

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
№ пп | Наименование данных | Обозна-чения | Размер-ность | Предел изменения | Примечание |
Типы РЛС для отображения зон обнаружения | ССЦ, СОЦ, ПРВ | ||||
Признак механической установки минимального или максимального угла антенны РЛС в угломестной плоскости | Prмех. уст | 0,1 | 0-установка минимального угла, 1-установка максимального угла | ||
Диапазоны волн РЛС, зоны которых будут отображаться | метровый; дециметровый; сантиметровый | ||||
Типы зон для отображения | Видимости; обнаружения; поражения | ? Как согласуется с задачей 3 значения | |||
Признак режима пересчета одной зоны | 0,1 | 0-режим выключен; 1-режим включен. | |||
Дискретность расчета зон по азимуту | Δβ | град. | 0,1...10 | ||
Дискретность расчета зон по дальности | ΔR | м | 1...1000 | ||
Высота полета цели | Hц | м | 0...30000 | Вводится вручную или из модели удара | |
ЭПР цели в зависимости от диапазона волн РЛС | σ( F3,О(F1)) | м2 | 0,01...99,9 | Вводится вручную или из модели удара | |
Признак режима расчета зон | выбор позиций; формирование графического документа | ||||
Значение высот полета целей в каждом эшелоне высоты в режиме формирования графического документа | Hi | м | В соответствии с границами диапазонов высот | ||
Признак расчета зон | по эшедону удара; по удару; по классу СВН в ударе |
3.3.2 Выходные данные
В результате решения задачи модулям системы передается следующая информация
Таблица 3
№ | Наименование данных | Обозна- чение | Размер-ность | Предел изменения | Примечание |
11 | Контуры зон видимости | Координаты полигона | |||
22 | Контуры зон обнаружения | Координаты полигона | |||
33 | Контуры зон огня | Координаты полигона |
3.3.3 Ограничения и допущения
1. За условную точку начала отсчета (постоянной) высоты полета цели принимается барометрическая высота точки стояния командного пункта группировки или базовой точки, для которой решается задача.
2. Диаграммы направленности антенн (ДНА) РЛС аппроксимируются функцией вида, представленного на рис.2.

Рис.2. Вид аппроксимированной ДНА
где
Gглпр - коэффициент усиления диаграммы направленности приемной антенны по главному лепестку;
Gблпр - коэффициент усиления диаграммы направленности приемной антенны по первому боковому лепестку;
Gфпр - коэффициент усиления диаграммы направленности приемной антенны по уровню фона.
3. Для определения возможности влияния средств постановки помех противника на работу РЛС проверка осуществляется по признаку работы РЛС и средства постановки помех в одном диапазоне частот.
4. Расчеты проводятся для условия постановки работе РЛС только активной шумовой помехи, при этом делаются следующие допущения:
а) помехи могут ставиться:
- средствами самоприкрытия из состава ударных групп; постановщиками помех группового прикрытия (самолетами и вертолетами РЭБ); ДПЛА РЭБ; наземными (передвижными и забрасываемыми) постановщиками помех; комбинированным способом (всеми перечисленными средствами в любом сочетании);
б) постановщики помех группового прикрытия (специализированные самолеты или вертолеты РЭБ) ставят помехи работе РЛС из центров зон дежурства с известными координатами;
в) ДПЛА РЭБ ставят помехи из центра зоны барражирования;
г) высота помехопостановщиков из состава удара определяется как среднее значение высоты диапазона высоты, в котором они действуют.
5. Анализ и отображение помеховой обстановки осуществляется по эшелонам удара.
6. При воздействии постановщиков помех самоприкрытия на станцию сопровождения целей предполагается, что один из них действует по главному лепестку ее диаграммы направленности, а остальные распределены в воздушном пространстве равномерно и создают помехи работе РЛС по уровню боковых лепестков и фона ДНА.
При этом предполагается, что постановка помех осуществляется с расстояния, равного приборной дальности обнаружения РЛС. Спектральная плотность мощности помехи, действующей по главному лепестку ДНА равна средней спектральной плотности мощности помех по всем постановщикам помех самоприкрытия в ударе. Если постановщик помех самоприкрытия один, то он действует по главному лепестку ДНА, по боковым лепесткам и фону диаграммы направленности воздействие помех отсутствует.
7. При воздействии постановщиков помех самоприкрытия на станцию обнаружения целей предполагается, что такие помехи действуют по боковым лепесткам и фону ДНА.
8. При расчете дальности обнаружения ССЦ в помехах предполагается, что антенна помехопостановщика направлена на РЛС ССЦ (РЛС находится в направлении максимума ДНА станции помех). И антенна РЛС ССЦ развернута в направлении на постановщик помех.
9. Для станций помех как наземного, так и воздушного базирования проверяется факт наличия прямой видимости между станцией помех и антенной РЛС. В случае отсутствия прямой видимости предполагается, что такая станция помех на РЛС не влияет.
10. При заданном во входных данных виде боевых действий "оборона" (W=1), считается, что все мобильные РЛС (ЗРК) ведут разведку с позиций, оборудованных в инженерном отношении, т. е. из окопа, глубина которого (hо) определена инструкцией по эксплуатации на каждый тип РЛС (ЗРК).
3.3.4 Общий алгоритм расчета зон обнаружения и видимости
I. На первом шаге необходимо рассчитать суммарную плотность мощность помех самоприкрытия СП (при их наличии) по классам СВН в эшелонах удара. Обобщенный алгоритм расчета представлен на Рис. 3

Рис. 3 Расчет суммарной плотности мощности помех СП по классам СВН в эшелонах удара
II. На втором шаге необходим произвести расчет зон обнаружения и видимости для всех РЛС из состава группировки.
1) На первом шаге алгоритма необходимо считать значение высоты рельефа в точке расположения КП:
hкп = fun_hr(Xкп, Yкп).
Также должно быть проанализировано значение признака Prмех. уст механической установки угла антенны РЛС угломестной плоскости на конкретной РЛС. Если механическим способом установлен максимальный угол антенны РЛС, то значение
![]() ,
,
![]() .
.
Если механическим способом установлен минимальный угол антенны РЛС, то значение
![]() ,
,
![]() .
.
2) В цикле по РЛС необходимо произвести расчет максимальной дальности обнаружения цели РЛС в зависимости от ЭОП и высоты цели в частотном диапазоне РЛС по формуле:
![]() ,
,
где ![]() - коэффициент снижения дальности обнаружения за счет поглощения радиоволн в атмосфере, рассчитывается в зависимости от диапазона волн РЛС (метровый, дециметровый, сантиметровый) и метеоусловий (простые, сложные).
- коэффициент снижения дальности обнаружения за счет поглощения радиоволн в атмосфере, рассчитывается в зависимости от диапазона волн РЛС (метровый, дециметровый, сантиметровый) и метеоусловий (простые, сложные).
Примечание:
Для РЛС каждого типа, в базе данных хранится таблица дальностей обнаружения для набора высот для цели с ЭПР 1м2.
Для получения ![]() - дальности обнаружения цели для произвольной высоты
- дальности обнаружения цели для произвольной высоты ![]() , не содержащейся в базе, необходимо произвести линейную интерполяцию между табличными значениями высот нижним -
, не содержащейся в базе, необходимо произвести линейную интерполяцию между табличными значениями высот нижним - ![]() и верхним
и верхним ![]() , между которыми находится текущая высота
, между которыми находится текущая высота ![]() по формуле:
по формуле:
При больших значениях ЭПР ![]() может получиться больше приборной дальности РЛС. В этом случае, необходимо ограничивать данное значение приборной дальностью.
может получиться больше приборной дальности РЛС. В этом случае, необходимо ограничивать данное значение приборной дальностью.
3) Далее производится установка начальных значений:
hтс = fun_hr (Xтс, Yтс) – считывание высоты рельефа в точке стояния РЛС;
Δβ - шаг приращения по углу (угол изменяется от 0 до 360 градусов). Приращению угла соответствует индекс j.
ΔR – шаг приращения по дальности. Приращению дальности соответствует индекс i.
Введенные обозначения i, j поясняются на Рис.4.
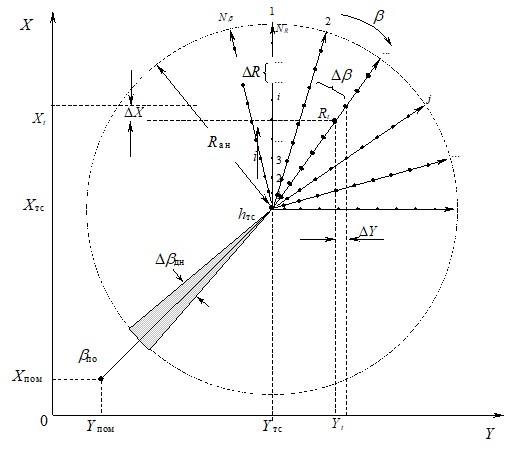
Рис. 4. К расчету зоны обнаружения РЛС
pvc [i, j] = 0 – массив признаков видимости (1 – есть видимость, 0 –нет видимости);

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
