
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Управляющие входные сигналы, которые влияют на переменные состояния и которые может менять оператор процесса. Это переменные управления U.
![]() . Обычно число управляющих величин R меньше, чем переменных состояния N
. Обычно число управляющих величин R меньше, чем переменных состояния N
.
Отдельно рассмотрим объект управления:
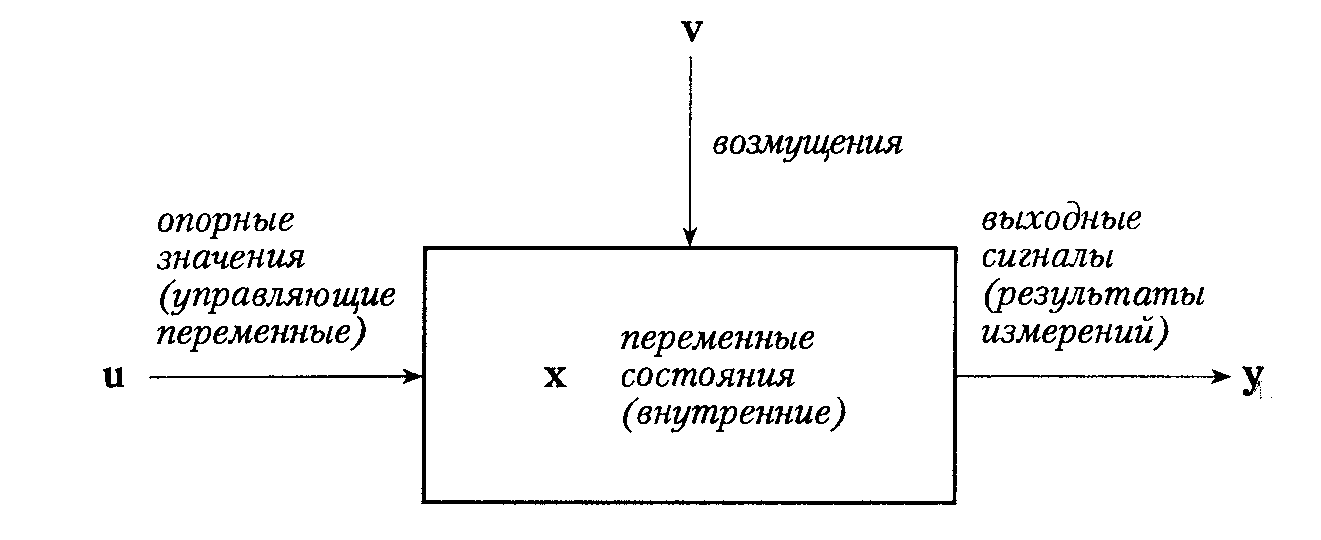
Непосредственно измерить все переменные состояния обычно не удается. Существуют переменные, которые не измеряются.
Возмущения (изменения нагрузки, внутренние шумы) которые влияют на переменные состояния, обозначаются V:
![]()
6.2 Взаимосвязь видов математических моделей многомерных систем
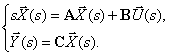
Выше были рассмотрены два вида моделей многомерной системы. Установим связь между этими двумя видами. Так как исходной базой для математических моделей являются дифференциальные уравнения, то логичным будет определить связь уравнений состояния с передаточными матрицами САУ. Для этого применим преобразование Лапласа к уравнениям состояния и выхода
| (1) |
| (2) |
при нулевых начальных условиях, заменим оригиналы переменных изображениями по Лапласу и получим систему векторно-матричных операторных уравнений
| (3) |
Определим связь между вектором входа и векторами состояния и выхода. Из первого уравнения системы (3) имеем –
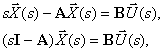
и если матрица ![]() не вырожденная, то есть
не вырожденная, то есть ![]() , получим –
, получим –
| (4) |
Откуда следует, что
| (5) |
Подставив (4) в (3), получаем –
![]() ,
,
В результате получаем –
| (6) |
Вспомним, что компонентами эквивалентных матриц являются передаточные функции системы. Следовательно, выражения (5) и (6) представляют собой универсальные формулы для вычисления всех необходимых для анализа передаточных функций многомерной системы, по которым могут быть получены структурные схемы и частотные характеристики.
Полином ![]() является общим знаменателем для всех передаточных функций, а уравнение –
является общим знаменателем для всех передаточных функций, а уравнение –
| (7) |
является характеристическим уравнением системы.
В общем случае решение для состояний Х(t) системы с постоянными параметрами записывается
![]()
Где ?i собственные значения (полюса) характеристического уравнения матрицы А, еi - - соответствующие им собственные вектора, ?i – значения из строк матрицы участвующей в преобразовании матрицы А в диагональный вид (с учётом начальных значений Х0). Это выражение вытекает из свойств записи матрицы А в диагональном виде, удобном для понимания свойств объекта управления. Видно, что реакция системы является комбинацией движений по собственным векторам матрицы А. Размах движений определяется собственными значениями этой матрицы.
7. Свойства систем описываемых параметрами состояния
Основными аспектами современной линейной теории управления являются: описание систем посредством пространства состояний, оптимизация в терминах квадратичного критерия качества и оптимальное восстановления состояний, например, с применением фильтра Калмана — Бьюси.
7. 1 Управляемость объекта
Понятие управляемости введено известным специалистом Кальманом. Оно основывается на возможности перевода всех параметров состояния объекта из любого заданного значения в любое другое заданное значение за конечное время. Имеется в виду, что есть такая входная вектор - переменная, которая, изменяясь, переводит систему из одного состояния в другое. Пример частично управляемой системы: Смесительный бак в случае подачи обеих расходов с одинаковыми концентрациями С1 =С2. (U) = (F1, F2).
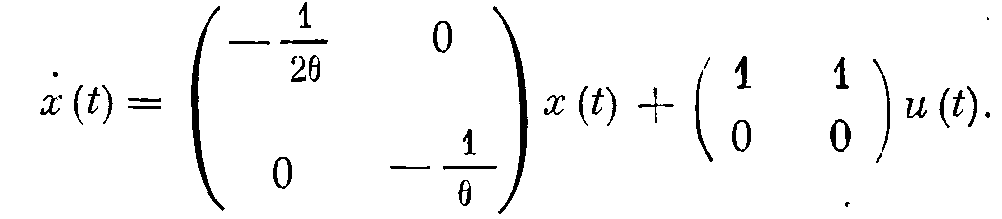 Как бы мы не изменяли параметры F1, F2, вывести концентрацию в баке С на любое значение кроме С1 нам не удастся. Это пример частично управляемой системы.
Как бы мы не изменяли параметры F1, F2, вывести концентрацию в баке С на любое значение кроме С1 нам не удастся. Это пример частично управляемой системы.
Для линейных систем с постоянными параметрами справедлив следующий результат:
N-мерная линейная система с постоянными параметрами х (t) = Ах (t) + Bu (t) является полностью управляемой тогда и только, тогда, когда вектор-столбец матрицы управляемости
Р = (В, АВ, А2В, …., Аn-1 В)
порождает n мерное пространство ( имеет ранг n) .
Матрица Р должна иметь размерность N. Это значит, что входные переменные должно влиять на все n параметров состояния. Если условие не соблюдается, то мы имеем подпространство управляемых состояний, а также подпространство неуправляемых состояний. При учете наличия управляемых и неуправляемых величин, дифференциальное уравнение состояния преобразуется в каноническую форму управляемости:
 Здесь подматрица A11, связанная с управляемой частью параметров состояния, имеет размерность m соответствующую размерности управляющей подматрицы В1 , а пара A11, В1 является полностью управляемой.
Здесь подматрица A11, связанная с управляемой частью параметров состояния, имеет размерность m соответствующую размерности управляющей подматрицы В1 , а пара A11, В1 является полностью управляемой.
Ранг матрицы равен числу строк (столбцов) наибольшей ее подматрицы, у которой определитель не будет равен 0.
7.2 Восстанавливаемость (наблюдаемость) системы
Естественно рассматривать задачу восстанавливаемости, которая ставит проблему определения настоящего состояния по прошлым наблюдениям. Определение восстанавливаемости введено Калманом. Восстанавливаемость дополняет понятие наблюдаемости. Наблюдаемость означает, что имеется возможность определить состояние в момент t0 по значения выходной переменной.
N-мерная линейная система с постоянными параметрами
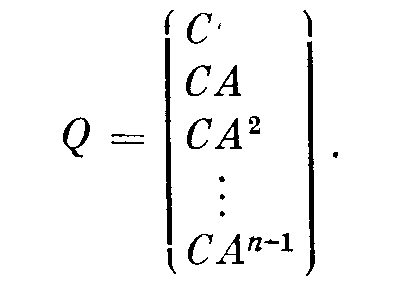
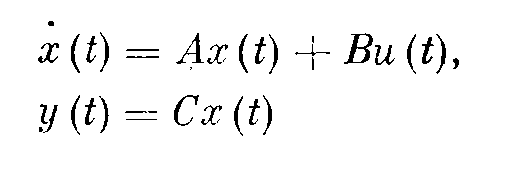 является полностью восстанавливаемой в том и только том случае, если вектор-строки матрицы восстанавливаемости порождают п-мерное пространство
является полностью восстанавливаемой в том и только том случае, если вектор-строки матрицы восстанавливаемости порождают п-мерное пространство
 .
.
Восстанавливаемость зависит только от матриц матрицы измерений С и матрицы А. Она должна иметь размерность N. Это означает, что измеряемых параметров должно быть достаточно чтобы вычислить все n параметров состояния. Если система не является полностью восстанавливаемой, то по выходным измеряемым переменным невозможно однозначно установить, в каком состоянии система находится. Ненаблюдаемые параметры состояния располагаются в нуль-пространстве матрицы Q.
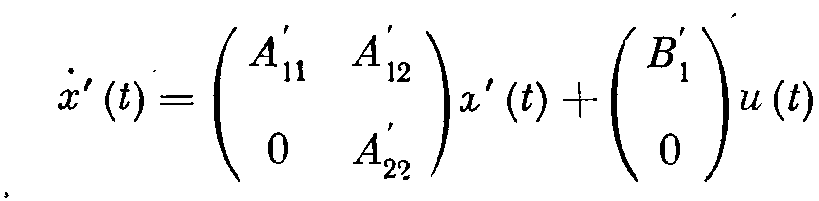
Система параметров состояния представляется в канонической форме восстанавливаемости:
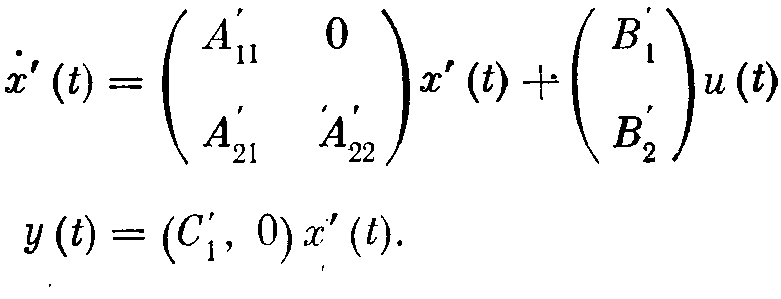
Здесь А'11 — матрица размерами m X m, а пара А'11, С'1 , является полностью восстанавливаемой.
7.3 Наблюдатели состояния
Теория управления дает возможность восстановить не наблюдаемые состояния технологического объекта. Необходима динамическая модель процесса. Кроме того. Необходима модель связывающая измеряемые величины с параметрами состояния. Учитывается, что на систему действует шум состояний, а наблюдения искажаются ошибками измерений (шум измерений).
Известный математик Кальман разработал теорию восстановления состояний, для чего ввел понятие наблюдателя, восстанавливающего состояния.
Для динамической системы x°(t) = A (t) x(t) + B (t) u (t)
y(t)=C(t)• X(t)
Матричное выражение
x?° (t)=A (t)x? (t) + B(t) u(t) + K(t) [y (t) - C(t)x ? (t) ]
является наблюдателем (восстановителем состояния). Здесь x ? - оценка состояния параметра Х. Начальное значение оценки x ?(0) = х(0). K(t) называется матрицей коэффициентов усиления наблюдателя.
Наблюдатель использует принцип обратной связи и сравнивает оценку измерений, полученную с использованием оценки состояния, со значением полученным непосредственным измерением. Полученное отклонение используется для корректировки динамической модели и величины оценок, рассчитываемых по этой модели.
Выражения такого типа применяются и считаются на вычислительных устройствах – компьютерах и контроллерах. Значения параметров используются в числовом (двоичном) виде. Измеряемые значения поступают на входные модули вычислителей, которые преобразует аналоговый входной сигнал в числовой вид.
7.4 Регулирование по восстановленным состояниям
Логично использовать полученные оценки неизменяемых переменных в системах регулирования и управления, используя типовые законы управления. Теория линейного оптимального управления для дифференциальных систем с постоянными коэффициентами показывает, что можно отдельно рассматривать задачу построения устойчивого восстановителя состояния и задачу разработки устойчивого закона управления с обратной связью по состоянию. Их взаимосвязь приводит к устойчивой системы управления по наблюдаемым переменным.
Для решения задачи построения линейного дискретного регулятора с обратной связью по выходной переменной нужно найти управляющее воздействие в виде матрицы U(i):
U(i) = - F(i) • X?(i)
где F(i) матрица коэффициентов для регулятора, X?(i) - линейная оценка состояний полученных восстановителя состояний.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
