
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]()
![]() =
= ![]()
![]() +
+ ![]()
![]() . (27)
. (27)
С другой стороны, из (10) следует, что конечным состоянием (n - 1) - ro шага является состояние ![]()
![]() Тогда (27) можно переписать в следующем виде:
Тогда (27) можно переписать в следующем виде:
![]()
![]()
![]()
![]() +
+ ![]()
![]() (28)
(28)
Но
![]()
![]() +
+ ![]()
![]() =
= ![]()
![]() , (29)
, (29)
есть промежуточное состояние ( n - 1)-ro шага и из (27) о учетом (28) следует
![]()
При заданном расходе ![]()
![]() максимальное и минимальное
максимальное и минимальное
значения ![]()
![]() будут определяться соответственно максимальным
будут определяться соответственно максимальным
и минимальным значениями ![]()
![]() . Так как
. Так как ![]()
![]() , то
, то
![]()
![]() =
= ![]()
![]() (30)
(30)
![]()
![]() =
= ![]()
![]() (31)
(31)
Принимая во внимание (30) и (31), окончательно получим
![]()
![]()
![]()
![]() ≤
≤![]()
![]() +
+ ![]()
![]() (32)
(32)
или с учетом (14)
pn-1 ≤ (k+j)n-1 ≤ ![]()
![]() + pn-1. (33)
+ pn-1. (33)
Для произвольного l - го шага неравенство примет вид
pl ≤ (k+j)l ≤ ![]()
![]() + pl. (34)
+ pl. (34)
На рис. 1 представлен в общем вице граф состояний системы управления запасами. Отметим некоторые особенности графа. Во-первых, граф имеет одну начальную и одну конечную вершины. Это следует из того, что начальное и конечное состояния системы заданы. Во-вторых, число промежуточных состояний на каждом шаге равно числу конечных состояний этого шага. И, наконец, переход системы
из любого промежуточного состояния возможен только в одно конечное состояние на каждом шаге. Два последних обстоятельства объясняются тем, что в рассматриваемой задаче расход на каждом шаге задан и, следовательно, какие-либо другие варианты управлений при переходе из промежуточного в конечное состояние отсутствуют.
Рассмотренный вариант построения графа состояний системы управления запасами не является единственным. Можно построить граф, который содержит вершины, соответствующие только начальным и конечным состояниям каждого шага. Такой граф получается более компактным. Но для того, чтобы учесть промежуточные состояния, каждому ребру такого графа необходимо поставить в соответствие два управления, одно из которых переводит систему на каждом шаге из начального в промежуточное, а второе управление - из промежуточного в конечное состояние. Кроме того, определенные трудности представляет расчет числа управлений, которые переводят систему из начального в конечное состояние на каждом шаге.
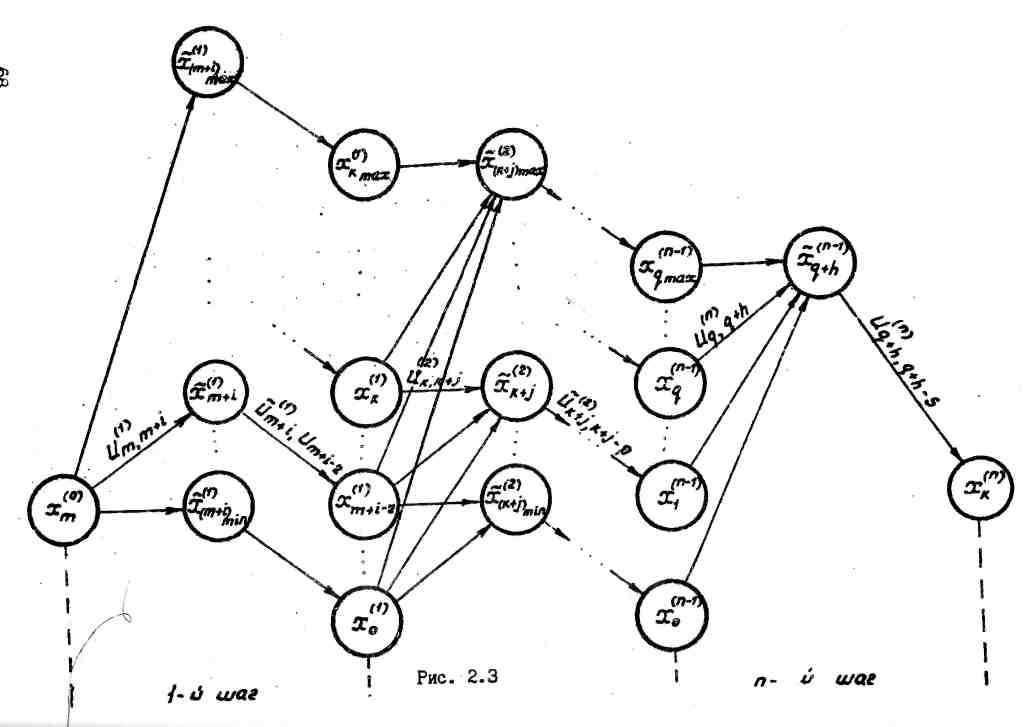
Все это вместе взятое затрудняет построение вычислительной процедуры решения задачи управления запасами. Наконец, следует учесть, что первый вариант построения графа является более, предпочтительным в том случае, когда расход на каждом шаге неизвестен и возможны. различные его варианты. В связи с приведенными соображениями в дальнейшем мы будем пользоваться графом, приведенным на рис. 1.
Так как рассматриваемая задача управления запасами относится к задачам динамического программирования, для ее решения следует воспользоваться методом направленного перебора.
Как известно, вычислительная процедура метода направленного перебора определяется основным функциональным уравнением, которое для рассматриваемой задачи записывается следующим образом:
![]()
![]() (
(![]()
![]() ) =
) = ![]()
![]() . (35)
. (35)
Но, как отмечалось выше, переход системы из состояния ![]()
![]() в состояние
в состояние ![]()
![]() осуществляется через промежуточное состояние
осуществляется через промежуточное состояние ![]()
![]() т. е. управление
т. е. управление ![]()
![]() является составным:
является составным:
![]()
![]() =
= ![]()
![]() -
- ![]()
![]() . (36)
. (36)
Это позволяет (35) представить в виде двух уравнений, учитывающих и промежуточное состояние:
![]()
![]() (
(![]()
![]() ) =
) = ![]()
![]() . (37)
. (37)
![]()
![]() (
(![]()
![]() ) =
) = ![]()
![]() , (38)
, (38)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
