
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
т. е. отличается от вероятности ошибок при оптимальном когерентном приеме тем, что мощность сигнала как бы уменьшилась вдвое. Таким образом, интегрирование после квадратичного детектора при больших значениях ![]() эквивалентно энергетическому проигрышу в 2 дБ по сравнению с когерентным приемом или примерно в 2 дБ с оптимальным некогерентным приемом (кривая б рис. 4.19). Впрочем, при
эквивалентно энергетическому проигрышу в 2 дБ по сравнению с когерентным приемом или примерно в 2 дБ с оптимальным некогерентным приемом (кривая б рис. 4.19). Впрочем, при ![]() квадратичное детектирование плохо аппроксимирует зависимость (4.82) и должно быть заменено линейным.
квадратичное детектирование плохо аппроксимирует зависимость (4.82) и должно быть заменено линейным.
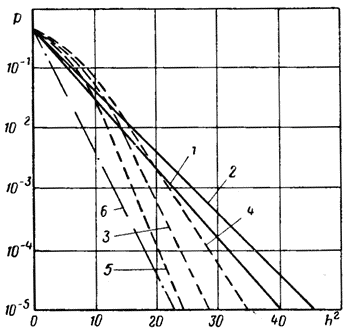
Рис. 2.17. Вероятность ошибки при широкополосном приеме с интегрированием после детектора:
Для линейного детектирования :
 (2.50)
(2.50)
где
Коэффициент корреляции шума на выходе линейного детектора в первом приближении имеет такое же значение, как и на выходе квадратичного. Величина ![]() при
при ![]() и
и ![]() при
при ![]() . Это позволяет воспользоваться полученными выше значениями интервалов корреляции
. Это позволяет воспользоваться полученными выше значениями интервалов корреляции ![]() и
и ![]() Подставив величины (2.50) в (2.47), найдем
Подставив величины (2.50) в (2.47), найдем
![]() (2.51)
(2.51)
где
Здесь для одиночного контура
![]()
а для П-образного фильтра
![]()
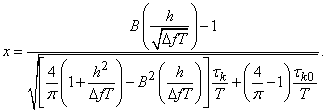
Полученная зависимость показана на рис. 2.17 (кривые ![]() ). При
). При ![]() кривые мало отличаются от соответствующих кривых для квадратичного детектора, а при
кривые мало отличаются от соответствующих кривых для квадратичного детектора, а при ![]() помехоустойчивость схемы с линейным детектором существенно выше, чем с квадратичным, и приближается к помехоустойчивости оптимальной схемы некогерентного приема. При
помехоустойчивость схемы с линейным детектором существенно выше, чем с квадратичным, и приближается к помехоустойчивости оптимальной схемы некогерентного приема. При ![]() можно приближенно считать
можно приближенно считать ![]() и выражение (2.51) упростится:
и выражение (2.51) упростится:
для одиночного контура
![]() (2.51а)
(2.51а)
для фильтра с П-образной характеристикой
![]() (2.51б)
(2.51б)
На практике часто вместо интегратора на выходе детектора используется фильтр нижних частот, не согласованный с прямоугольным импульсом. При этом напряжение на выходе фильтра будет пропорционально не интегралу (2.44), а интегралу Дюамеля
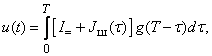 (2.52)
(2.52)
где ![]() — импульсная реакция фильтра нижних частот.
— импульсная реакция фильтра нижних частот.
Этот интеграл представляет случайную величину, числовые характеристики которой можно вычислить, зная ![]() .Если
.Если ![]() мало отличается от (2.49), то и помехоустойчивость такого метода приема будет приближаться к помехоустойчивости приема с интегрированием после детектора. Но обычно применяемые сравнительно простые фильтры нижних частот имеют импульсную реакцию, отличную от нуля при любом значении
мало отличается от (2.49), то и помехоустойчивость такого метода приема будет приближаться к помехоустойчивости приема с интегрированием после детектора. Но обычно применяемые сравнительно простые фильтры нижних частот имеют импульсную реакцию, отличную от нуля при любом значении ![]() . Это приводит к тому, что выходное напряжение фильтра в момент отсчета зависит не только от принимаемого элемента сигнала, но и от предыдущих элементов аналогично тому, как это имеет место на выходе высокочастотного фильтра в схеме узкополосного приема по огибающей.
. Это приводит к тому, что выходное напряжение фильтра в момент отсчета зависит не только от принимаемого элемента сигнала, но и от предыдущих элементов аналогично тому, как это имеет место на выходе высокочастотного фильтра в схеме узкополосного приема по огибающей.
Указанное явление существенно повышает вероятность ошибок, и для борьбы с ним приходится применять фильтры с относительно широкой полосой пропускания, при которой реакция ![]() к моменту
к моменту ![]() в достаточной степени затухает. В результате величина
в достаточной степени затухает. В результате величина ![]() в интеграле (2.52) в значительной части области интегрирования оказывается существенно меньше единицы; это приводит к «неполному интегрированию» помехи, т. е. к уменьшению отношения постоянной составляющей к флюктуирующей составляющей напряжений на выходе фильтра, фигурирующего под знаком функции
в интеграле (2.52) в значительной части области интегрирования оказывается существенно меньше единицы; это приводит к «неполному интегрированию» помехи, т. е. к уменьшению отношения постоянной составляющей к флюктуирующей составляющей напряжений на выходе фильтра, фигурирующего под знаком функции ![]() в (4.91).
в (4.91).
Многочисленные расчеты различных авторов показывают, что для различных характеристик фильтров нижних частот наилучшее компромиссное решение между условиями получения достаточно малых остаточных напряжений от предшествовавших элементов сигнала и наилучшего усреднения шума получается, когда эффективная полоса пропускания фильтра нижних частот приблизительно равна![]() . При этом энергетический проигрыш (относительно приема с интегрированием после детектора) составляет 2-4 дБ.
. При этом энергетический проигрыш (относительно приема с интегрированием после детектора) составляет 2-4 дБ.
Интегрирование или фильтрацию можно применить также после частотного детектора в схеме приема по мгновенной частоте. Для приближенного вычисления вероятности ошибки при ![]() можно также принять распределение усредненной мгновенной частоты нормальным. В случае П-образного фильтра с полосой пропускания
можно также принять распределение усредненной мгновенной частоты нормальным. В случае П-образного фильтра с полосой пропускания ![]() , полагая интервал корреляции равным
, полагая интервал корреляции равным ![]() , повторяя те же рассуждения, что и при выводе (2.47), приходим к следующему результату:
, повторяя те же рассуждения, что и при выводе (2.47), приходим к следующему результату:
 (2.53)
(2.53)
Поскольку частоты сигнала должны попадать в полосу пропускания фильтра, то даже не предусматривая запаса полосы пропускания на нестабильность, следует считать ![]() . Поэтому наименьшая вероятность ошибок при таком приближении равна
. Поэтому наименьшая вероятность ошибок при таком приближении равна
 (2.53а)
(2.53а)
т. е. энергетический проигрыш по сравнению с когерентным приемом равен примерно 2 дБ, а по сравнению с оптимальным некогерентным приемом — около 1 дБ. Этот небольшой проигрыш вызван в основном частичной потерей информации в ограничителе.
Подводя итог, можно отметить, что неоптимальные широкополосные методы приема частотно-манипулированного сигнала, основанные на интегрировании (или даже на обычной фильтрации) после амплитудного детектора или дискриминатора, не сильно отличаются по помехоустойчивости от оптимального некогерентного приема. Впрочем, следует помнить, что эти выводы справедливы лишь при условии ![]() или
или ![]() В противном случае энергетический проигрыш резко возрастает. К тому же, при неоптимальных методах приема по огибающей полоса частот, занимаемая сигналом,
В противном случае энергетический проигрыш резко возрастает. К тому же, при неоптимальных методах приема по огибающей полоса частот, занимаемая сигналом, ![]() значительно превышает величину
значительно превышает величину ![]() так как при малых значениях разности
так как при малых значениях разности ![]() нельзя достаточно хорошо разделить сигналы фильтрами перед детекторами.
нельзя достаточно хорошо разделить сигналы фильтрами перед детекторами.
Принципы функционирования инвариантных систем связи.
3.1. Инвариантная система связи для канала с постоянными параметрами
К настоящему времени известно, что изменения сигналов в каналах связи можно описать соответствующими группами преобразований. В частность, линейные каналы связи(каналы, в которых выполняется принцип суперпозиции) описываются аффинной группой преобразований. Эта группа преобразований обладает инвариантом в форме сохраняющхся отношений длин векторов сигналов, лежащих на одной прямой. Этот инвариант применительно к задачам связи можно трактовать следующим образом: инвариантом линейного канала является отношение длин векторов сигналов, имеющих подобные формы, которое одинаково как для входных, так и для выходных сигналов.
 (3.1)
(3.1)
где![]() - длины векторов входных сигналов,
- длины векторов входных сигналов,
а ![]() - длины векторов выходных сигналов,
- длины векторов выходных сигналов,

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 |
