
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
2. Для ‘электрической RLC цепочки получаем следующее дифференциальное уравнение:
![]()
3 Согласно закону охлаждения Ньютона, скорость изменения температуры тела, т. е. производная dT/dt , пропорциональна разности температур тела и окружающей среды - dT/dt = T – a, где а - const.
4 Скорость радиоактивного распада (количество ежесекундно испускаемых частиц, равное числу ежесекундно распадающихся ядер) прямо пропорциональна только наличному в данный момент количеству радиоактивных ядер.
dN/dt = - ?N(t). (где: N(t),см-3 - ядерная концентрация радиоактивных ядер в рассматриваемый момент времени t; dN/dt, см-3с-1 – мгновенное значение скорости радиоактивного распада, то есть количество распадающихся в 1 см3 ядер за 1 с (в данный момент времени);
Список законов физики с таким математическим описанием можно значительно продолжить.
4.3.1 Пример идентификации апериодического объекта по переходной кривой
Так как многие объекты в первом приближении описываются апериодическим звеном, рассмотрим обработку переходной характеристики такого объекта. Переходной характеристикой h(t) называется реакция объекта на единичное ступенчатое воздействие (сигнал) при нулевых начальных условиях, т. е. при х(0) = 0 и у(0) = 0. Процесс получения передаточной функции объекта, исходя из данных о переходном процессе, называется идентификацией объекта.
Предположим, что при подаче на вход некоторого объекта ступенчатого воздействия была получена переходная характеристика (см. рисунок 1.31). Требуется определить параметры передаточной функции.
Передаточная функция апериодического звена имеет вид
![]()
(инерционное звено с запаздыванием).
Параметры передаточной функции: К - коэффициент усиления, Т - постоянная времени, ? - запаздывание. Они определяются из характеристик кривой разгона рисунка 1.31
Коэффициентом усиления К называется величина, показывающая, во сколько раз данное звено усиливает входной сигнал (в установившемся режиме), и равная отношению выходной величины у ко входной величине х:
![]() , Установившееся значение выходной величины ууст - это значение у при t > ?.
, Установившееся значение выходной величины ууст - это значение у при t > ?.
Постоянная времени Т - Для рассматриваемой передаточной функции 1-го порядка Т определяется просто: сначала проводится касательная к точке перегиба, затем находятся точки пересечения с осью времени и асимптотой yуст; время Т определяется как интервал времени между этими точками.
Запаздыванием ? называется промежуток времени от момента изменения входной величины х до начала изменения выходной величины у.
Передаточная функция звена запаздывания: W(s) = e - ? s.
Другой пример типового звена – интегрирующее звено: Его передаточная функция
![]() .
.
Временные характеристики
![]() ,
,
![]() .
.
Графики импульсной и переходной функции показаны на рисунке:
Частотная характеристика
![]() ,
,
![]() .
.
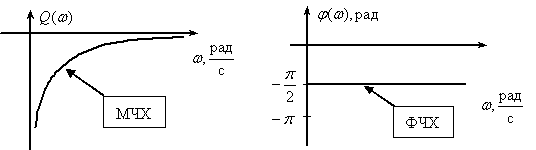
Это звено смещает гармонический сигнал любой частоты на угол ![]() в сторону отставания выходной величины от входной.
в сторону отставания выходной величины от входной.
5.1 Простые структурные схемы и их преобразование.
Систему автоматического управления (САУ) можно представить в виде совокупности динамических звеньев с известными математическими моделями. Рассмотрим структуру типичной САУ –

Где ![]() – передаточные функции соответственно объекта, датчика и регулятора,
– передаточные функции соответственно объекта, датчика и регулятора, ![]() – изображения задающего, возмущающего и выходного сигналов.
– изображения задающего, возмущающего и выходного сигналов.
В процессе анализа и синтеза САУ необходимо получать передаточные функции САУ, которые связывают выходную переменную с заданием и возмущением в САУ, по известным структурной схеме и передаточным функциям динамических звеньев, входящих в состав САУ.
Эта задача решается путем преобразования (сворачивания) структурной схемы к одному динамическому звену с искомой передаточной функцией на основе использования правил эквивалентных преобразований структурных схем и принципа суперпозиции (наложения).
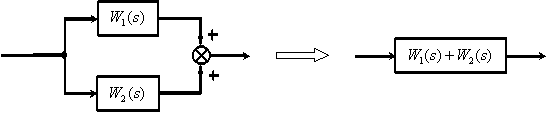
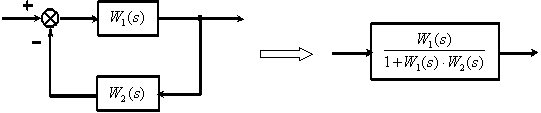
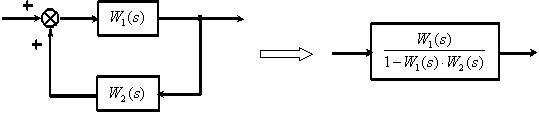
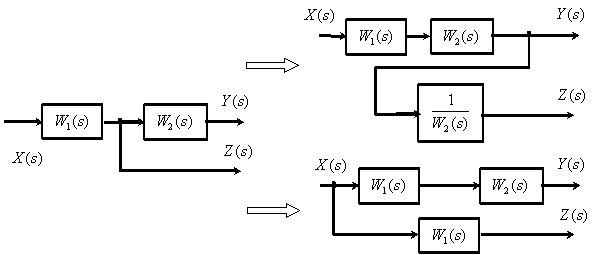
Рассмотрим правила эквивалентных преобразований, не изменяющих свойств систем и необходимых для нахождения передаточной функции:
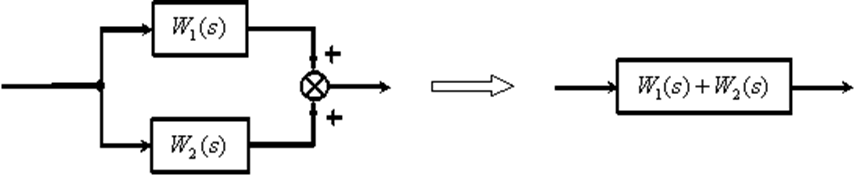
Последовательное соединение динамических звеньев.![]()

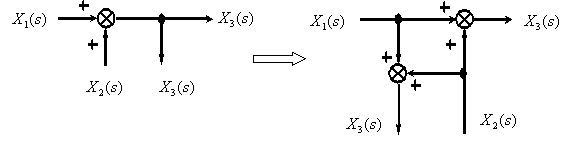
Применим рассмотренные правила для упрощения структурной схемы
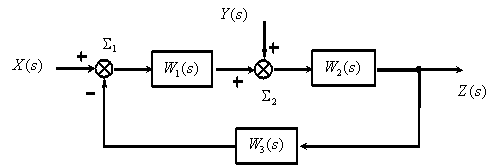
Рис. 1
После преобразований по указанным правилам получим свернутую структурную схему.
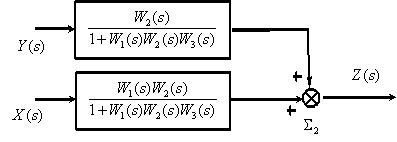
Операторное уравнение этой структуры будет иметь вид:
|
 (1)
(1)Уравнение показывает, что ![]() является линейной комбинацией изображений входных сигналов, взятых с коэффициентами
является линейной комбинацией изображений входных сигналов, взятых с коэффициентами ![]() и
и ![]() . Выясним смысл этих коэффициентов на примере коэффициента
. Выясним смысл этих коэффициентов на примере коэффициента ![]() . Для этого положим в (1)
. Для этого положим в (1) ![]() , тогда получим –
, тогда получим –
| (2) |
Таким образом, из (2) следует, ![]() – это передаточная функция динамического звена, к которому свернута структурная схема в предположении, что изображения всех входных сигналов, кроме
– это передаточная функция динамического звена, к которому свернута структурная схема в предположении, что изображения всех входных сигналов, кроме ![]() , равны нулю.
, равны нулю.
Теперь становится ясным смысл и самого операторного уравнения (1), описывающего систему. Он заключается в том, что реакция линейной системы на совместно действующие входные сигналы может быть определена в виде суммы частичных реакций, каждая из которых вычисляется в предположении, что на систему действует только один входной сигнал, а остальные равны нулю. Это формулировка фундаментального принципа, который называют принципом наложения или суперпозиции.
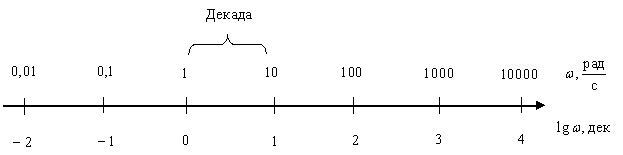
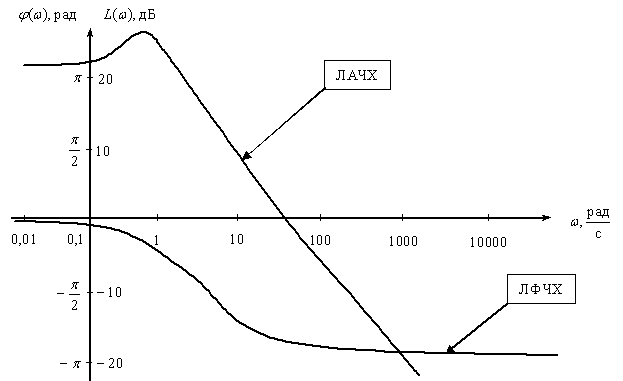
5.2 Логарифмические частотные характеристики
Значения амплитуд и частот существенно различаются друг от друга. Кроме того, и сама величина диапазона частот, в котором характеристики конкретного устройства представляют интерес, может быть значительна, от долей герц до десятков мегагерц. Решение этой проблемы лежит в использовании логарифмических масштабов в частотных характеристиках.
В технике связи используют понятие коэффициента передачи по мощности для четырехполюсника, являющегося отношением мощности на входе к мощности на выходе.
![]() . Для этого коэффициента в технике связи используется логарифмическое представление, логарифмический коэффициент передачи по мощности –
. Для этого коэффициента в технике связи используется логарифмическое представление, логарифмический коэффициент передачи по мощности –
Формула (1) в децибелах имеет вид: Логарифмический коэффициент усиления можно выразить через отношение выходного и входного напряжений По аналогии, в теории автоматического управления такое представление используют для выражения амплитуды частотной характеристики в децибелах –
По оси частот в теории автоматического управления так же используют логарифмический масштаб на основе десятичного логарифма частоты. При этом ось частот будет иметь следующий вид –
Логарифмическая шкала не имеет нуля и может пересекаться вертикальной осью в любом месте, что может быть интересно исследователю. Логарифмической амплитудной частотной характеристикой (ЛАЧХ) динамического звена называют такое представление амплитудной частотной характеристики (АЧХ), в котором модуль (амплитуда) частотной характеристики выражен в децибелах, а частота – в логарифмическом масштабе. Логарифмической фазовой частотной характеристикой (ЛФЧХ) динамического звена называют такое представление фазочастотной характеристики (ФЧХ) , в котором частота выражена в логарифмическом масштабе.
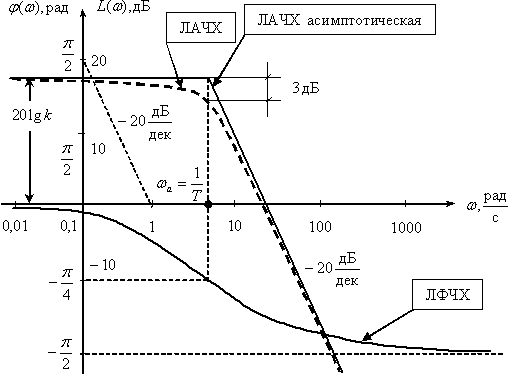
5.2.2 Логарифмические частотные характеристики апериодического звена
В этом случае, при частоте ? =1/Т, имеем Как мы увидим в дальнейшем, при синтезе и анализе систем бывает удобнее пользоваться не точными, а асимптотическими характеристиками 5.3 Удобства использования логарифмических характеристик. Пусть имеется объект управления:
Его передаточная функция –
Амплитудная частотная характеристика
4.1.1 Порядок расчета устойчивости по критерию Михайлова: Записывается характеристическое уравнение замкнутой системы:
По виду годографа Михайлова судят об устойчивости системы. Устойчивые годографы проходят поочередно При оценке устойчивости систем одного факта устойчивости недостаточно. Необходимо еще оценить величину запаса устойчивости, т. е. степени удаленности системы от границы устойчивости. Система, которая теоретически является устойчивой, но находится очень близко к границе устойчивости, практически при ее реализации может оказаться неустойчивой как вследствие неточности математического описания системы, использованного при оценке устойчивости, так и из-за изменения во времени параметров системы. Основное распространение в качестве меры запаса устойчивости получили вытекающие из критерия Найквиста две величины – запас устойчивости по фазе 4.1.2 Критерий Найквиста
Данная выше формулировка критерия Найквиста относится к системам, которые являются устойчивыми в разомкнутом состоянии. В случае одноконтурной системы устойчивость в разомкнутом состоянии всегда обеспечивается, если система состоит только из устойчивых звеньев. При наличии местных обратных связей должна быть еще проверена устойчивость образованных этими связями контуров. Для этого, в свою очередь, может быть применен критерий Найквиста или любой другой. Для систем, неустойчивых в разомкнутом состоянии, критерий Найквиста имеет такую формулировку: для устойчивости системы в замкнутом состоянии амплитудной фазовой характеристики разомкнутой системы должна охватывать точку (-1, j0). При этом число пересечений ею отрицательной действительной полуоси левее точки (-1, j0) сверху вниз должно быть на
В соответствии с критерием Найквиста, об устойчивости можно судить не только по а. ф ч. х., но и совместно по амплитудно-частотной и фазово-частотной характеристикам. Обычно при этом пользуются логарифмическими характеристиками, что представляет большое удобство в силу простоты их построения. Согласно критерию Найквиста, для системы, устойчивой в разомкнутом состоянии, условием устойчивости ее в замкнутом состоянии является не охват а. ф.х. W(j?) точки (-1, j0). Последнее имеет место, если при частоте, на которой A(?) =1, фаза меньше 180°. На рис. 5.4 б. показаны логарифмические характеристики, Здесь изображены одна логарифмическая амплитудная частотная характеристика L(?) и четыре варианта логарифмической фазной характеристики ?(?) . Если учесть при этом, что значению А = 1 соответствует L = 20lg1=0, критерий устойчивости Найквиста для систем, устойчивых в разомкнутом состоянии, сводится к тому, что л. а.ч. х. должна пересечь ось абсцисс раньше, чем фаза окончательно перейдет за значение -180°. Или иными словами, на частоте среза ?ср величина фазы должна быть меньше 180°. Изложенное иллюстрируется рис. 5.4, б. В случае л. ф.х. 1 и 4 замкнутая система устойчива. Л. ф.х. 2 соответствует нахождению замкнутой системы на границе устойчивости, а л. ф.х. 3 – неустойчивой замкнутой системе. Для астатических систем и систем, неустойчивых в разомкнутом состоянии, условием устойчивости в замкнутом состоянии является следующее: при положительной л. а.ч. х. число пересечений л. ф.х. уровня -180° снизу вверх должно быть на k/2 раз больше числа пересечений в обратном направлении. При оценке устойчивости систем одного факта устойчивости недостаточно. Необходимо еще оценить величину запаса устойчивости, т. е. степени удаленности системы от границы устойчивости. Система, которая теоретически является устойчивой, но находится очень близко к границе устойчивости, практически при ее реализации может оказаться неустойчивой как вследствие неточности математического описания системы, использованного при оценке устойчивости, так и из-за изменения во времени параметров системы. Основное распространение в качестве меры запаса устойчивости получили вытекающие из критерия Найквиста две величины – запас устойчивости по фазе ?? и запас устойчивости по амплитуде ?L в логарифмическом масштабе. Эти величины показаны на рис. 5.4, б для системы с л. ф.х., представленной кривой 1. Запас устойчивости по амплитуде определяется величиной допустимого подъема л. а.ч. х., при котором система окажется на границе устойчивости. Запас устойчивости по фазе определяется величиной по фазе, которую остается до частоты среза, чтобы система оказалась на границе устойчивости. Рекомендуется выбирать запас устойчивости по фазе больше 30° , а запас устойчивости по амплитуде больше 6 дБ. Последнее соответствует примерно двойному запасу коэффициента передачи по устойчивости. 5 Синтез линейных систем автоматического управления. Разработка математических описаний объектов, сначала разомкнутых, а затем замкнутых, с анализом устойчивости таких систем привела к пониманию необходимости добавки корректирующих звеньев в систему управления. Этим занимается в теории автоматического управления раздел синтеза автоматических систем. Корректирующие звенья исправляют амплитудно-частотные и фазовые характеристики автоматической системы так, чтобы выполнялись требованиям по критериям устойчивости.
Передаточная функция замкнутой системы имеет вид: W(p) = K(p)Wo(p) /(1+K(p)Wo(p)). 5.1 Подбор передаточных функций звеньев называется синтезом. Основные этапы синтеза системы: 1) Задаться желаемой передаточной функцией замкнутой системы Фжел(p), при которой обеспечивается желаемая переходная функция системы. 2) Определить желаемую передаточную функцию разомкнутой системы (по формуле, выводимой из выражения передаточной функции замкнутой системы):
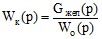
3) Найти передаточную функцию корректирующего устройства (выводится из выражения последовательно соединенных динамических звеньев).
Наиболее важным является первый этап – этап выбора Фжел(p). Её определение осуществляется на основе корневого метода, который заключается в том, что корни характеристического уравнения системы помещаются в заданные положения на комплексной плоскости, что обеспечивает желаемое быстродействие и желаемый вид переходных процессов. Примем вид желаемой Передаточной Функции замкнутой системы.
Обозначим корни характеристического уравнения p1, p2, … pn и введем понятие среднегеометрического корня характеристического уравнения: A= Поделим числитель и знаменатель желаемой ПФ системы на a0.
Желаемая передаточная функция разомкнутой системы равна,
При аналитическом синтезе системы, чтобы выбрать желаемую передаточную функцию необходимо: 1) Определить порядок n желаемой передаточной функции системы. 2) Выбрать определенный способ распределения корней характеристического уравнения на комплексной плоскости. Выбор стандартного распределения сразу определяет стандартную формулу передаточной функции. 3) Определить коэффициенты ск (для типовых способов распределения корней они приводятся в справочниках). 4) Определить величину среднегеометрического корня А (или базовой постоянной времени Т), исходя из требуемого быстродействия системы (времени переходного процесса). Пример типового распределения корней (биномиального): Все корни характеристического уравнения выбираются одинаковыми, действительными и равными (–А). Тогда желаемая передаточная функция системы:
Знаменатель данной функции представляет собой бином Ньютона. Запишем желаемые передаточные функции для различных порядков системы.
При выборе биномиальной функции для любого n переходные процессы получаются монотонными. Биномиальное распределение корней применяют в тех случаях, когда перерегулирование недопустимо. Для каждого порядка системы будет свое относительное время переходного процесса ?пп
Если прядок системы n выбран и задано желаемое время переходного процесса tпп, то среднегеометрический корень определяется по формуле:
Рассмотрим переходные функции системы при биномиальном распределении корней. Эти переходные функции будем рассматривать в относительном времени ?=А·t. Такие переходные функции будут универсальными, поскольку они подходят для любого значения А. Таким образом, чем более высокое быстродействие требуется (чем меньше tпп), тем больше по модулю должен быть среднегеометрический корень. 5.2 Стандартные корректирующие звенья: В настоящее время разработан и повсюду применяются набор стандартных корректирующих звеньев, объединенных в общую систему, которая называется регулятором. Каждый регулятор содержит нескольких простых звеньев. Обычно это звено линейного усиления, интегрирующее звено и дифференциальное звено. Они в свою очередь соединены параллельно, что приводит к сложению их передаточных функций.
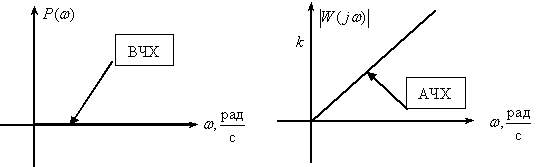
Эти звенья вырабатывают управляющее воздействие U(t). Мы рассмотрим работу регуляторов, как с математической точки зрения, так и с анализа их частотных характеристик. Усилительное звено (пропорциональное регулирование). П-закон Для пропорционального регулирования управляющее воздействие должно быть пропорционально входного сигнала (величине рассогласования). Если регулируемый параметр отклоняется от заданного значения, требуется увеличивать воздействие на объект. Коэффициент пропорциональности обозначают как K1: u = K1.e. Передаточная функция П-регулятора имеет вид: Частотные характеристики:
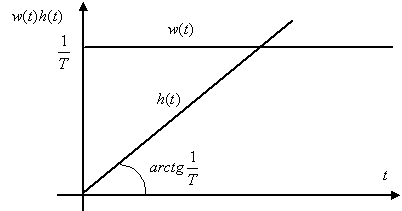
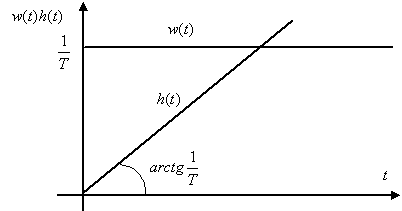
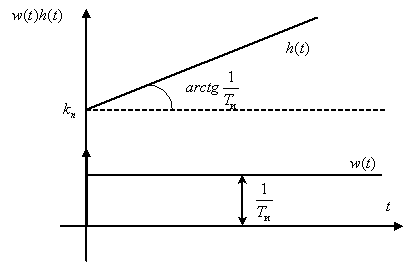
Интегрирующее звено (интегральное регулирование). И-закон Управляющее воздействие пропорционально интегралу от ошибки. То есть чем дольше существует отклонение регулируемого параметра от заданного значения, тем больше управляющее воздействие:
Передаточная функция звена: Временные характеристики
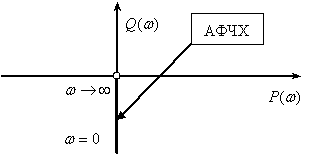
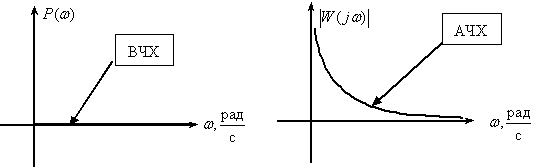
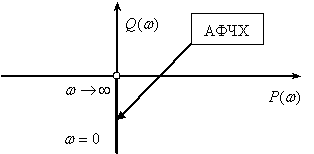
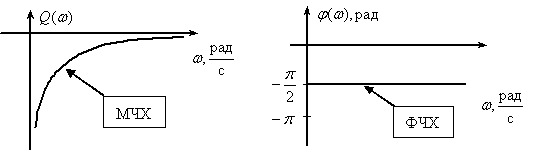
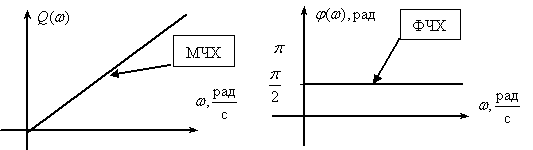
Интегральное звено запоминает значение импульса и складывает импульсы приходящие один за другим. При постоянном отклонении управляющее воздействие увеличивается со скоростью, пропорциональной величине отклонения. Например, при е = 1 скорость роста управляющего сигнала будет равна 1/Т. Частотные характеристики
Достоинство данного принципа регулирования в отсутствии статической ошибки, т. е. при возникновении ошибки регулятор будет увеличивать управляющее воздействие, пока не добьется заданного значения регулируемой величины. Недостаток – содействует неустойчивости процесса из-за отставания по фазе. Дифференцирующее звено (дифференциальное регулирование). Д-закон Регулирование ведется по величине скорости изменения регулируемой величины:
Частотная характеристика
Временные характеристики: Импульсная функция w =Т •d?/dt, Переходная функция h = Т •? При использовании дифференцирующего звена быстрый рост регулируемой величины вызовет большее управляющее воздействие. При медленном росте – меньшее воздействие. Регулятор генерирует управляющее воздействие только при изменении регулируемой величины. Например, если ошибка имеет вид ступенчатого сигнала е = 1, то на выходе такого регулятора будет наблюдаться один импульс (?-функция). В этом заключается его недостаток, который обусловил отсутствие практического использования такого регулятора в чистом виде. На практике типовые П-, И - и Д-законы регулирования редко используются в чистом виде. Чаще они комбинируются и реализуются в виде ПИ-регуляторов, ПД-регуляторов, ПИД-регуляторов. Регулирующие звенья объединяются параллельно, их выходные сигналы складываются. Эти звенья относятся к элементарным. Промышленная реализация их не сложна и не очень трудоемка. Широкий диапазон изменения коэффициентов и постоянных времени позволяет корректировать и заметно менять частотные характеристики объектов управления. Пропорционально-интегрирующее звено 5.2.1 Комбинированный ПИ-регулятор (пропорционально-интегральный регулятор): Представляет собой два параллельно работающих звена - Пропорционального и Интегрального. Данное соединение сочетает в себе достоинства обоих звеньев: быстродействие и отсутствие статической ошибки. ПИ-закон регулирования описывается уравнением
Передаточная функция
Временные характеристики можно определить по известным характеристикам усилительного и интегрирующего звеньев –
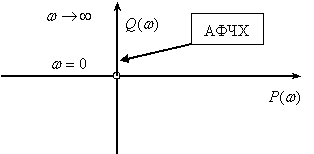
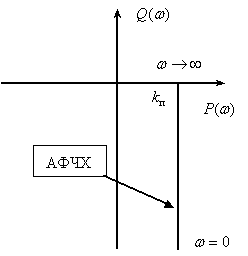
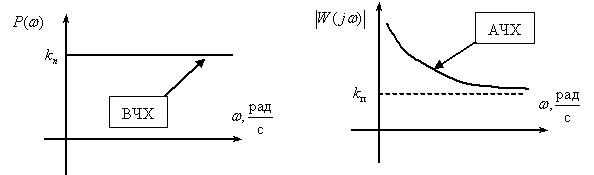
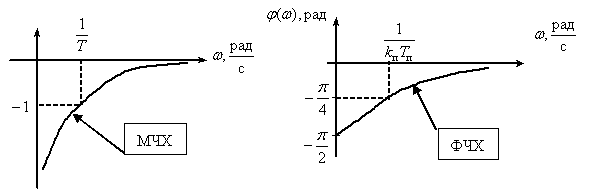
Интегральная часть обеспечивает запоминание выработанных управляющих воздействий и накопление их сумм при наличии отклонений. Частотные характеристики
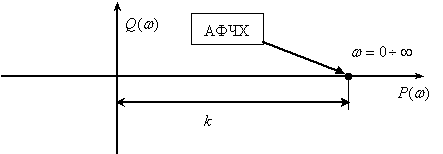
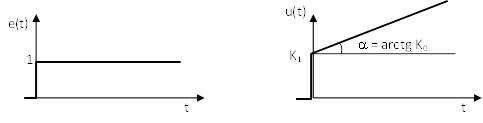
Пи - регулятор имеет два независимых параметра (настройки): K0 – коэффициент интегральной части и K1 – коэффициент пропорциональной. При возникновении рассогласования е = 1 управляющий выход изменяется, как показано на рисунке. Суммируются выходные сигналы обеих звеньев.
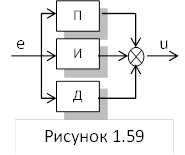
ПИ регулятор имеет хорошую АЧФХ, в виде вертикальной линии. Ее добавление к частотной характеристике объекта позволяет сдвигать результирующую характеристику в нужном направлении к точке (-1, j?). ПИД-регулятор (пропорционально-интегрально-дифференциальный регулятор) можно представить как соединение трех параллельно работающих регуляторов (см. рисунок). Закон ПИД-регулирования описывается уравнением: и передаточной функцией: WПИД(s) = K0/s + K1 + K2 s. Реакция регулятора на единичное ступенчатое изменение ошибки показана на рисунке. ПИД-регулятор является самым распространённым типовым регулятором, поскольку он сочетает в себе достоинства всех трех элементарных корректирующих звеньев. Приобретая промышленный ПИ или ПИД регулятор, вы не имеете гарантий, что с помощью трех типовых элементарных звеньев измените характеристики результирующего объекта управления и добьётесь устойчивости замкнутой системы. Чтобы повысить вероятность достижения этого результата, изготовитель обеспечивает возможность менять частотные и временные характеристики каждого из звеньев в очень широких пределах. Учитывайте возможности и диапазон параметров регулятора при его выборе для работы. 5.2.2 Правила настройки регуляторов. На практике применяются различные приближенные методики определения параметров настройки регуляторов. В качестве примера рассмотрим методику колебаний Зиглера-Никольса настройки регуляторов для устойчивых объектов, которая заключается в следующем. На реальном объекте с П-регулятором начинают постепенно увеличивать значение коэффициента K до тех пор, пока в замкнутой системе не возникнут автоколебания. Это критическое усиление регулятора Kкр и период колебаний Ткр на выходе регулятора. Затем приближенные значения параметров находятся в соответствии с рекомендациями таблицы 2.11. Здесь предполагается, что передаточная функция объекта может быть представлена в виде (апериодическое звено)
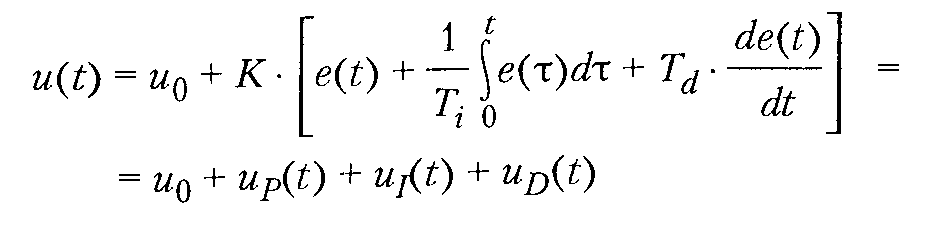
Таблица 2.11. Определение параметров настройки регулятора по методике колебаний Закон регулирования Значение параметров настройки П КП = 0.5 Kкр ПИ КП = 0,45 Kкр, ТИ= 0,85 Ткр ПИД КП = 0,6 Kкр, ТИ= 0,5 Ткр, Тд= 0,05 Тр Необходимо отметить, что получаемые параметры настройки с использованием рекомендаций табл. 2.11 следует рассматривать как начальные значения, которые в последующем требуют уточнения. При настройке ПИД-регулятора надо учитывать, что интегральная составляющая (И) позволяет обеспечить нулевую ошибку слежения, однако вследствие увеличения фазового сдвига ее действие имеет тенденцию к дестабилизации. Дифференцирующая составляющая (Д) придает регулятору прогнозирующее свойство. За счет того, что управляющее действие пропорционально скорости изменения ошибки обеспечивается стабилизирующий эффект, однако это может приводить к выработке больших управляющих сигналов. 5.3. Математическое описание ПИД регулятора. Согласно принципу обратной связи входным сигналом, как для аналогового, так и для цифрового регулятора является величина отклонения, которая определяется как разность между заданным и текущим значением регулируемого параметра (e = z – у). Выходным сигналом регулятора является величина воздействия (управляющего u), подаваемая на исполнительный механизм. В настоящее время входы и выходы реализуется в виде стандартных сигналов. В некоторых случаях выход регулятора представляет собой последовательность импульсов для исполнительного механизма, например, шагового двигателя. Уравнение классического ПИД регулятора в его классическом математическом выражении имеет вид:
ПИД регулятор вырабатывает управляющий сигнал как сумму трех составляющих. Кроме того можно задавать начальное значение выходного сигнала - UО. Первая составляющая Up пропорциональна рассогласованию e(t) (напомним, е это разница выходного сигнала и задания), вторая составляющая Ui равна интегралу (сумме) по времени отклонений всех e(t), а третья часть суммы равна производной отклонения e(t). Совместно действуют три корректирующих элементарных звена - пропорционального интегрального и регулирования по производной. Базовый сигнал UО, будет на выходе регулятора в начале процесса регулирования. Кроме того он играет роль поправочного значение, а также смещения. Параметр К – коэффициент усиления регулятора. Ti – постоянная времени регулирования, Td – постоянная времени дифференцирования. Эти параметры используются для настройки системы управления и изменения качества регулирования. Усиление регулятора – К - безразмерная величина. Постоянные времени выражаются в секундах. Выход реального регулятора всегда ограничен некоторыми пределами Umax и Umin. Интегральная часть важна для устранения статической ошибки. Она накапливает и запоминает значение своего выхода для каждого момента времени. Если замкнутая система регулирования достигла заданного значения величины e(t) и Uр(t) станут равны 0, но допустить, чтобы u(t) на выходе регулятора стала равна 0 нельзя. При нулевом выходном сигнале регулятора исполнительные механизмы закроются и технологический процесс прекратится. И тут на помощь приходит интегральная часть, которая помнит свой выходной сигнал Ui на момент, соответствующий достижения заданного значения. На выходе регулятора останется эта величина сигнал Ui. Соответственно, если снова начнет меняется величина e(t), то начнут изменяться все выходы корректирующих звеньев, включая Ui, который будет накапливать и запоминать свой выход на пути к заданному значению. Дифференциальная часть следит за скоростью изменения параметра и прогнозирует величину следующего отклонения от задания. В зависимости от прогноза она воздействует на управляющий сигнал, тормозя или ускоряя его рост. 5.3.1 Реализация ПИД регулятора в контроллерах и компьютерах. Разработчикам приходится реализовывать ПИД-регулятор на устройствах вычислительной техники в дискретном числовом виде. Выражение, которое нужно запрограммировать имеет вид: ?U(i) = U(i) - U(i-1) = ?Up(i) + ?Ui(i) + ?UD(i) где ?Up(i) = К• e(i) ?Ui(i) = Ui(i-1) + Ki • e(i) Ki = K • h/ Ti Ui(0) = UО ?UD(i) = KD • (Y(i) - Y(i-1)) Здесь учитывается то, что все действия в компьютерах (контроллерах) осуществляются пошагово. U(i) и e(i) – это значения выхода регулятора и величины рассогласования на (i) шаге. U(i-1) – это значение выхода регулятора на прошлом (i-1) шаге. Y(i) и Y(i-1) – значение регулируемой величины на текущем и прошлом шаге. Регулятор на каждом шаге рассчитывает величину приращения управляющего сигнала ?U(i), который добавляется (или вычитается) к предыдущему сигналу на исполнительный механизм. U(i) = U(i-1) + ?U(i). (i), (i-1) – номера шагов управления. Контроллер (компьютер) выдает на исполнительный механизм значение U(i). Начальное значение UО включено в состав интегральной части как ее значение на первом шаге и далее в явном виде не проявляется. При изменении свойств объекта управления регулятор будет подстраиваться под объект путем подбора нового значения Ui при достигнутом заданном режиме. В вычислительном плане алгоритм чрезвычайно прост. Требуется: ввести коэффициенты К, Ki, KD и величину UО в программу; запомнить значение выходного сигнала с регулятора U(i-1); получить значения e(i) = Y(i) - Y(i-1); рассчитать значения ?Up(i), ?Ui(i), ?UD(i) по указанным выше формулам; рассчитать значение ?U(i); найти значение U(i) = U(i-1) + ?U(i) и выдать его на исполнительный механизм; продолжить эту последовательность действий, начиная со второго пункта; 5.3.2 Устойчивость системы
Основным показателем качества системы управлания является устойчивость, так как ее назначение заключается в поддержании заданного значения регулируемого параметра или изменении его по определенному закону. Регулятор воздействует на систему таким образом, что ликвидирует это отклонение. Если система в результате этого воздействия возвращается в исходное состояние или переходит в другое равновесное состояние, то такая система называется устойчивой. Если же возникают колебания со все возрастающей амплитудой или происходит монотонное увеличение ошибки е, то система называется неустойчивой. Пусть выходной сигнал звена или системы y(t) рассматривается как сумма двух составляющих y(t) = yуст + уп(t), здесь y(t) - текущее значение где
Необходимое и достаточное условие устойчивости формулируется следующим образом: Звено или система называются устойчивыми, если переходная составляющая с течением времени стремится к нулю:
5.3.3 Прямые показатели качества К ним относятся: степень затухания ?, перерегулирование ?, статическая ошибка ест, время регулирования tp и другие. Рассмотрим их, использую нижеприведенный рисунок переходного процесса. По нему можно понять все определения для установившегося значения выходной сигнала.
|


 Если ? больше 0 решение Х будет бесконечным.
Если ? больше 0 решение Х будет бесконечным.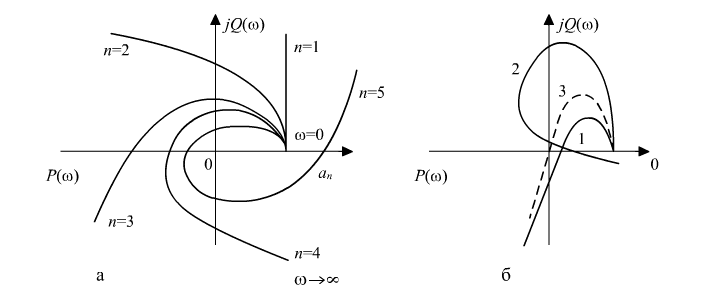

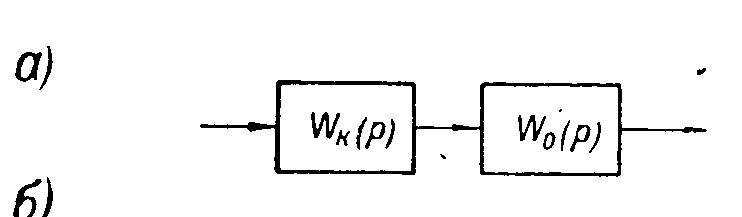 Последовательное включение корректирующего звена (замкнутая система). Здесь Wo –передаточная функция объекта управления, Wk - передаточная функция корректирующего звена.
Последовательное включение корректирующего звена (замкнутая система). Здесь Wo –передаточная функция объекта управления, Wk - передаточная функция корректирующего звена.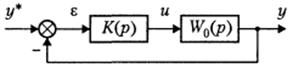 Последовательное включение корректирующего звена в замкнутой системе. К(р) - передаточная функция корректирующего звена.
Последовательное включение корректирующего звена в замкнутой системе. К(р) - передаточная функция корректирующего звена.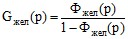
 . Выберем аn =1
. Выберем аn =1

 =
= =
= , где коэффициенты Ск = ак Аn-k, k=1…n–1, а Т = 1/А – базовая постоянная времени системы (величина обратная среднегеометрическому корню).
, где коэффициенты Ск = ак Аn-k, k=1…n–1, а Т = 1/А – базовая постоянная времени системы (величина обратная среднегеометрическому корню). 




 данием.
данием.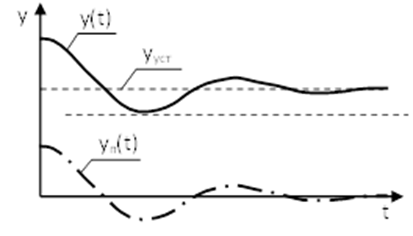

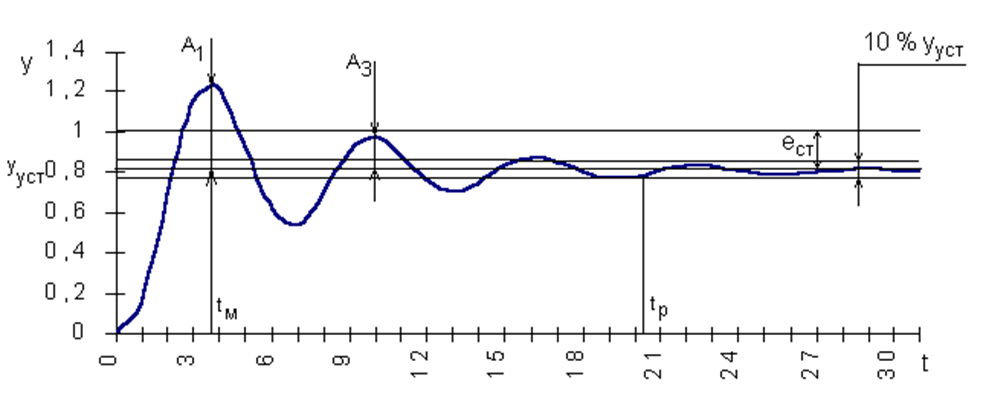
Степень затухания ? определяется по формуле

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
