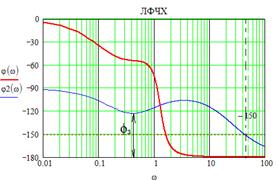
рис. 12.12
На данных графиках построены ЛАЧХ и ЛФЧХ передаточной функции разомкнутой системы и передаточной функции желаемой системы.
· Оценим по ЛАЧХ запас по фазе. На графике ЛАЧХ проведем линию в -6дБ – это базовый запас по фазе, предъявляемый нами вначале. Затем заметим, в какой точке желаемая ЛАЧХ пересекает эту линию – ω = 6 рад/с. На этой частоте на графике ЛФЧХ желаемая функция имеет значение 111˚. Но по графику видно, что есть место при ω=0.4 рад/с, которое ближе расположено к отметке в -150˚. В том месте ϕ(ω) = -123˚. Следовательно, запас по фазе составляет 180˚ - 123˚ = 57˚. Запас по фазе более чем достаточный.
· Оценим по ЛФЧХ запас по амплитуде. Отмечаем линию на ЛФЧХ на -150˚. С ней желаемый график ЛФЧХ пересекается на частоте равной ω = 43 рад/с. Переходим на график ЛАЧХ и смотрим L2(43) = -28.6 дБ. Следовательно, запас по амплитуде будет равен 28.6дБ.
Теперь оценим коэффициент статических ошибок первой степени. Построим для этого линейный график (рис. 12.13) и проследим на какую величину будет отставать график замкнутой системы.
![]()
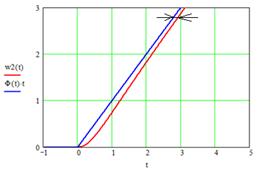
рис. 12.13
Как видно из графика с1 = 0.12 ≈ 0.1. Следовательно, это требование тоже выполняется.
12.3. Построить схему моделирования ЗС с регулятором.
У нас есть схема для разомкнутой системы W(s), которая показана на рисунке (рис. 7.5) для ПФ (рис. 7.2). Нам необходимо построить схему для последовательного регулятора по функции R(s) (рис. 12.10). Затем соединить две схемы и замкнуть их обратной отрицательной связью (рис. 12.14). Затем подать на вход этой замкнутой системы специальный сигнал (рис. 7.11).
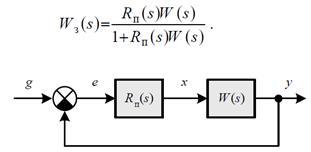
рис. 12.14
Составим схему для R(s). Сначала преобразуем R(s) – перемножим все скобки и приведем подобные. В результате получим отношение полиномов BR(s) / AR(s) (рис. 12.15).
![]()
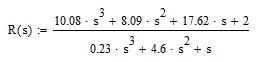
рис. 12.15
Рассчитаем схему для полинома AR(s).





|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
