

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рис. 18. К расчету реализуемой зоны поражения ЗРК
В блоке 15 рассчитывается дальность обнаружения, необходимая для поражения цели на ближней границе зоны поражения по формуле:
L0min = Lбг + Vц (tраб + tрак. б),
где время полета ракеты до ближней границы расчетной зоны поражения (tрак. б) определяют по формуле:
 .
.
В блоке 16 производится сравнивание дальности до конца участка обнаружения и дальности обнаружения, необходимой для поражения цели на ближней границе зоны поражения.
Lkо[![]() , j] < L0min.
, j] < L0min.
Если условие выполняется, осуществляется переход к блоку 14, в противном случае – к блоку 17.![]()
В блоке ![]() 17 дальность обнаружения принимается равной дальности до конца текущего участка обнаружения.
17 дальность обнаружения принимается равной дальности до конца текущего участка обнаружения.
L0 = Lkо[![]() , j].
, j].
В блоке 18 определяется:
дальность пуска, соответствующая полученной дальности обнаружения:
Lп = L0 – (Vц tраб);
дальность пуска, необходимая для поражения цели на ближней границе зоны поражения:
Lп min = L0 min – (Vц tраб).
В блоке 19 производится сравнивание значений, рассчитанных в блоке 18:
Lп < Lп min.
Если условие выполняется, осуществляется переход к блоку 14, в противном случае – к блоку 20.
В блоке 20 производится проверка на равенство 1 отношения скоростей цели и ракеты.
![]() .
.
Если условие выполняется, осуществляется переход к блоку 22, в противном случае – к блоку 21.
В блоках 21, 22 вычисляется реализуемая дальность поражения по формулам:
Примечание: пояснение логики работы алгоритма определения глубины участков, возможных для обстрела цели в пределах зоны поражения ЗРК с учетом зоны обнаружения РЛС (блоки 23-29) на направлении анализа, показано на рис. 19.
В блоке 23 производится сравнивание реализуемой дальности поражения (Lпор ) с дальностью до ближней границы расчетной зоны поражения.
Lпор < Lбг(Н).
Если условие выполняется, осуществляется переход к блоку 14, в противном случае – к блоку 24.
В блоке 24 производится сравнивание реализуемой дальности поражения (Lпор ) с дальностью до дальней границы расчетной зоны поражения.
Lпор > Lдг (Н).
Если условие выполняется, осуществляется переход к блоку 25, в противном случае – к блоку 26.
В блоке 25 производится ограничение дальности поражения значением дальности до дальней границы расчетной зоны поражения.
Lпор = Lдг (Н).

Рис. 19. К пояснению логики работы алгоритма расчета реализуемой зоны огня ЗРК.
В блоке 26 производится сравнивание дальности до начала текущего участка обнаружения (Lno[![]() , j]) и дальности до ближней границы расчетной зоны поражения.
, j]) и дальности до ближней границы расчетной зоны поражения.
Lno[![]() , j] < Lбг (Н).
, j] < Lбг (Н).
Если условие выполняется, осуществляется переход к блоку 28, в противном случае – к блоку 27.
В блоке 27 производится сравнивание дальности до начала текущего участка обнаружения (Lno[![]() , j]) и реализуемой дальности поражения цели (Lпор ).
, j]) и реализуемой дальности поражения цели (Lпор ).
Lпор ![]() Lno[
Lno[![]() , j ]
, j ]
Если условие выполняется, осуществляется переход к блоку 29, в противном случае – к блоку 14.
В блоках 28, 29 определяются значения дальностей до начала и конца текущего участка поражения при этом:
в блоке 28 принимается:
Lkр[![]() , j] = Lпор;
, j] = Lпор;
Lnр[![]() , j] = Lбг(Н);
, j] = Lбг(Н);
в блоке 29 принимается:
Lkр[![]() , j] = Lпор;
, j] = Lпор;
Lnр[![]() , j] = Lno[
, j] = Lno[![]() , j].
, j].
В блоке 30 обнуляется массив максимальной дальности поражения:
Lпор. max[j] = 0.
В блоках с 31 по 34 определяется огибающая реализуемой дальней границы зоны огня.
В блоке 34 проверяется выполнение критерия окончания цикла вычислений по азимуту:![]() .
.
Если условие выполняется, осуществляется переход к блоку 35, в противном случае – к блоку 36.
В блоке 35 осуществляется переход к анализу следующего азимутального направления:
j = j + 1;
β = β + Δβ.
В блоке 36 осуществляется отображение на экране монитора результатов расчетов (реализуемой зоны огня).
В блоке 37 осуществляется запись результатов расчетов в базу данных.

Рис. 20. Алгоритм решения задачи (начало).
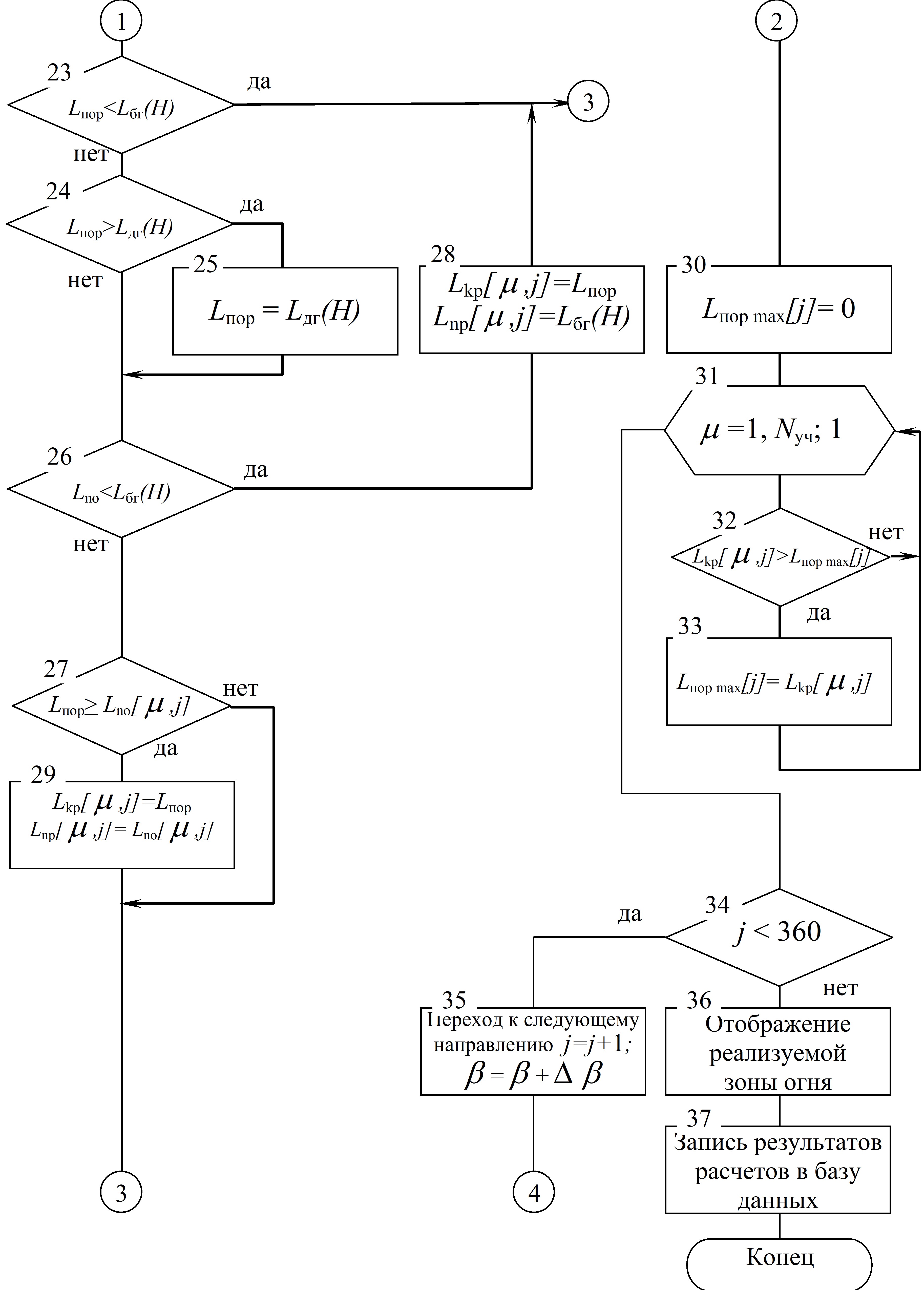
Рис. 20. Алгоритм решения задачи (окончание).
ТРЕБОВАНИЯ К ИНТЕРФЕЙСУ
Построение профиля рельефа
При расчете и построении профилей рельефа для выбранной РЛС направление построения профиля должно задаваться пользователем с помощью манипулятора "мышь" или численным значением азимута относительно РЛС.
Дальность, на которую строится профиль рельефа, должна быть равна приборной дальности РЛС. На профиле рельефа необходимо отображать:
- угол закрытия; дальность до препятствия, определяющего угол закрытия; линию радиотени; траекторию полета цели на заданной высоте; координаты позиции РЛС; азимут направления, для которого построен профиль; высоту фазового центра антенны; высоту и характер полета цели (с огибанием рельефа или на постоянной высоте).
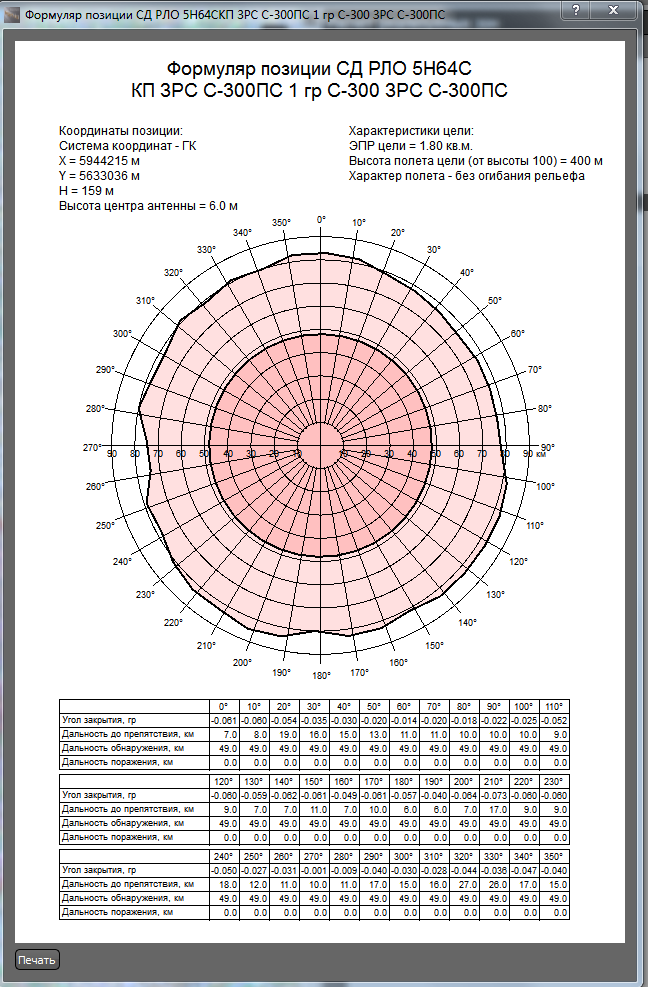
Построение формуляра позиции
При расчете и построении формуляра позиции выбранной РЛС на формуляре позиции необходимо отображать:
- координаты позиции РЛС; высоту фазового центра антенны РЛС; ЭПР цели; высоту и характер полета цели (с огибанием рельефа или на постоянной высоте); изображение в азимутальной развертке зон видимости и обнаружения РЛС;
в табличном виде для азимутальных направлений от 0 до 350 градусов через 10 градусов следующую информацию:
- угол закрытия; дальность до препятствия, определяющего угол закрытия; дальность обнаружения РЛС; дальность поражения (для ЗРК).
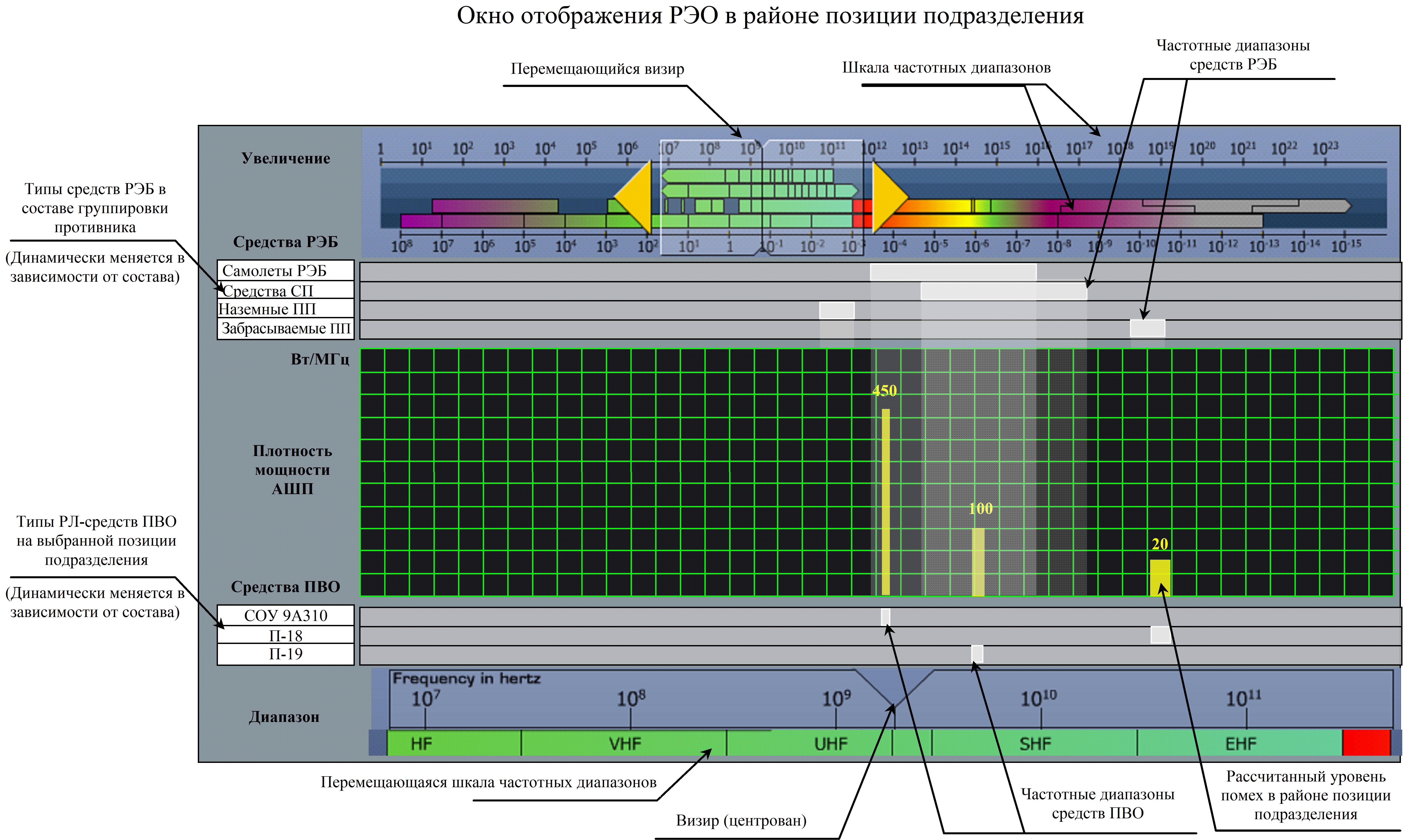
Индикатор РЭО
При расчете и выводе на экран радиоэлектронной обстановки в районе позиции подразделения вид окна выходных данных должен быть следующим Рис.
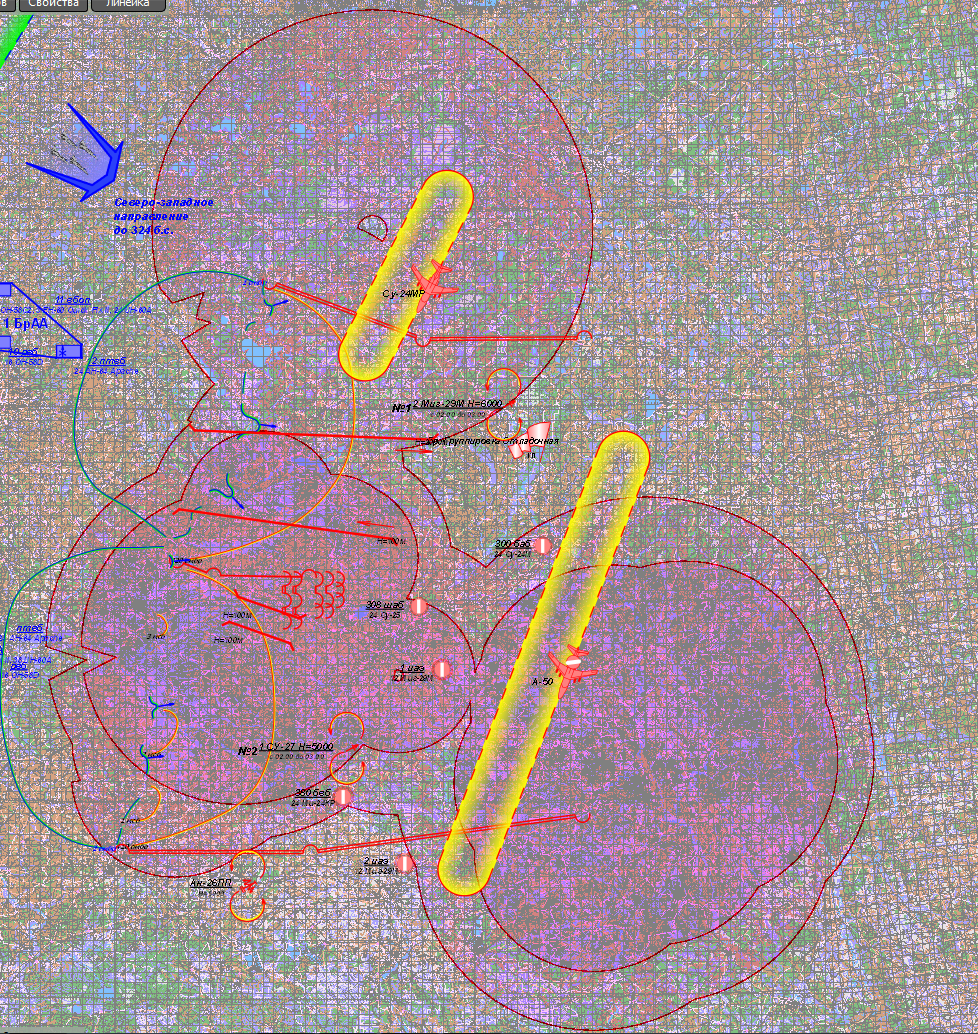
Зона обнаружения и зона огня
1. Результаты расчета зон видимости и обнаружения должны отображаються на фоне ЦКМ в виде контура этих зон с заливкой определенного цвета в двух режимах:
- расчет на одной высоте; расчет на нескольких высотах.
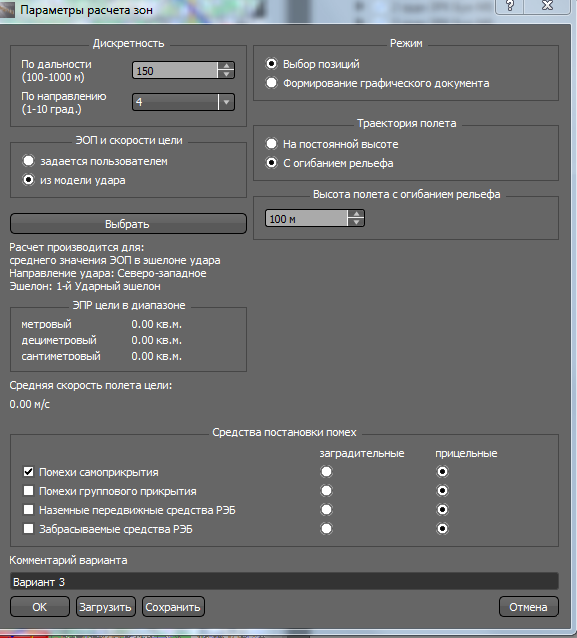
2. Траектория цели должна строиться либо без огибания рельефа местности либо с огибанием рельефа местности, при этом траектория полета цели в вертикальной плоскости должна повторять профиль рельефа местности на заданной высоте от рельефа.
3. При полете цели с огибанием рельефа местности, должна быть установлена высота полета цели относительно рельефа местности. При полете цели на постоянной высоте, должна быть установлена высота полета цели относительно высоты условной точки.
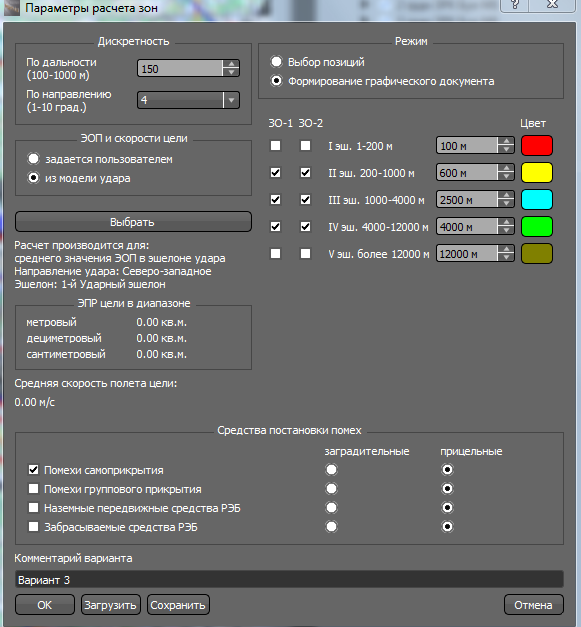
4. В режиме расчет на нескольких высотах должно строиться семейство зон, по одной в каждом из пяти эшелонов высоты, при этом высота полета цели для каждого эшелона должна иметь возможность изменяться в пределах:
- I эшелон – 0…200 м; II эшелон – 200…1000 м; III эшелон – 1000…4000 м; IV эшелон – 4000…12000 м; V эшелон – >12000 м.
6. В режиме расчета на одной высоте должен быть предусмотрен режим пересчета одной зоны в реальном времени при изменении оператором точки стояния РЛС.
7. Расчет зон должен производиться не только для наземных средств ПВО, но и для РЛС, расположенных на надводных кораблях ВМС.
8. По щелчку правой клавишей на знаке РЛС, ЗРК должно выводиться контекстное окно со списком типов соответствующих средств.
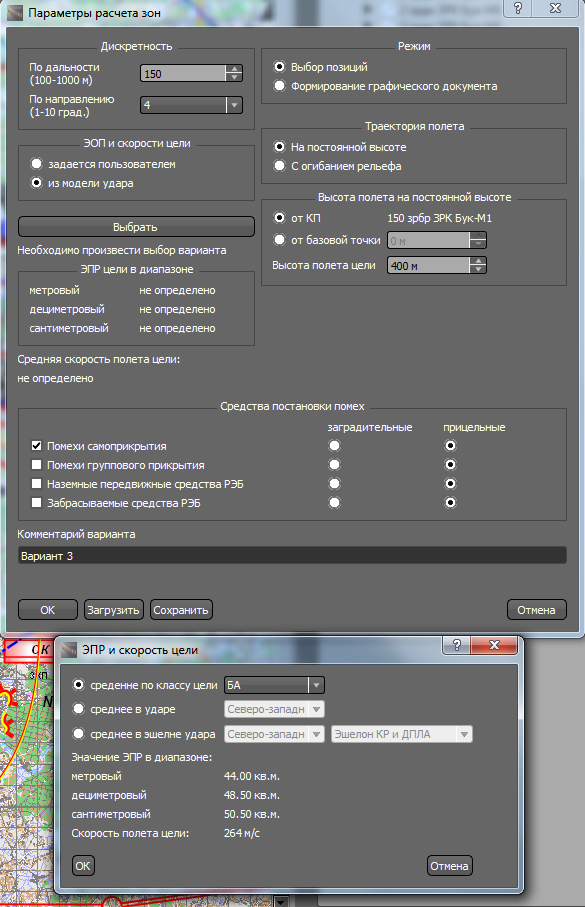
9. Зоны должны рассчитываться при следующих возможных вариантах значений ЭПР и скорости цели:
- заданное значение; среднее по классу СВН в ударе (по всем направлениям удара); среднее в ударе (по всем направлениям удара); среднее в эшелоне удара (по всем направлениям удара).
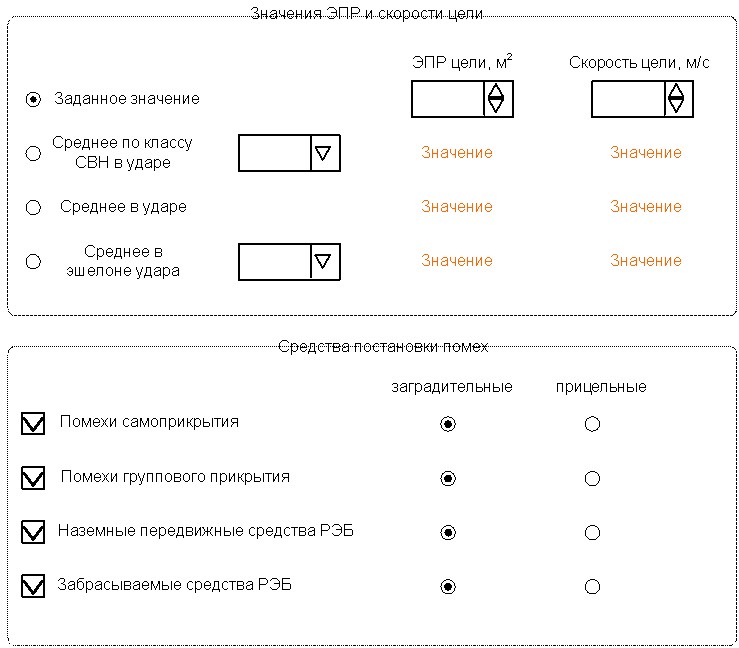
10. Если для построения зон выбран вариант "Заданное значение ЭПР", то в группе "Средства постановки помех" должно появляться окно для ввода данных плотности помех самоприкрытия (Вт/Мгц).
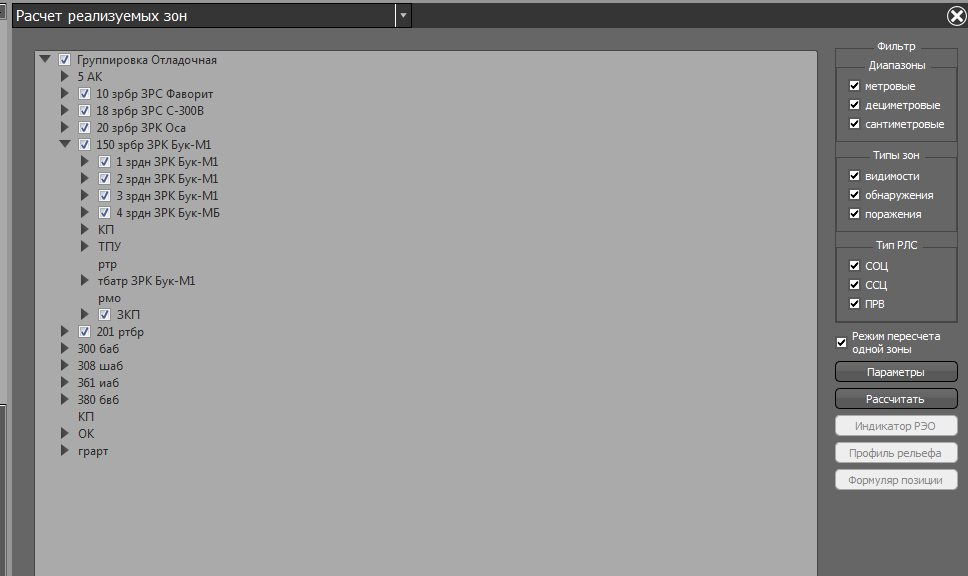
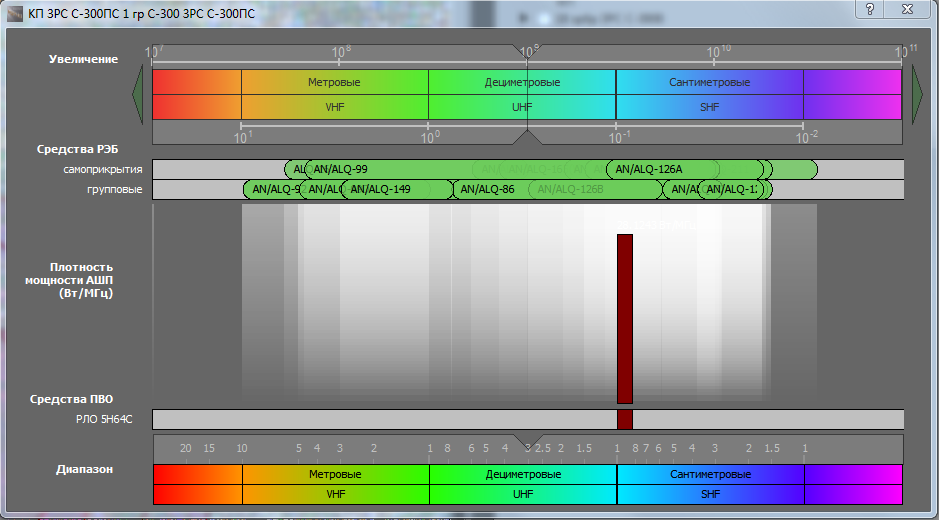
11. При расчете зон, если на вкладке «Настройка» в окне «Диапазоны РЛС» (рис.) выбран режим «Все», то зоны строятся только при условиях ЭПР:
- среднее по классу СВН (выбирается класс из списка), среднее в ударе, среднее в эшелоне удара (выбирается эшелон удара из списка).
12. Если на вкладке «Настройка» в окне «Диапазоны РЛС» выбран режим какого-либо диапазона волн, то расчет может производиться для всех условий по ЭПР.
Выходные данные:
Вывод информации о рассчитанной ЭПР эквивалентного постановщика помех СП (для случая задания ЭПР из модели удара). Отображение дерева группировки с учетом всех ограничений, накладываемых фильтром. Возможность просмотра рельефа местности на заданном азимуте, формуляра позиции, индикатора РЭО.Интерфейс (из старого Редута)


Аббревиатура | Полное название |
СВН | Средство воздушного нападения |
РЛС | Радиолокационная станция |
ПРВ | |
ОТЗ | Оперативно тактическая задача |
ПВО | Противовоздушная оборона |
ЗРК | Зенитный ракетный комплекс |
ВМС | Военно-морские суда |
ЭПР | Эффективная поверхность рассеяния |
РЭБ | Радиоэлектронная борьба |
РТВ | |
СОУ | Самоходная огневая установка |
БМ | Боевая машина |
СП | Помехи самоприкрытия |
КП | Комбинированные помехи |
СОЦ | Станция обнаружения целей |
ССЦ | Станция сопровождения целей |
СРЦ | |
АШП | Активные шумовые помехи |
ЭОП | Эффективная отражающая поверхность |
ДНА | Диаграмма направленности антенны |
КП | Командный пункт |
ТС | Точка стояния |
НПП | Наземные постановщики помех |
ЗПП | Забрасываемые постановщики помех |
ДПЛА | Дистанционно пилотируемый летательный аппарат |
ГЛ ДН | Главный лепесток диаграммы направленности |
БЛ ДН | Боковой лепесток диаграммы направленности |
ГП | Помехи группового прикрытия |
ПП | Помехопостановщик |

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
