
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
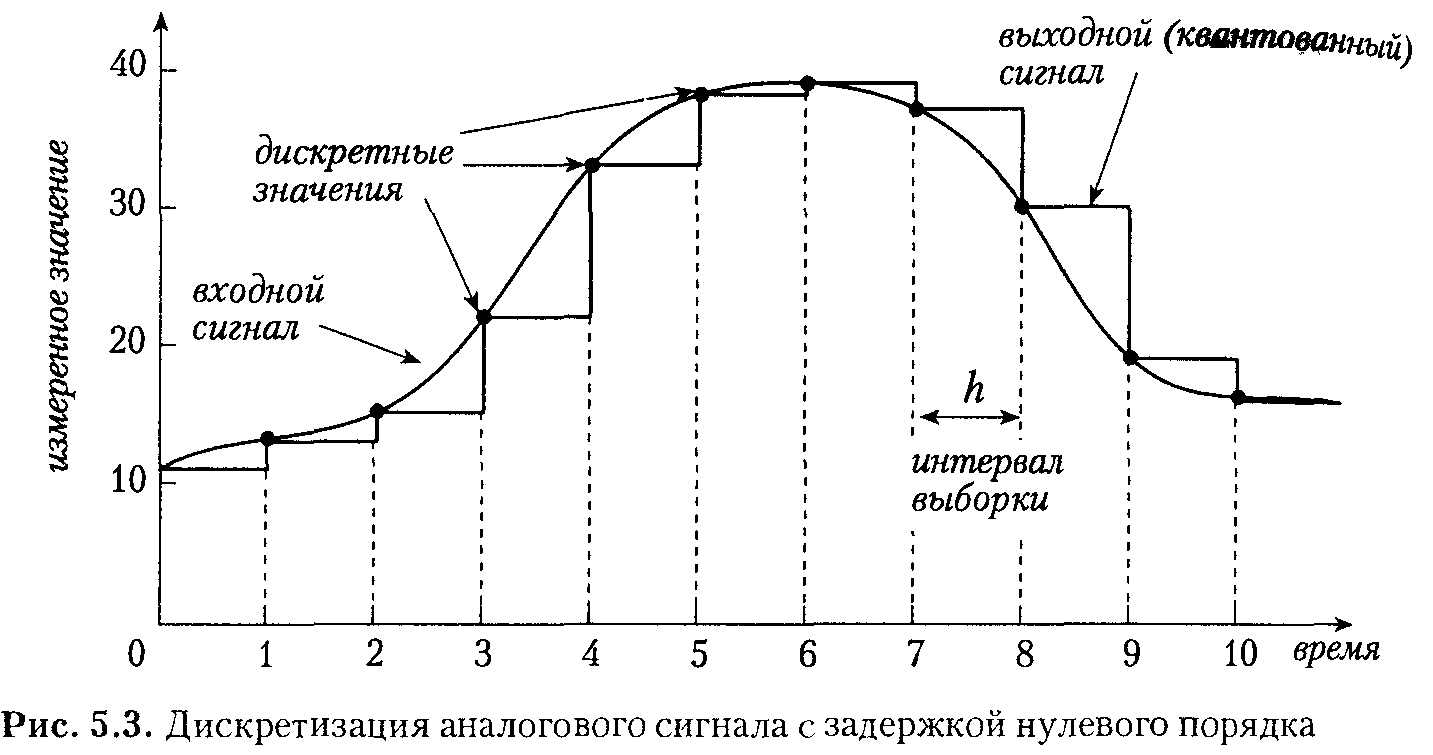
Компьютер выбирает величину параметров не непрерывно, а в некоторые моменты времени и воспринимает сигнал как последовательность дискретных значений. Дискретизация – считывание сигнала в определенные моменты времени, связана также с мультиплексированием и должна быть строго синхронизирована с ним. Значение аналогового сигнала считывается вначале каждого периода дискретизации и считается постоянным в течение времени АЦП преобразования. Эта операция называется задержкой нулевого порядка. Такой подход учитывается при численном моделировании систем и дискретизации по времени формул для непрерывных систем. Возникают дискретные представления матриц системы, в которых ее элементы рассчитываются из матрицы непрерывной системы по выражениям:
Ad = eA? , Cd = CeA? . Bd = (C•?eA? ) B. Здесь ? – частота опроса параметров.
Пример дискретизации непрерывного аналогового сигнала:
Интервал дискретизации ? должен быть достаточно коротким, чтобы правильно описывать непрерывный вид параметра. Теоретически (теория передачи информации, закон Найквиста) частота дискретизации должна в два раза и более превышать частоту наивысшей составляющей непрерывного сигнала. Частотные составляющие определяются с помощью спектрального анализа исходного непрерывного сигнала. Нужно учитывать, слишком короткий интервал опроса приводит к излишней загрузке контроллера/компьютера и неоправданной трате машинного времени.
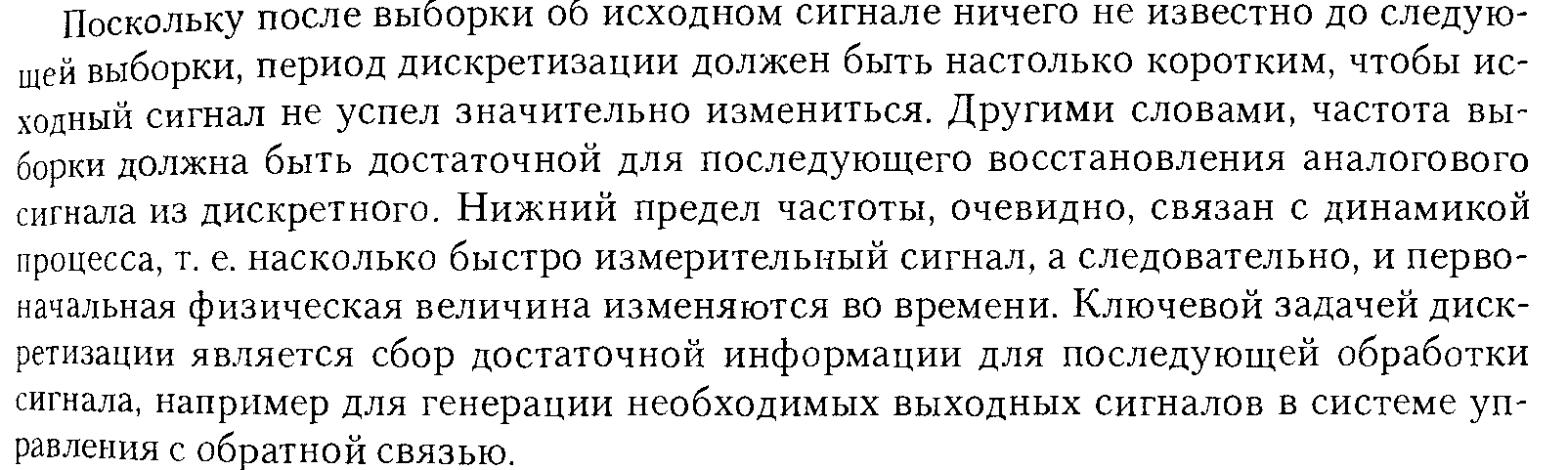

Если опрос проходит шесть или три раза период колебания, то исходный сигнал будет восстановлен правильно.

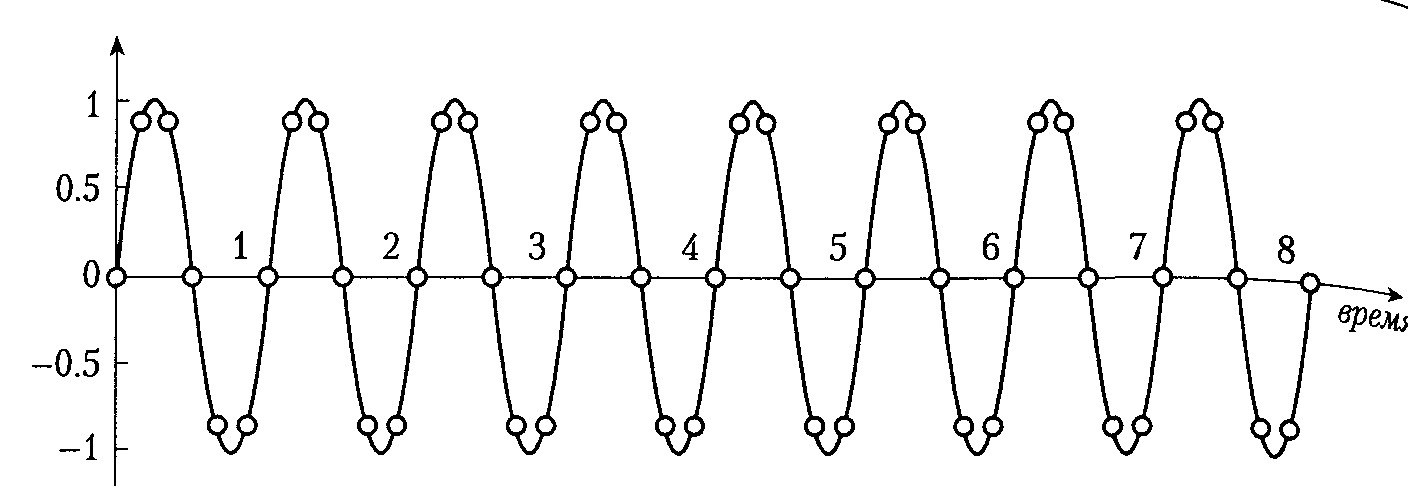
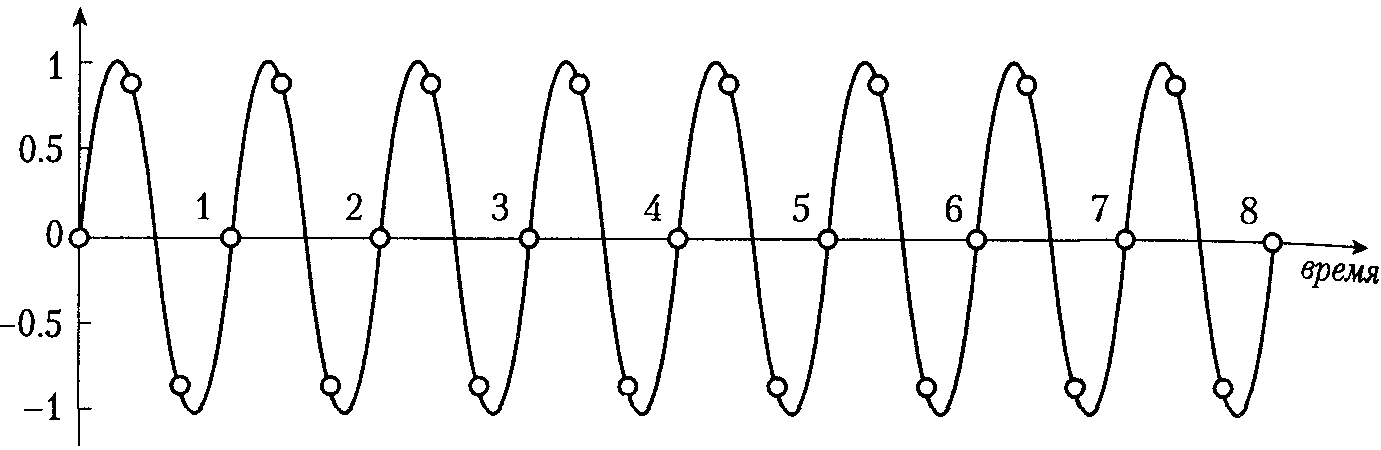
Если сигнал дискретизируется пять раз за четыре периода, то аппроксимирующая (восстановленная) синусоида будет неправильной и иметь более низкую частоту.
Обычно реальный сигнал возмущается высокочастотными шумами. Если их не выбросить из входного сигнала, то при восстановлении они будут искажать аппроксимацию, вызывать появление в ней псевдо частот в выходном сигнале. Высокочастотные компоненты можно удалить аналоговым фильтром.
Примеры псевдо частот:
Влияния помех на восстановление сигнала. Пусть у нас есть входной сигнал:
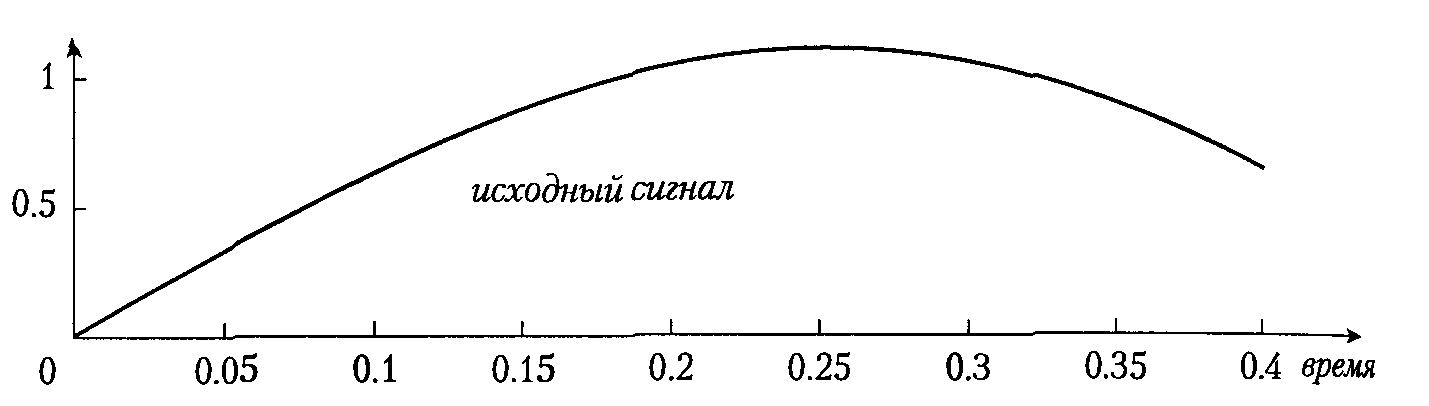
Провода сигнала не экранированы и находятся вблизи силового кабеля электропитания. Идет наводка с частотой 50 Гц.
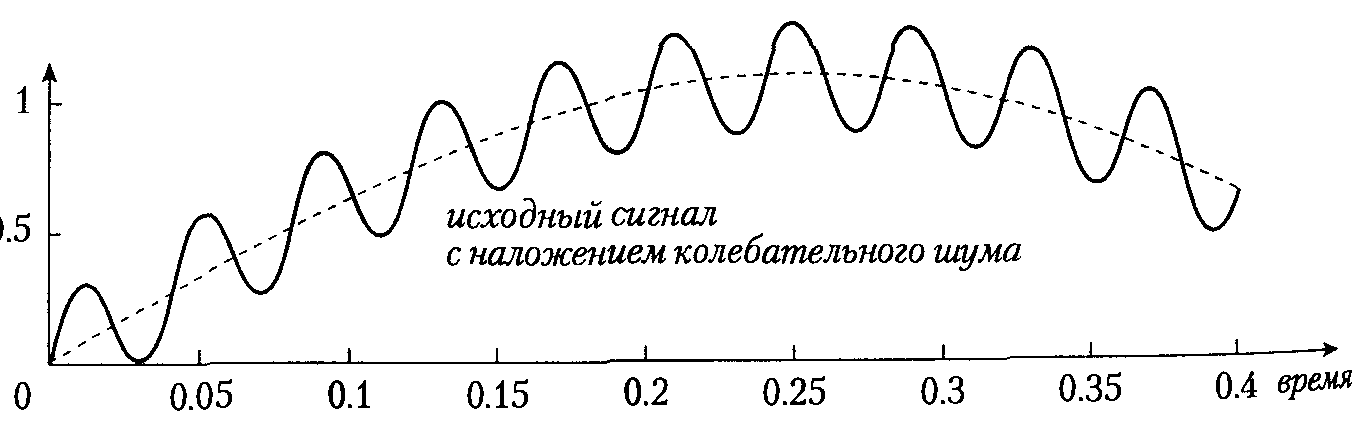
Если мы квантуем входной сигнал с частотой 60 Гц, получаем картину:
Мы нарушаем правило Найквиста. Нормальная частота опроса должна быть более 100 Гц. Аппроксимация квантованного сигнала дает псевдочастоты.
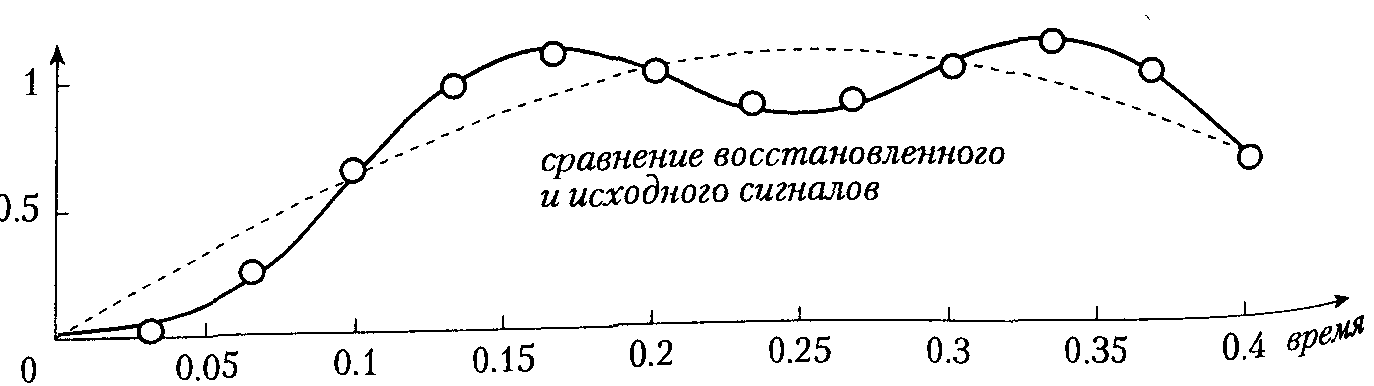
Сравнение исходного и восстановленного сигналов. Аппроксимированный сигнал содержит колебания. отсутствующие в исходном. Вопросы фильтрации помех рассмотрим позже.
Преобразование сигналов. Аналогово-цифровой преобразователь генерирует цифровой код –двоичное слово – на основе аналогового сигнала.

Входное напряжение падает на резисторах. С каждого резистора снимается величина напряжения и поступает на вход компаратора, где сравнивается с опорным напряжением. На выходе каждого компаратора появляется 0 или 1 в зависимости от соотношения этих напряжений. Двоичный код преобразуется в число и дальше участвует в расчетах. Число компараторов определяет число битов принимающих участие в преобразовании входного сигнала. Чем больше битность, тем точнее измерение. Для 12битного преобразования максимальный код (число) – 4095.
Если для передачи сигналов используется стандартный диапазон 4 -20 ма, то можно обнаружить разрыв в линии, если сигнал меньше 4ма. Если сигнал превышает верхнее значение числового кода, это говорит об исключительной или ошибочной ситуации. В алгоритмах нужно предусматривать контроль на достоверность сигнала.
Для превращения числа в контроллере в аналоговый сигнал, понятный исполнительному механизму, используется цифро-аналоговый преобразователь.


Положение ключей S1, S2,…Sn соответствует либо 0, либо 1 в цифровом слове на входе ЦАП, а выходное напряжение составляет сумму убывающих членов, умноженную на опорное напряжение:
![]() .
.
Например, в 8 битном ЦАП, двоичный байт 01011001, вызовет выходное напряжение 3,48 вольт при опорном напряжении 10 вольт.

Вопросы фильтрации



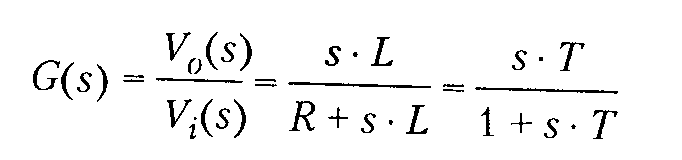
Где Т = R*С, Vi –входное напряжение, Vo –напряжение на конденсаторе. Если производная равна 0, фильтр имеет коэффициент усиления 1. Передаточная функция фильтра, полученная преобразованием Лапласа к дифференциальному уравнению, равна:
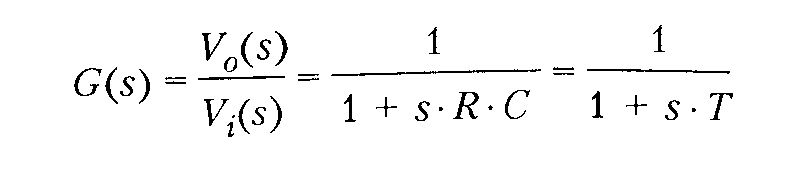
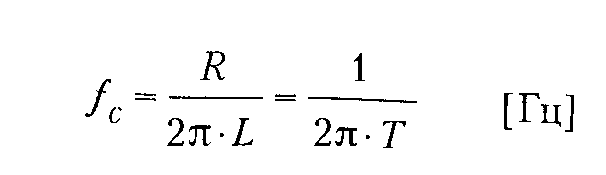
Частота среза равна 
Пассивный RL фильтр низкой частоты

Дифференциальное уравнение RL фильтра
 Где
Где ![]()
Передаточная функция RL фильтра аналогична функции RС фильтра
 Частота среза равна
Частота среза равна 
Для фильтров низкой частоты схема обработки частот имеет следующий вид:

Фильтры высокой частоты:
Поменяв местами, резистор и конденсатор в первой схеме или резистор и индуктивность во второй, получим фильтры высокой частоты:
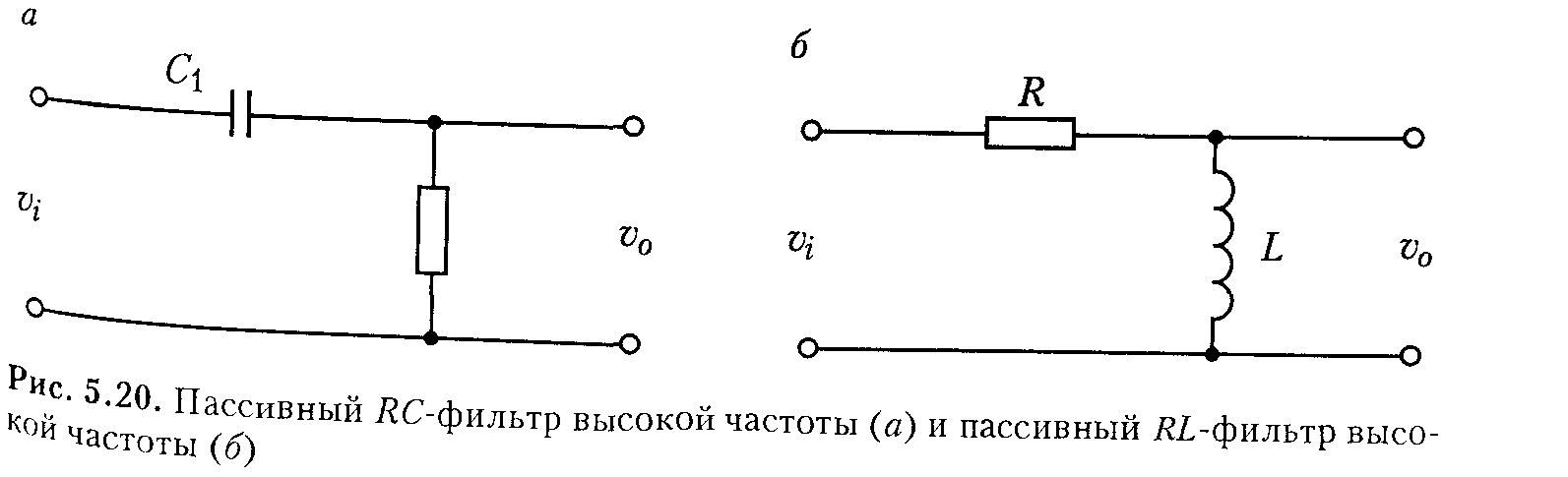
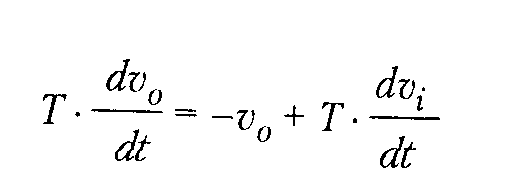
Дифференциальное уравнение для высокочастотного RC фильтра
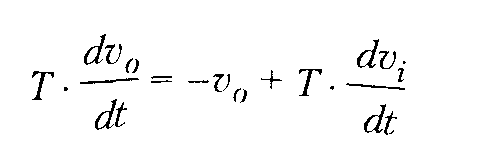 Где Т = R • C.
Где Т = R • C.
Дифференциальное уравнение для высокочастотного RL фильтра
 Где
Где ![]() .
.
Передаточная функция для высокочастотного RC фильтра:
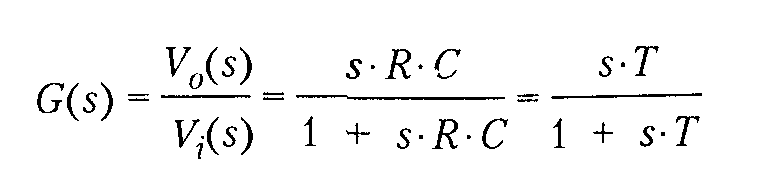
Передаточная функция для высокочастотного RL фильтра:
Для фильтров высокой частоты схема обработки частот имеет следующий вид:


для высокочастотного RC фильтра и
 для высокочастотного RL фильтра.
для высокочастотного RL фильтра.
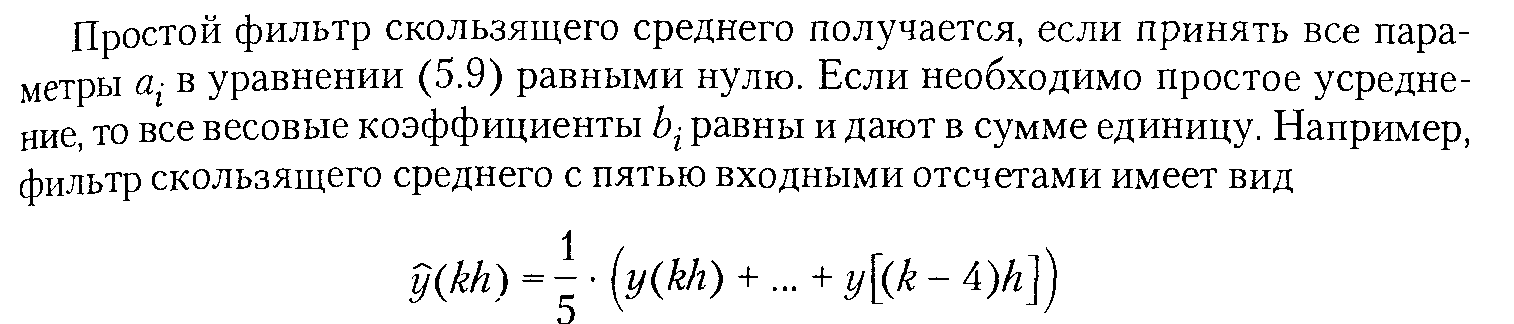
Цифровые фильтры:
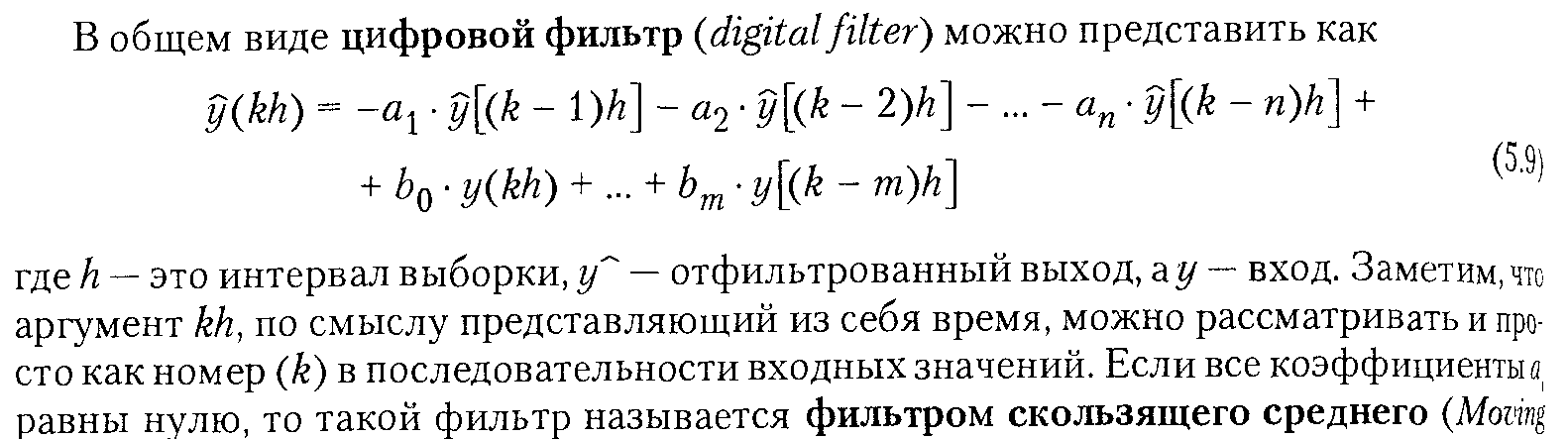
На каждом к-ом шаге опроса, мы используем сравнение (вычитание) реально измеренного, неотфильтрованного значения Y, и его оценки Y? (отфильтрованного значения), взятых с весовыми коэффициентами a1……ak, и b1,,,,,, bk. Выбор коэффициентов a1……ak, и b1,,,,,, bk представляет творческую, исследовательскую задачу и определяет качество фильтрации.
Экспоненциальный фильтр
Это фильтр первого порядка, определяемый следующим уравнением:
![]()
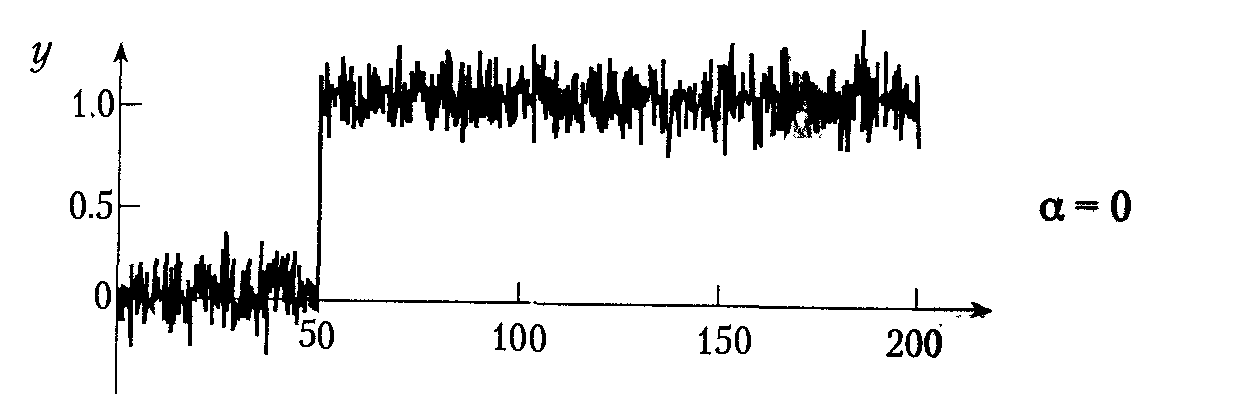
В фильтре мы указываем с помощью весового коэффициента ?, чему мы больше доверяем – измеренному значению Y или его оценки Y?. На первом шаге оценка принимается равной самому измеренному значению. Результат применения фильтра увидим на графиках:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
