


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Тогда по второму закону Ньютона для каждого тела
F1 = m1 a1
F2 = m2 a2
учитывая формулу для ускорения
F1 = m1 ( V1 - V01 ) / t ; F2 = m2 ( V2 - V02 ) / t
после группировки получаем
F1 t = m 1 ( V1 - V01 ) ; F2 t = m 2 ( V2 - V02 )
величины, стоящие в левой части называются импульсом силы - произведение силы, действующей на тело на время в течении которого оно происходило. Для двух взаимодействующих тел время взаимодействия одинаково.
складываем левые и правые части уравнений
F1 t + F2 t = m1 V1 - m1 V01 + m2 V2 - m 2V02
Учитывая третий закон Ньютона, векторная сумма слагаемых в левой части равна нулю. тогда, группируя слагаемые получаем
m1 V01 + m2 V02 = m1V1 + m2V2 (4.1)
в левой и правой части стоят одинаковые величины - произведение массы тела на его скорость.
Это произведение называют импульсом тела.
Обозначение: P
Единицы измерения: [ кг м / с ]
Формула: P = mV
Импульс тела - величина векторная.
Анализируя полученное выражение, приходим к выводу, что геометрическая сумма импульсов двух тел остается величиной неизменной и не зависит от времени, если эти два тела образуют замкнутую систему. Подобное равенство можно записать и для более двух тел. Слева - импульс системы тел до взаимодействия равен справа - импульсу системы после взаимодействия.
Тогда закон сохранения импульса запишется в простой форме
Р = const (4.2)
ЗАКОН СОХРАНЕНИЯ МОМЕНТА ИМПУЛЬСА
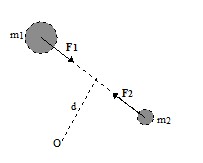
Пусть два, взаимодействующих друг с другом тела вращаются вокруг точки О под действием сил взаимного притяжения.
По основному закону динамики вращательного движения
М1 = I1 ε
М2 = I2 ε
Учитывая определение углового ускорения и определение момента силы, получим
F1 d = I1 ( w1 - w01 ) / t
F2 d = I2 ( w2 - w02 ) / t
складываем правые и левые части, учитывая, что моменты равны по модулю и имеют разные знаки, получаем
I1 w1 - I1 w01 = I2 w2 - I2 w02
группируем слагаемые (4.3)
I1 w01 + I2 w02 = I1 w1 + I2 w2
слева и справа стоит сумма по сути одинаковых величин, которые называют моментом импульса.
Обозначение:L
единицы измерения: [ кг/с ]
Формула: L = I w
применяя новые обозначение, приходим к закону сохранения момента импульса:
L = const (4.4)
И так закон сохранения момента импульса: момент импульса замкнутой системы остается величиной постоянной.
ЗАКОН СОХРАНЕНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ.
Пусть тело массы m переместилось на S, двигаясь с ускорением а. Применяем следующую формулу кинематики
2 S a = V - V0
заменяем ускорение a = F / m через равнодействующую сил под действием которых совершается перемещение тела
получим
2 S F / m = V - V0
F S = m V / 2 - m Vo / 2
выражение в левой части - это работа всех сил, действующих на тело.
A = F S (4.6)
Обозначение: А
единицы измерения: [ Дж ]
исходя из математического определения скалярного умножения векторов формула работы приобретает вид:
A = F S Cos(F S) (4.7)
задание: найдите условия, при которых работа положительна, отрицательна, равна нулю.
А = 0 -
А > 0 -
A < 0 -
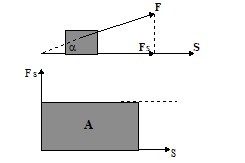
Данную формулу можно применять в случае, если сила остается неизменной. проецируя (4.7) на направление перемещения получаем
A = Fs S (4.8)
Формула имеет простую геометрическую интерпретацию. Площадь под кривой Fs(S) численно равна работе.
Выражение в правой части (4.6) имеет единицы измерения [Дж], и каждое из слагаемых представляет собой кинетическую энергию тела или системы тел конечную и начальную.
Кинетическая энергия - это энергия движущегося тела. В данном случае это энергия поступательного движения материальной точки или центра масс тела, имеющего размеры.
Обозначение: Ек
единицы измерения: [ Дж ]
Формула: Ек =
задание: найдите формулу для кинетической энергии вращающегося тела, учтя, что i-я частица этого тела имеет i-ю скорость.
Формула (4.6) принимает вид
A = Eк - Екo (4.9)
и носит название теоремы об изменении кинетической энергии: механическая работа всех сил, действующих на систему идет на изменение ее кинетической энергии. Формула применима только в случае, если внутренняя энергия системы не меняется.
Найдем выражение для работы силы тяжести.
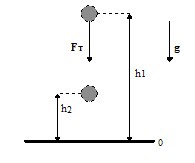
Пусть тело массы М в начальный момент находится в гравитационном поле Земли на малой высоте h1 от поверхности в точке 1. Затем перемещается в точку 2, находящейся на высоте h2 от поверхности т. е. свободно падает. По определению работы, учитывая, что угол между векторами силы тяжести и перемещением равен нулю, получаем
A = Fт S (4.10)
или, учитывая, что
S = h1 - h2
получаем формулу работы силы тяжести
A = Fт (h1 - h2) (4.11)
Анализируя эту формулу можно сделать важный вывод. Работа силы тяжести не зависит от формы траектории, по которой тело переместилось из одной точки в другую, а зависит лишь от начального и конечного положения тела. Следовательно не важно от какой горизонтальной линии отсчитывать высоту ( в формуле 4.11 h1 и h2 прямо не присутствуют). Естественно, чтобы написать выражение для работы силы тяжести необходимо эту линию (нулевой уровень) выбрать произвольным образом. Таким образом работа силы тяжести на замкнутой траектории равна нулю, так как h1 - h2 = 0
задание: Докажите, что работа силы тяжести не зависит от формы траектории, а определяется лишь начальным и конечным положением тела.
В формуле (4.11) стоит разность одной и той же величины.
A = m g h1 - m g h2
Эту величину назвали потенциальной энергией тела в силу того, что тело обладающее этой энергией может показать ее наличие лишь при определенных условиях.
пример: Шарик лежит на столе высотой h. Говорить о том обладает он потенциальной энергией или нет можно лишь после того, как стол из - под него убрать, т. е. убрать препятствие. Шарик начинает двигаться, а это означает, что он обладал потенциальной (возможной) энергией.
Обозначение: Еп
единицы измерения: [ Дж ] - Джоуль
формула: Еп = m g h
Говорить о потенциальной энергии тела возможно лишь в случае выбора нулевого уровня, а так как этот уровень выбирается произвольным образом то получается, что тело может иметь любую потенциальную энергию. Но потенциальная энергия - физическая величина, а значит она должна иметь конкретное значение. Получился парадокс, который решается следующим образом. Очевидно, что на бесконечном расстоянии от земли потенциальная энергия стремится к нулю (ускорение свободного падения стремится к нулю). Выбрав нулевой уровень в бесконечности получаем, что Еп = 0 и выражение для работы силы тяжести запишется следующим образом
A = - m g h (4.12)
Отсюда следует физический смысл потенциальной энергии.
Потенциальная энергия численно равна работе сил гравитации по перемещению тела из бесконечности в данную точку. Знак минус появляется из - за того, что гравитационные силы являются силами притяжения.
РАБОТА СИЛЫ УПРУГОСТИ.
Найдем выражение для работы силы упругости.
К пружине жесткости k прикреплено некоторое тело. Пружину сжимают. Координата тела при этом равна X1, а затем отпускают так, что в некоторый момент координата тела становится равной X2. Формулой работы (4.7) пользоваться нельзя так как сила упругости с изменением координаты тела линейно меняет свое значение.
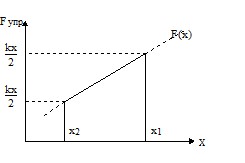
Для нахождения формулы работы воспользуемся геометрической интерпретацией работы. Построим график зависимости силы упругости от координаты тела (рис 6). Площадь под построенной кривой численно равна работе силы упругости.
Таким образом получаем:
A = k X 1/ 2 - k X2 / 2 (4.13)
Таким образом потенциальная энергия упруго деформированного тела равна
Еп = (4.14)
Если система состоит из тела подвешенного к пружине, то оно при сообщении начальной скорости начнет движение под действием сил тяжести и упругости. В этом случае для описания движения тела подставим выражения для работ силы упругости и силы тяжести в формулу (4.9) получим

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
