
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1.3 Обратная связь
Обязательным взаимодействием в системах автоматического управления является обратная связь параметра характеризующего состояние элемента ( выходной параметр элемента) и исполнительным механизмом действующим на данный объект. Такая идея была сознательно сформулирована в 19 веке на основании обобщения ряда технических решений реализованных в процессе промышленной революции. Новизна заключалась в идее рассматривать объект управления и обратную связь как единую систему. Такая система имеет другие свойства, чем сам объект регулирования. Возникают возможности добиваться желаемого поведения объекта в составе системы. Это то самовозникающая свойство, о котором мы говорили в разделе о системах из множества элементов.
Примером может служить регулятор Уатта. При использовании потока пара для вращения колес, валов и подобных механических конструкций важно держать постоянной скорость вращения этих конструкций. Английский конструктор изобрел устройство, позволяющее успешно решать эту задачу. Массивный шарик связывается пружиной с вращающимся валом. В тоже время он связан рычажной передачей с клапаном на трубопроводе подачи вращающего пара. Шарик вращается вместе с валом и под действием центробежной силы растягивает пружину на определенную величину. При этом он обеспечивает соответствующее открытие клапана (за счет смещения рычажной системы). Первоначальная настройка натяжение пружины и рычажной системы обеспечивают требуемое положение клапана и нужный объем подачи пара для желаемой скорости вращения.
Когда в процессе движения скорость вращения становится выше заданной, увеличивается центробежная сила и шар сильнее растягивает пружину, удаляясь от вала. При этом рычажная передача прикрывает клапан на линии подачи пара. Вращающая сила уменьшается, и скорость вращения падает. При понижении скорости вращения вала, центробежная сила уменьшается. Пружина притягивает шар ближе к валу, а рычажная система соответственно отрывает регулирующий клапан. Пара идет больше, скорость вращения восстанавливается. Этот процесс регулирования является классическим, многократно исследовался, имеет точное математическое описание.
Специального отдельного регулятора в системе Уатта нет. Роль регулятора выполняет пружина с шаром, которая является одновременно и датчиком скорости вращения. Сам регулятор Уатта самостоятельную законченную конструкцию, устанавливается непосредственно на технологическом объекте и работает без участия человека. Энергию для работы он черпает непосредственно из технологического процесса. Человек требуется для предпусковой настройки. Устройства такого типа, черпающие энергию для изменения положения исполнительного механизма из процесса, называются Регуляторами прямого действия.
После формулировки основополагающего решения заключающего в использование обратной связи по измеряемым выходным параметрам был определен математический принцип использования этой связи. Он гласит, что для регулирования технологического параметра требуется величину управляющего сигнала рассчитывать и устанавливать пропорционально величине изменения регулируемого выходного параметра. Применение этих простых и понятных вызвало революцию в управлении технологическими процессами.
Исследования показали, что обратная связь присутствует в живой и неживой природе. Все живые существа имеют массу внутренних контуров регулирования. Все стабильные процессы на Земле являются такими только потому, что постоянно идет регулирование с использованием обратной связи.
Потребовался математический аппарат для однотипного описания свойств объектов управления, обратной связи и управляющих устройств. Такой математикой стали преобразования Лапласа. В свою очередь, частотная теория позволила разработать математические основы создания алгоритмов для модулей регулирования. Для реализации математических решений были разработаны аппаратные средства - регуляторы. Они показали высокую эффективность. Без них стало нельзя обходиться. В конкурентной борьбе аппаратные регуляторы помогали фирмам выигрывать. Автоматика стала наукой и модной дисциплиной.
Обратная связь может быть положительной и отрицательной. При положительной связи значение выходного параметра накладывается на задание. Положительная обратная связь— связь, при которой изменение выходного сигнала системы приводит к изменению входного сигнала, которое способствует дальнейшему увеличению отклонению выходного сигнала от задания. Положительная обратная связь ускоряет реакцию системы на изменение входного сигнала, поэтому её используют в ситуациях, когда требуется быстрая реакция в ответ на изменение внешних параметров. В то же время положительная обратная связь приводит к неустойчивости и возникновению качественно новых (автоколебательных) систем.
Если цифровой логический элемент либо операционный усилитель охватить небольшой положительной обратной связью, получится схема с гистерезисом (или триггер Шмидта), которая с успехом применяется для устранения дребезга контактов, ложных срабатываний датчиков (или кабельных приёмников), состояния «неопределённости» от влияния помех. Пример из другой области: рост населения Земли и развитие технологии находятся в положительной обратной связи. Положительная обратная связь вызывает движение по гиперболе.
Значительно более используема отрицательная обратная связь. Отрицательная обратная связь (ООС) — вид обратной связи, при котором изменение выходного сигнала системы приводит к такому изменению входного сигнала, которое противодействует первоначальному изменению. При отрицательной обратной связи задание сравнивается (вычитание) со значением выходного параметра. Отрицательная обратная позволяет создавать устойчивые системы. Отрицательная обратная связь делает систему более устойчивой к случайному изменению параметров. Отрицательная обратная связь широко используется живыми системами разных уровней организации — от клетки до экосистем.
Регуляторы в подавляющем большинстве работают по принципу отрицательной обратной связи. В сумматоре определяется величина рассогласования «е» (отклонения). Изменение величины управляющего сигнала происходит на основании значения рассогласования по заложенным алгоритмам и уравнениям.
На рисунке Z – заданное значение технологического параметра, е – рассогласование, Р – регулирующий блок, U - сигнал на исполнительный механизм, f – внешние возмущения, ОУ – объект управления, Y – регулируемый параметр состояния объекта. Сумматор вычитает из задания сигнал обратной связи. Принцип функционирования регулирующей системы. В сумматоре постоянно происходит сравнение (вычитание) текущего значения регулируемой величины у с заданным значением Z, определяя отклонение е = z – у. Изменение управляющего сигнала на выходе регулятора зависит от изменения отклонения. Если текущее значение равно заданному значению, то регулятор не меняет управляющее воздействие (система работает в установившемся режиме). В противном случае управляющее воздействие на объект u изменяется в соответствии с величиной отклонения по алгоритмам, заложенным в регулятор. Чем больше отклонение регулирования (и дольше оно наблюдается), тем больше изменение управляющего воздействия и тем больше соответствующее изменение энергобаланса в объекте регулирования.
2.1. Обработка информации.
Мы видим, что, исходя из своей сути, процесс автоматического регулирования и управления содержит много действий и взаимодействий составляющих элементов. Чтобы получился ожидаемый результат, следует выполнять действия в определенной последовательности. Иначе произойдет непредвиденное и часто опасное событие. Например, если при ядерной реакции несвоевременно опустить тормозящий стержень, произойдет ядерной взрыв. Действия должны быть логичными и вытекать друг из друга. Последовательность взаимосвязанных действий называется алгоритмом.
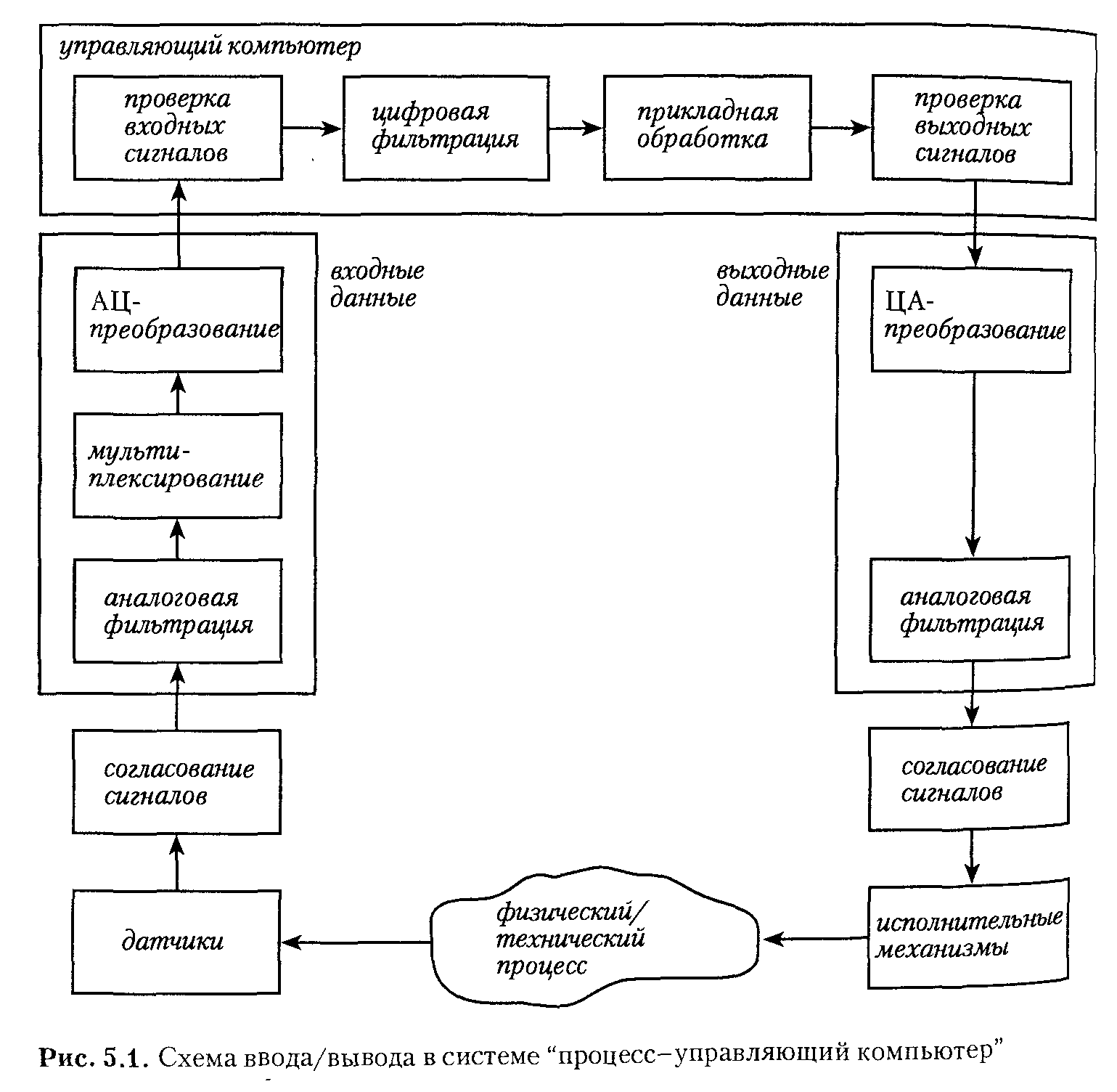
На рисунке 5.1 в первом, укрупненном, представлении дана последовательность работ и действий по получению и организации движения информации в системе контроля и регулирования с использованием контроллера/компьютера.
2.2 Составляющие алгоритма при опросе и первичной обработке параметров
Контроллер инициализирует получение сигнала (информации) от датчика. В датчике часто закладывается аналоговые фильтры/сглаживатели, которые удаляют случайные шумы или явные нарушения (выбросы) сигнала. Мы уже отмечали, что датчики вырабатывают величины сигнала, входящие в стандартный ряд. Это требуется для согласованного приема и обработки сигналов. Поэтому в программе указывается тип и характеристики входного сигнала, его нижние и верхние границы. Эти данные должны списываться непосредственно с самого датчика или, в крайнем случае, с паспорта датчика. Таким образом, мы обеспечиваем согласованную обработку сигнала в разных частях и блоках системы. В описании алгоритма в табличном виде мы указываем эту информацию в графе параметры сигнала. Рассмотрим движение сигнала и информации.
Сигнал в контроллер поступает в аналоговом виде и должен преобразовываться в числовой вид. Эту роль выполняют аналогово-цифровые преобразователи (АЦП) на 4 или 8 или 16 или 32 или 64 входа. Больше входов я не встречал. Наиболее распространены АЦП на 8 входов для аналоговых сигналов и АЦП на 16 входов для дискретных сигналов. В АЦП реализовано решение, называемое мультиплексированием. Оно позволяет устройству последовательно подключать датчики для съема информации, а контроллер обращается к данным нужного ему для алгоритма параметра.
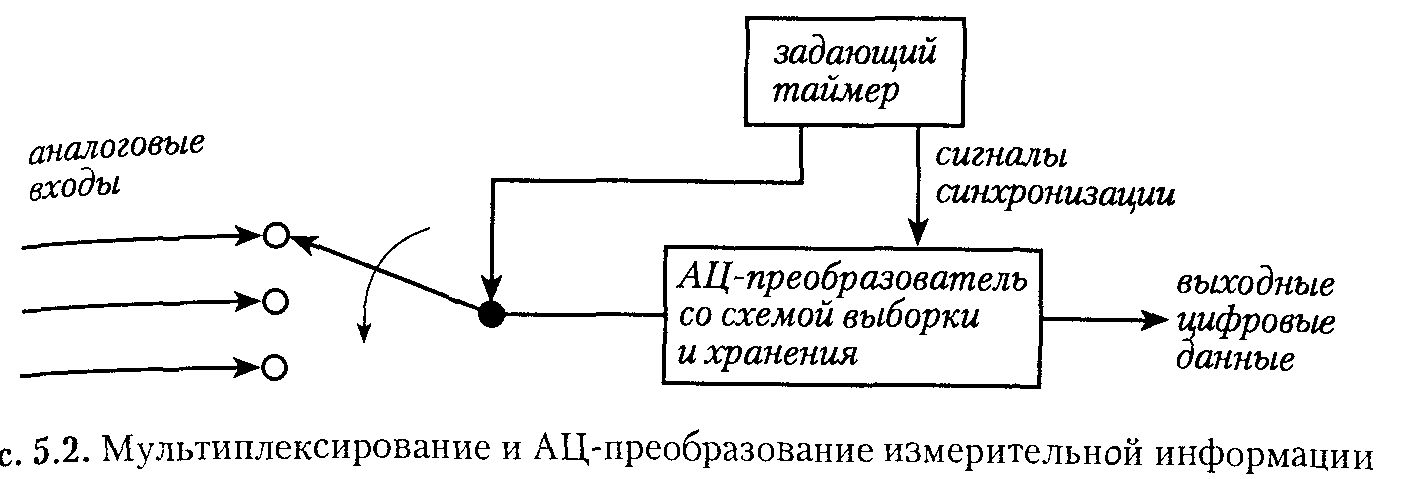
В современных электронных полупроводниковых мультиплексорах коммутация составляет несколько микросекунд. Они имеют хорошие эксплуатационные характеристики. Но большую опасность представляют для них большие токи утечек и скачки напряжения на входе. Сгорает операционный усилитель в АЦП - преобразователях. Для предотвращения рекомендуется использование защитных барьеров, сбрасывающих лишнее напряжение и ток на землю через систему заземления. Цепи электропитания модулей должны быть заземлены.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
