


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Тогда за один и тот же промежуток времени по отношению к подвижной системе координат тело совершает перемещение Soтн, а подвижная система перемещается по отношению к неподвижной на Sпер. Тогда перемещение тела по отношению к неподвижной равно Sабс. Учитывая, что перемещение - вектор, получаем (рис 17):
Saбс = Soтн + Sпер (1.22)
Поделив обе части на малый промежуток времени получим формулу закона сложения скоростей:
Vaбс = Voтн + Vпер (1.23)
Анологично получается формула сложения ускорений
аабс = аотн + апер (1.24)
задание: Данный рисунок иллюстрирует случай движения вдоль одной оси Оx, а формулы сложения даны в векторном виде. Выведите их.
Полученная формула сложения скоростей, позволяет перейти от одной системы координат к другой при описании механического движения тела.
Перемещение плоской фигуры, происходящее в плоскости расположения этой фигуры (плоскоп-параллельное движение), можно рассматривать как результат наложения поступательного движения тела вместе с некоторой произвольной точкой О тела (полюс) и вращательного движения тела относительно этой точки. Выбирая полюс в различных точках тела, можно по разному осуществить разложение плоского движения на поступательное и вращательное.
Если за полюс принять точку, скорость которой равна нулю в данный момент времени (мгновенный центр скоростей) то плоское движение можно представить как ряд вращений вокруг этой точки.
Проиллюстрируем сказанное на примере: Обод катится по горизонтальной поверхности (рис 18).
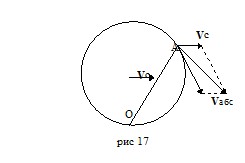
Рассмотрим движение точки А обода. Он движется, как одно целое со скоростью Vc, и любая его точка вместе с тем вращается вокруг оси - С. Поэтому А имеет одновременно и скорость Vc и скорость Vк. Складывая эти скорости, найдем скорость абсолютную Vабс. С другой стороны точка О обода в данный момент покоится, значит ее можно считать мгновенным центром скоростей и рассматривать движение А, как вращение вокруг О. Тогда ее скорость будет направлена по касательной к окружности с центром в точке О, что совпадает с ранее полученным результатом.
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
динамика - раздел механики, изучающий законы движения тел с учётом причин, обуславливающих характер данного движения.
Механическое движение тел изменяется только в процессе их взаимодействия друг с другом. При этом тела могут деформироваться и приобретать ускорения.
Меру взаимодействия тел, в результате которого тела деформируются или приобретают ускорение, называют силой.
Сила - величина векторная; она характеризуется числовым значением, направлением действия и точкой приложения к телу. Вектор силы всегда имеет начало в точке, принадлежащей телу на которое эта сила действует.
Обозначение: F
Единицы измерения: [ Н ] - ньютон
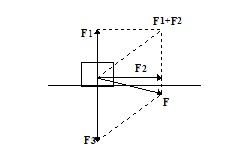
Так как сила - векторная величина, то в случае если к телу, размерами и формой которого можно пренебречь в условиях данной задачи, приложены несколько сил F1, F2, F3 и т. д. то их действие можно заменить действием лишь одной силы - равнодействующей.
Закон векторного сложения сил называется принципом суперпозиций. Он выражается следующей общей формулой:
F = F1 + F2 + F3 + ....= ∑Fi (2.1)
Если реально действующие силы заменены равнодействующей, то в дальнейшем нужно считать, что к частице приложено не несколько сил, а только одна - их равнодействующая.
При отсутствии внешних воздействий или их компенсации тела сохраняют состояние покоя или равномерного прямолинейного движения. Это явление называют инерцией.
Опыт показывает, что если к разным телам прикладывать равные по величине силы, то результат этого будет вообще говоря, различным. С кинематической точки зрения они приобретают различные ускорения, т. е. каждое сопротивляется изменению скорости по разному.
Свойство тел препятствовать изменению скорости называют инертностью.
Так как разные тела обладают этим свойством в разной степени, то естественно ввести величину, характеризующее это свойство.
Меру инертности тел при поступательном движении называют массой тела.
Явление инертности позволяет, имея тело выбранное в качестве эталона (масса такого тела принимается за единицу), определить массу любого другого тела.
задание: Опишите каким образом это делается. Какое тело принимают за эталон массы в физике?
Основой динамики служат три закона Ньютона.
ПЕРВЫЙ ЗАКОН НЬЮТОНА: Существуют такие системы отсчёта в которых тела находятся в покое или движутся равномерно и прямолинейно если на них не действуют силы или действие этих сил компенсируется.
Такие системы называются инерциальными.
Из этого закона следует, что свободное движение тел - движение по инерции есть такое же естественное их состояние, как и покой.
Любая система отсчета, движущаяся с постоянной скоростью по отношению к известной инерциальной системе, будет также инерциальной, причем все явления будут протекать в них одинаково. Таким образом все инерциальные системы отсчета являются равноправными по отношению друг к другу.
ВТОРОЙ ЗАКОН НЬЮТОНА: ускорение тела прямо пропорционально равнодействующей сил, действующей на тело и обратно пропорционально массе этого тела.
а = F / m (2.2)
Уравнение выражает причинно - следственную связь между кинематической и динамической величинами, т. е. для любого вида движения тела существуют конкретные причины его существования. Меняются причины меняется и движение тела.
Направление ускорения совпадает с направлением равнодействующей сил, действующих на тело. В выбранной системе координат уравнение (2.2) эквивалентно системе уравнений в проекции на оси координат.
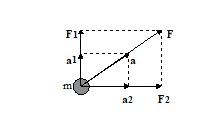
Действие сил на тело не зависит друг от друга. Каждая из сил F1, F2..., приложенных к телу сообщает ему такое ускорение, как если бы других сил не было. В этом состоит принцип независимости действия сил.
Подставляя (2.1) в (2.2) получаем:
а = F / m = F1+F2+F3+... / m = а1+а2+а3+... (2.3)
Результирующее ускорение а равно геометрической сумме ускорений сообщаемой каждой силой в отдельности.
Если равнодействующая сил равна нулю (силы компенсируют действие друг друга) то и ускорение равно нулю, а значит тело или покоится или движется прямолинейно и равномерно в зависимости от выбора системы отсчёта.
Если равнодействующая сила и скорость тела направлены по одной прямой (в этом случае под действием сил изменяется только модуль скорости), то движение тела будет прямолинейным равноускоренным.
Если же равнодействующая направлена под углом к вектору скорости, то движение тела будет криволинейным. В случае, когда равнодействующая в любой момент времени перпендикулярна вектору скорости, тело будет двигаться по окружности с постоянной по модулю скоростью.
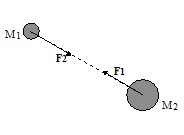
ТРЕТИЙ ЗАКОН НЬЮТОНА: Тела действуют друг на друга с силами одной природы, равными по величине и противоположными по направлению.
F1 = - F2 (2.4)
Основное содержание этого закона состоит в том, что действие одного тела на другое носит взаимный характер. При взаимодействии тел силы рождаются только парами, при этом одна сила действует на одно тело, другая на другое (т. е. эти, равные по модулю силы приложены к различным телам).
СИЛЫ В ПРИРОДЕ
Механическое взаимодействие тел обусловлено их упругостью и свойством притягиваться друг к другу. Причина упругости кроется в электрическом взаимодействии (притяжении и отталкивании ) атомов и молекул, составляющих тела. Свойство притягиваться друг к другу проявляют все тела, имеющие массу.
1.СИЛА ВСЕМИРНОГО ТЯГОТЕНИЯ: - это сила, возникающая между двумя телами, обладающими гравитационной массой. (инертная масса отвечает за свойство тела сопротивляться изменению скорости, а гравитационная - за величину силы притяжения между телами).
Сила всемирного тяготения является силой притяжения. Это центральная сила так, как она направлена вдоль прямой, соединяющей оба тела. Опытным путём Ньютон пришел к формуле, позволяющей определять численное значение этой силы:
F = G (2.5)
сила взаимодействия между двумя телами прямо пропорциональна произведению масс этих тел и обратно пропорциональна квадрату расстояния между ними.
Коэффициент пропорциональности ( G ) носит название гравитационной постоянной. Из (2.6) следует, что гравитационная постоянная численно равна силе взаимодействия между двумя телами массой 1кг каждое, находящимися на расстоянии 1м.
Эта сила равна G = 6,67⋅ 10 [ ] (2.6)
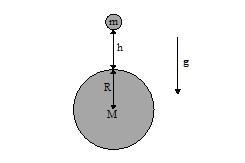
Существуют ограничения на применение формулы (2.5). Она применима лишь для материальных точек (расстояние между телами много больше их размеров) и тел сферической формы (в этом случае R - расстояние между их центрами.(см рис.).
2. СИЛА ТЯЖЕСТИ
Запишем формулу закона всемирного тяготения для какого - либо тела, которое находится на высоте h от поверхности Земли. С другой стороны по второму закону эта сила равна

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
