
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() , где А1 и А3 - соответственно 1-я и 3-я амплитуды переходной кривой.
, где А1 и А3 - соответственно 1-я и 3-я амплитуды переходной кривой.
Колебательность переходного процесса обусловлена наличием комплексного корня ![]() в характеристическом уравнении.
в характеристическом уравнении.
Перерегулирование ? = 
где ymax - максимум переходной кривой.
Статическая ошибка ест = х - ууст, где х - заданная величина.
Время переходного процесса (Время регулирования) tp определяется следующим образом: определяется допустимое отклонение ? и строится «коридор» шириной 2?. Время tp соответствует последней точке пересечения y(t) с данной границей. Это есть время, после которого колебания регулируемой величины перестают превышать допустимого отклонения от установившегося значения.
Оптимальные значения времени регулирования, времени достижения первого максимума, перерегулирования и статической ошибки соответствуют минимальным значениям (чем меньше, тем лучше). Степень затухания, наоборот, должна быть максимально большой (максимум ? равен 1).
Время достижения первого максимума tм - определяется по графику
5.3.4. Интегральные критерии качества
Качество переходного процесса характеризует площадь по кривой этого процесса. Чем меньше площадь под кривой процессам тем лучше. Площадь под кривой какой-то функции равна интегралу от этой функции. Простейшей интегральной оценкой является линейная интегральная оценка:
:
|
 которая равна площади, заключенной между прямой
которая равна площади, заключенной между прямой
|
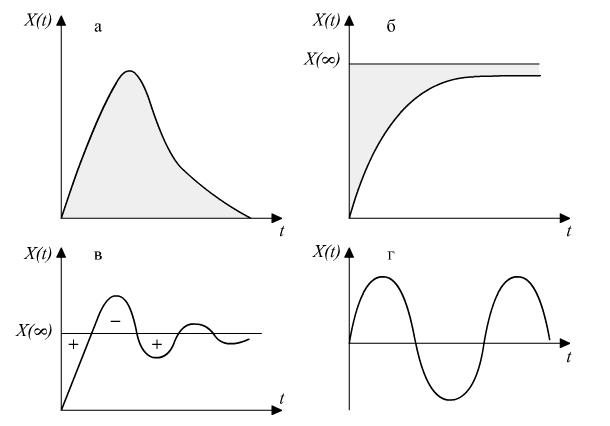
Недостатком линейной интегральной оценки является то, что ее можно применять лишь для заведомо не колебательных (апериодических) переходных процессов. Интеграл I1 вычисленный для знакопеременной кривой, будет существенно меньше интеграла, вычисленного для апериодической кривой, хотя качество переходного процесса в этом случае будет значительно хуже. Это связано с тем, что значение интеграла зависит от знаков площадей подынтегральной функции. В случае ухудшения качества переходного процесса, когда он будет иметь незатухающий колебательный характер, I1 уменьшится до нуля.
В связи с этим для колебательных переходных процессов применяют такие интегральные оценки, знакопеременность подынтегральной функции которых устранена. Таким свойством обладает квадратичный интегральный критерий
|
в котором знаки площади не принимаются во внимание. Этот критерий является наиболее широко используемым интегральным критерием. Имеются еще более сложные интегральные критерии качества, содержащие вторую и следующие производные от ?X. Их применение требует описания переходного процесса соответственно кривыми второго и следующих порядков.
6.1 Подходы к моделированию систем
При анализе начинать нужно с описания объекта управления. Стратегия управления базируется на понимании, как физический процесс реагирует на входной сигнал. Если есть модель из линейных дифференциальных уравнений, то можно получить решение из этой системы. Обычно готовых моделей нет. Тогда нужно проводить эксперименты, подавая разные типы входных сигналов.
Работу системы управления можно описать словесно. Словесное описание помогает понять принцип действия системы, ее назначение, особенности функционирования и т. д. Однако, оно не дает количественных оценок качества управления, поэтому не пригодно для нахождения характеристик и синтеза систем автоматизированного управления.
Исторически теория автоматического управления (ТАУ) построена на использовании анализ функций комплексной переменной - преобразований Лапласа. Обычно в частотных методах описывается только связь между входными и выходными сигналами. Часть внутренних переменных и связи между ними остаются скрытыми. Описания ОУ имеют меньшую размерность и меньшее число параметров.
Но теряется глубина понимания процессов. Говорят даже о «Черном ящике». Такая модель называется внешним описанием ![]() , в противоположность уравнению состояния.
, в противоположность уравнению состояния.
Известно, что любое движение, и процесс математически можно описать в виде дифференциальных уравнений. В настоящее время процессы часто моделируют набором связанных между собой дифференциальных уравнений для баланса энергии, массы, компонентов масс, сил и моментов. Состоянием называется набор всех переменных, производные которых входят в систему дифференциальных уравнений. Если известны текущие значения переменных состояния ( Х0 ) и управляющие сигналы, то можно описать дальнейшее поведение системы.
4.Математические модели в пространстве состояний
Линейная система дифференциальных уравнений для переменных состояния записывается в виде:
Основу математической модели многомерной системы во временной области составляет векторно-матричная форма записи системы дифференциальных уравнений первого порядка, которая носит название уравнения состояния. Уравнение состояния имеет вид –
| (1) |
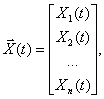
где ![]() — вектор состояния размерности
— вектор состояния размерности ![]() , который включает в себя переменные объекта, однозначно определяющие его состояние,
, который включает в себя переменные объекта, однозначно определяющие его состояние,
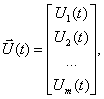
![]() — вектор управления или входа размерности
— вектор управления или входа размерности ![]() , который включает в себя сигналы, действующие на систему извне,
, который включает в себя сигналы, действующие на систему извне,
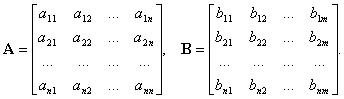
![]() — матрицы параметров, включающие в себя параметры системы, размерность которых соответственно
— матрицы параметров, включающие в себя параметры системы, размерность которых соответственно ![]() ,
,
![]() — порядок системы.
— порядок системы.
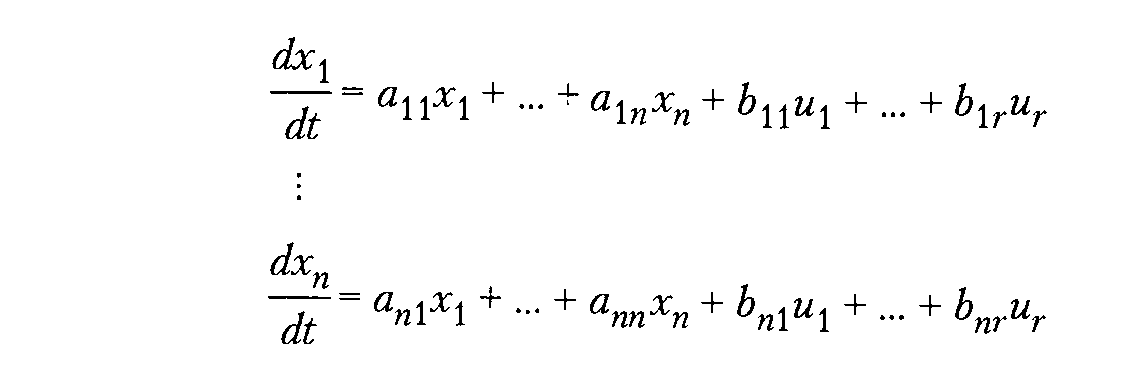
Иногда уравнение состояния (1) записывают в развернутой форме –
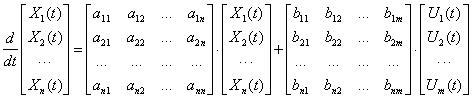 .
.
Уравнение состояния и структура полностью описывают объект управления, вектор состояния содержит переменные объекта, которые однозначно описывают его состояние.
Но в реальных системах многие компоненты не могут быть измерены или наблюдаемы с помощью датчиков. Эту ситуацию разрешает введение дополнительного уравнения выхода, которое определяет те переменные, которые доступны для наблюдения (на выходе системы) –
| (2) |
где ![]() — вектор выхода размерности
— вектор выхода размерности ![]() , который содержит переменные объекта, доступные для наблюдения,
, который содержит переменные объекта, доступные для наблюдения,

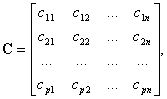
![]() — матрица параметров размерности
— матрица параметров размерности ![]() –
–
в системах управления ![]()
Уравнение выхода (2) также можно записать в развернутой форме

Состояние это вектор – столбец из переменных состояния.
![]()
Выходные величины – измерения, обозначаются через Y1, Y2,…Yp и составляют вектор столбец
![]() . Выходные переменные величины классической теории остались, но с состояниями они связаны своей системой уравнений.
. Выходные переменные величины классической теории остались, но с состояниями они связаны своей системой уравнений.
Графически уравнение состояния и уравнение выхода могут быть представлены в виде, показанном на рис. 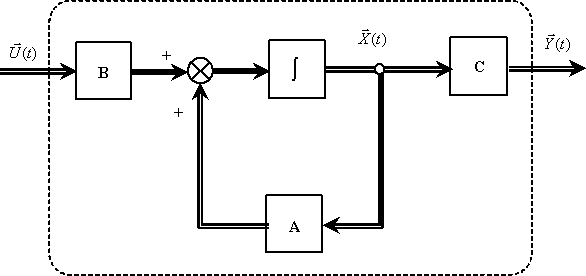

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
