

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
poc [i, j] = 0 – массив признаков обнаружения (1 – цель обнаруживается в точке, 0 – цель не обнаруживается в точке);
HRtб [i, j] = 0 – массив высот радиотени;
Rпр [j] = 0 – расстояние до мах угла закрытия на выбранном направлении;
e [j] = 0 – мах угол закрытия на выбранном направлении;
β = 0 – текущий угол анализа;
3) Далее производиться расчет фактической барометрической (относительно уровня моря) высоты фазового центра антенны с учетом расположения РЛС (окоп, горка и т. д.) на позиции по формуле (в каждом конкретном случае либо Δh либо ho равно 0):
haб = ha+ hтс + Δh - ho
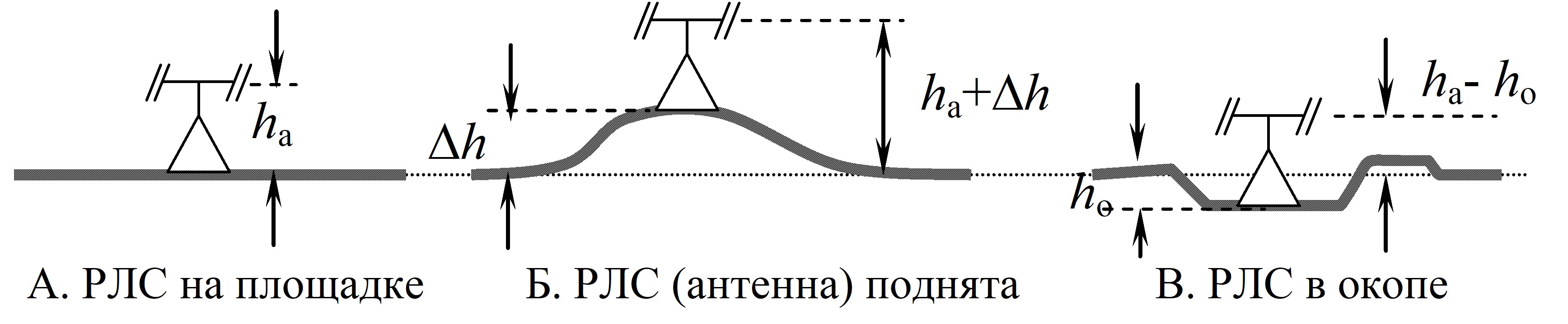
Рис.5. К определению высоты фазового центра антенны
4) Расчет приращения координат текущей точки анализа должен производиться по формуле:
Δx = ΔR ⋅ cosβ;
Δy = ΔR ⋅ sinβ.
При этом значения координат начальной точки анализа устанавливаются следующим образом:
xt = Xтс;
yt = Yтс;
Rt = 0;
i = 0 (индекс по дальности);
e = -1000 (начальное значение угла закрытия).
Переход к анализу очередной точки должен осуществляться по правилу:
xt = xt + Δx;
yt = yt + Δy;
Rt = Rt + ΔR;
i = i + 1.
5) После завершения расчетов по алгоритмам расчета угла закрытия и расчета высоты радиотени и угла места в текущей точке анализа производится присваивание значений выходным данным:
- углу закрытия е[j]=e; дальности до препятствия, определяющего угол закрытия Rпр[j]=Rp..
6) Далее должен производиться анализ наличия классов помех.
7) В случае наличия помех СП или КП, должен производиться анализ класса текущей рассматриваемой РЛС. В зависимости от класса РЛС (СОЦ, ССЦ) должен осуществляться расчет эквивалентной плотности мощности помех СП.
8) При наличии помех (ГП, НП, ЗП) необходимо произвести подготовку данных для расчета дальности обнаружения в помехах.
9) Далее производится расчет дальности обнаружения цели в помехах.
10) Для точек с текущим азимутом и дальностью, находящейся в границах от
![]() до Rан необходимо установить poc [i, j] = 0.
до Rан необходимо установить poc [i, j] = 0.
Этапы расчетов 1) - 5) представлены в алгоритме на рис. 6.
Этапы расчетов 6) – 10) представлены на рис. 7.
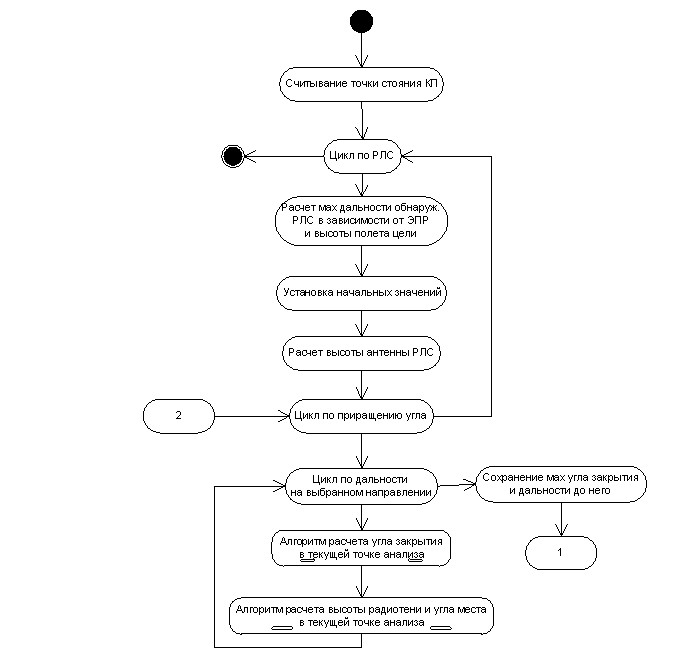
Рис. 6
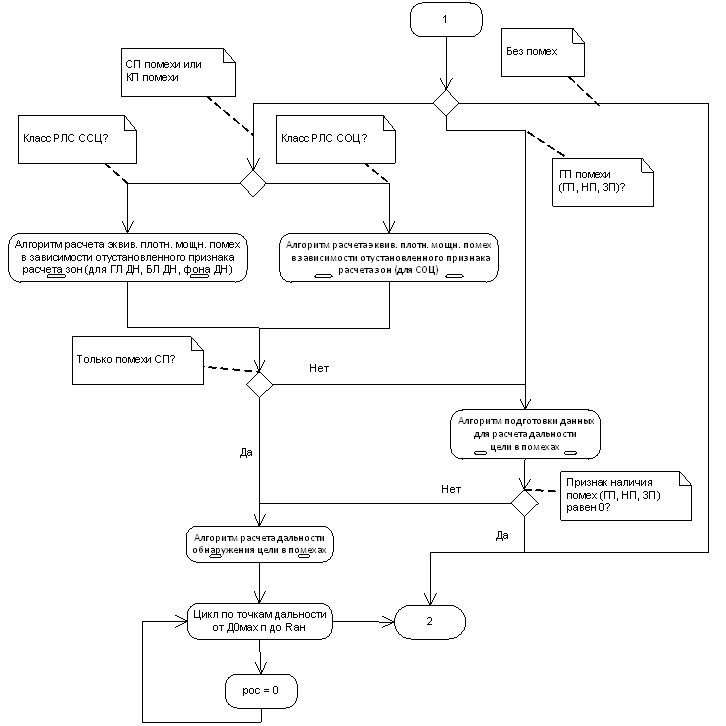
Рис. 7
3.3.5 Описание частных алгоритмов
3.3.5.1 Алгоритм расчета угла закрытия в текущей точке анализа
Входные данные:
№№ | Наименование данных | Обозна-чения | Размер-ность | Предел изменения | Примечание |
1. | Текущая точка анализа |
| Рассчитано | ||
2. | Матрица высот в точках рельефа |
| ЦКМ | ||
3. | Дальность до текущей точки анализа (проекция) | Rt | Рассчитано | ||
4. | Фактическая барометрическая (относительно уровня моря) высота фазового центра антенны |
| Рассчитано | ||
5. | Значение угла закрытия рассчитанное на предыдущем шаге | e | Изменяется рекурсивно. На первом шаге e = 0 | ||
6. | Диапазон волн работы РЛС | O(F1) | - | 1, 2, 3 | 1 - см; 2 - дм; ИД 3 - м |
7. | Максимальный угол места обнаружения цели РЛС | εмакс(F1) | град. | 0...90 | по типу РЛС ИД |
8. | Минимальный угол места обнаружения цели РЛС | εмин(F1) | град. | -20...+90 | по типу РЛС ИД |
9. | Тип РЛС | F1 | - | 1...99 | ИД (исходные данные) |
Выходные данные:
№ № | Наименование данных | Обозна-чения | Размер-ность | Предел изменения | Примечание |
1. | Признак отрицательности угла закрытия | Pr | 0, 1 | 1 - угол отрицательный | |
2. | Угол закрытия в текущей точке анализа | e | Изменяется рекурсивно. На первом шаге e = 0 | ||
3. | Дальность до угла закрытия | Rp |
1) После считывания значения высоты рельефа в текущей точке анализа из матрицы высот ![]() должен производиться расчет значения угла закрытия по формуле:
должен производиться расчет значения угла закрытия по формуле:
 (1)
(1)
2) Далее должна производиться проверка (сравнивание) значения угла закрытия, рассчитанного для текущей точки et с заданным значением e.
Если рассчитанное значение превышает заданное значение e, т. е. et > e, то осуществляется присваивание:
e = et ; Rp = Rt. (2)
3) Далее проводится анализ признака РЛС метрового диапазона. Если РЛС метрового диапазона, то производится проверка отрицательности текущего угла закрытия. В противном случае переходим на конец алгоритма.
Если текущий угол закрытия отрицательный, производится присваивание признаку Pr значения 1, в противном случае переходим на конец алгоритма.
4) После установки признака производится проверка условия, что текущий угол закрытия меньше значения
![]() (3)
(3)
Если условие выполняется, то переменной e присваивается значение
e = ɛmin-0.5•ɛmax, (4)
в противном случае переменной e присваивается значение e = et.
Алгоритм расчета угла закрытия представлен на Рис.8
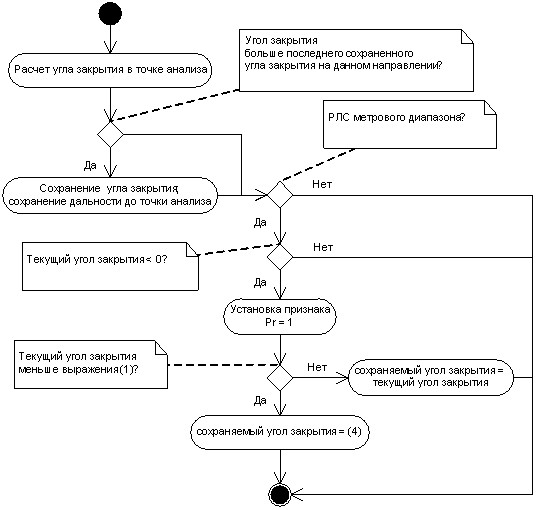
Рис. 8 Алгоритм расчета угла закрытия
3.3.5.2 Алгоритм расчета высоты радио тени и угла места в текущей точке анализа
Входные данные:
№№ | Наименование данных | Обозна-чения | Размер-ность | Предел изменения | Примечание |
1. | Текущая точка анализа |
| Рассчитано | ||
2. | Дальность до текущей точки анализа (проекция) | Rt | Рассчитано | ||
3. | Угол закрытия в текущей точке анализа | e | Результат алгоритма расчета угла закрытия | ||
4. | Фактическая барометрическая (относительно уровня моря) высота фазового центра антенны |
| Рассчитано | ||
5. | Высота полета цели на постоянной относительно точки стояния РЛС высоте |
| ИД | ||
6. | Высота полета цели с огибанием рельефа местности |
| ИД | ||
7. | Признак полета цели с огибанием рельефа местности | og | 0, 1 | 1- с огибанием рельефа местности | |
8. | Высота рельефа в точке расположения КП |
| ЦКМ | ||
9. | Высота рельефа в текущей точке анализа |
| ЦКМ | ||
10. | Признак отображения зоны видимости РЛС | pzv | 0, 1 | Отображать ИД | |
11. | Признак отрицательности угла закрытия | Pr | 0, 1 | 1 - угол отрицательный Рассчитано | |
12. | Признак механической установки минимального или максимального угла антенны РЛС в угломестной плоскости | Prмех. уст | 0,1 | 0-установка минимального угла, 1-установка максимального угла ИД | |
13. | Максимальный угол антенны РЛС в угломестной плоскости, устанавливаемый механическим способом | емех. макс(F1) | град | 0…15 | ИД |
14. | Минимальный угол антенны РЛС в угломестной плоскости, устанавливаемый механическим способом | емех. мин(F1) | град | 0…-10 | ИД |
15. | Максимальный угол места обнаружения цели РЛС | εмакс(F1) | град. | 0...90 | по типу РЛС ИД |
16. | Минимальный угол места обнаружения цели РЛС | εмин(F1) | град. | -20...+90 | по типу РЛС ИД |
17. | Тип РЛС | F1 | - | 1...99 | ИД |
18. | ЭПР цели в зависимости от диапазона волн РЛС | σ( F3,О(F1)) | м2 | 0,01...99,9 | Вводится вручную или из модели удара ИД |
19. | Коэффициент, соответствующий дальности обнаружения цели РЛС с ЭОП = 1 м2 на высоте Нц | A(F1, Нц) |
| 1...999 | по типу РЛС ИД |
20. | Общее поглощение радиоволн | dE(O) | дБ/км | 0 (пму) 0.015(сму) 0 (пму) 0,003(сму) 0 (пму) 0,001(сму) | для 1-го (см) диапазона (О=1) для 2-го (дм) диапазона (О=2) для 3-го (м) диапазона (О=3) ИД |
21. | Тип метеоусловий (из раздела "общие условия обстановки") | Tму | 0,1 | 0- простые МУ (ПМУ) 1- сложные МУ (СМУ) ИД | |
22. | Максимальная дальность обнаружения цели РЛС в зависимости от ее ЭОП |
|
Выходные данные:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
