

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
5) Далее должно производиться вычисление дальности обнаружения целей РЛС в помехах по формуле
 (28)
(28)
Результат расчета ![]() должен быть округлен до целого числа.
должен быть округлен до целого числа.
Алгоритм расчета дальности обнаружения целей в помехах представлен на Рис. 14
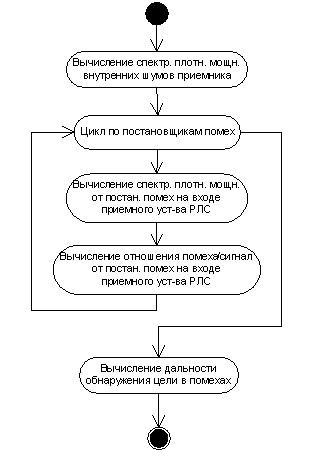
Рис. 14 Алгоритм расчета дальности обнаружения целей в помехах
3.3.6 Алгоритм расчета зоны огня
Входные данные
Таблица 4
№ | Наименование данных | Обозна-чения | Размер-ность | Предел изменения | Примечание |
1 | Тип ЗРК | F2 | - | 1...99 | |
2 | Средняя скорость полета ракеты | Vр | м/с | 0...9999 | |
3 | Работное время ЗРК | tраб | с | 1...99 | |
4 | Количество анализируемых участков невидимости цели (провалов в зоне обнаружения РЛС ЗРК) | Nуч | ед. | 0...99 | принять Nуч = 10 (фиксировано в коде) |
5 | Горизонтальная дальность до ближней границы расчетной зоны поражения ЗРК | Lбг(Н) | км | 0...999 | |
6 | Горизонтальная дальность до дальней границы расчетной зоны поражения ЗРК | Lдг(Н) | км | 0...999 | |
7 | Прямоугольные (Гаусса) координаты позиции огневого средства | Xтс Yтс | км | 0...9999,999 0...999,999 | +№ зоны |
Вводится оператором АРМ Таблица 5
№ | Наименование данных | Обозна-чения | Размер-ность | Предел измене-ния | Примечание |
1 | Дискретность расчета зон огня по азимуту | Δβ | град. | 0,1...99 | Вводится из расчетной задачи Р02-1 для рассчитанных зон обнаружения РЛС |
2 | Дискретность расчета зон огня по дальности | ΔR | м | 1...9999 | Вводится из расчетной задачи Р02-1 для рассчитанных зон обнаружения РЛС |
3 | Высота полета цели | Hц | м | 0...9999 | Вводится из расчетной задачи Р02-1 для рассчитанных зон обнаружения РЛС |
4 | Средняя скорость полета цели | Vц | м/с | 0...999 |
3.3.7 Ограничения и допущения
1. Расчет и построение горизонтального сечения реализуемой зоны огня ЗРК на заданной высоте полета цели производится только для условия обстрела целей на встречном курсе.
2. Расчет и построение горизонтального сечения реализуемой зоны огня ЗРК производится только после расчета и построения зоны обнаружения радиолокационной станции (СНР, МСНР, СУРН, ССЦ и т. д.) этого же ЗРК на заданной высоте полета цели.
3. Максимальное количество участков с признаком невидимости цели на очередном направлении анализа для среднепересеченной местности принимается равным Nуч=10. Для других типов рельефа местности Nуч может уточняться опытным путем и корректироваться в базе данных (для равнинной местности в меньшую сторону, для горной - в большую).
4. Цель в пределах зоны поражения по направлению не маневрирует. Скорость цели – величина постоянная.
5. Обстрел цели возможен только в пределах расчетной зоны поражения.
6. На участках с признаками видимости цели ее сопровождение и обстрел зенитным ракетным комплексом производится устойчиво. На участках невидимости обнаружение, сопровождение и обстрел невозможен.
7. Анализ участков невидимости начинается с максимальной дальности обнаружения.
8. Если на огневом средстве имеется несколько типов средств поражения, то в качестве расчетной зоны поражения принимается зона, соответствующая средству поражения с максимальными параметрами.
3.3.8 Описание алгоритма решения задачи
Сущность решения задачи РЗО заключается в определении возможности обстрела цели в пределах расчетной зоны поражения с учетом возможностей ЗРК по обнаружению цели на заданной высоте, а также в расчете участков возможного обстрела и построения всей реализуемой зоны огня.
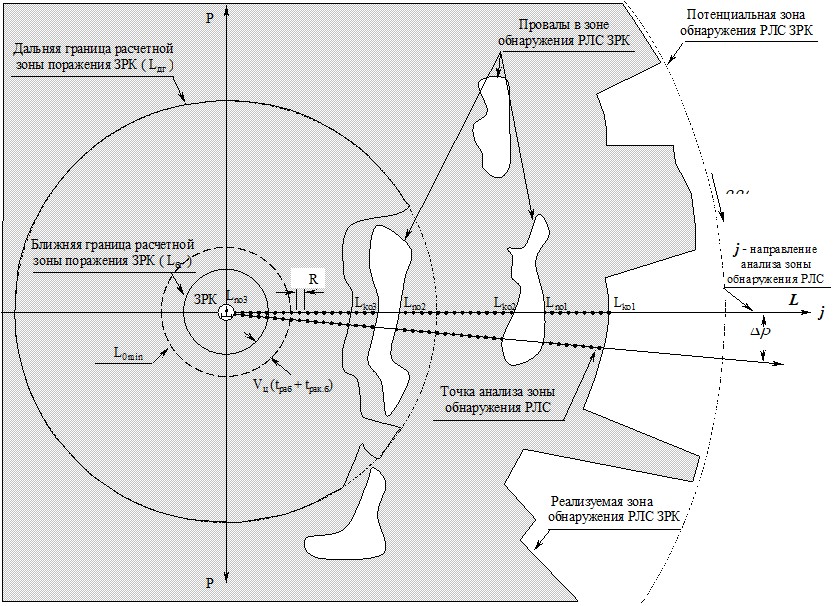
На рис. 20. представлена общая схема решения задачи. Очевидно, что горизонтальное сечение реализуемой зоны обнаружения цели, летящей на малой высоте, радиолокационной станцией ЗРК (СНР, МСНР, СУРН, ССЦ и т. д.) будет лежать внутри потенциальной зоны обнаружения, иметь изрезанный характер и провалы (т. е. участки невидимости цели). На направлении анализа и расчета зоны обнаружения (в зависимости от степени пересеченности рельефа местности) таких провалов может быть несколько. Причем количество провалов в зоне обнаружения РЛС также зависит от способа полета цели. При полете цели с огибанием рельефа местности и на малой высоте количество участков невидимости цели будет больше, с увеличением высоты полета цели количество таких участков будет уменьшаться или их не будет вообще.
Вполне очевидно, что при подходе цели к участку невидимости произойдет срыв сопровождения цели РЛС ЗРК. Это, в свою очередь, приведет к необходимости нового захвата цели после ее повторного обнаружения т. е. повторению выполнения расчетом ЗРК операций подготовки стрельбы. Поэтому, в зависимости от расположения участков невидимости цели (провалов в зоне обнаружения) относительно расчетной зоны огня, они или будут накладывать ограничения на размеры реализуемой зоны огня или нет. Схема алгоритма расчета горизонтального сечения реализуемой зоны огня ЗРК представлена на рис. 18.
В блоке 1 осуществляется ввод исходных данных для решения задачи в соответствии с данными табл. 4 и табл. 5.
В блоке 2 производится обнуление массивов начала и конца обнаружения, начала и конца поражения.
Lnо[![]() ,j]=0;
,j]=0;
Lkо[![]() ,j]=0;
,j]=0;
Lnp[![]() ,j]=0;
,j]=0;
Lkp [![]() ,j]=0;
,j]=0;
j=0; i = ent ![]() .
.
В блоке 3 обнуляется признак наличия зоны обнаружения (pnzo), номер участка видимости (![]() ) принимается равным 1:
) принимается равным 1:
pnzo=0; ![]() =1.
=1.
В блоке 4 производится переход к следующей точке анализа с шагом ΔR.
В блоке 5 анализируется значение признака наличия зоны обнаружения (pnzo). Если pnzo=0, осуществляется переход к блоку 6, в противном случае – к блоку 8.
В блоке 6 анализируется значение признака обнаружения цели (рос[i, j]) в точке с координатами (i, j). Если рос[i, j] = 1, осуществляется переход к блоку 7, в противном случае – к блоку 8.
В блоке 7 признаку наличия зоны обнаружения присваивается значение 1 (pnzo =1) и осуществляется заполнение массива конца участков обнаружения.
Lkо[![]() , j] = i ΔR.
, j] = i ΔR.
В блоке 8 анализируется значение признака наличия зоны обнаружения (pnzo). Если pnzo=1, осуществляется переход к блоку 9, в противном случае – к блоку 11.
В блоке 9 анализируется значение признака обнаружения цели (рос) в точке с координатами (i, j). Если рос[i, j] = 0, осуществляется переход к блоку 10, в противном случае – к блоку 11.
В блоке 10 признаку наличия зоны обнаружения (pnzo) присваивается значение 0 (pnzo=0), заполняется массив начала участков обнаружения:
Lnо[![]() , j]=(i+1) ΔR;
, j]=(i+1) ΔR;
и осуществляется переход к следующему участку обнаружения:
![]() =
= ![]() +1.
+1.
В блоке 11 осуществляется проверка, не превышает ли количество просмотренных участков (![]() ) заданного максимального значения (Nуч).
) заданного максимального значения (Nуч).
![]() < Nуч .
< Nуч .
Если условие выполняется, осуществляется переход к блоку 12, в противном случае – к блоку 13.
Примечание: Если участков больше, чем задано, то все что осталось, включать в последний участок.
В блоке 12 определяется конец цикла по дальности.
i ![]() 2.
2.
Если условие выполняется, осуществляется переход к блоку 4, в противном случае – к блоку 13.
В блоке 13 определяется максимальная дальность обнаружения.
L0max[j] = Lkо[1, j].
В блоке 14 начинается цикл по количеству участков обнаружения и заполняется массив максимальных дальностей обнаружения по азимуту:
![]() =1, Nуч, 1.
=1, Nуч, 1.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
