
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
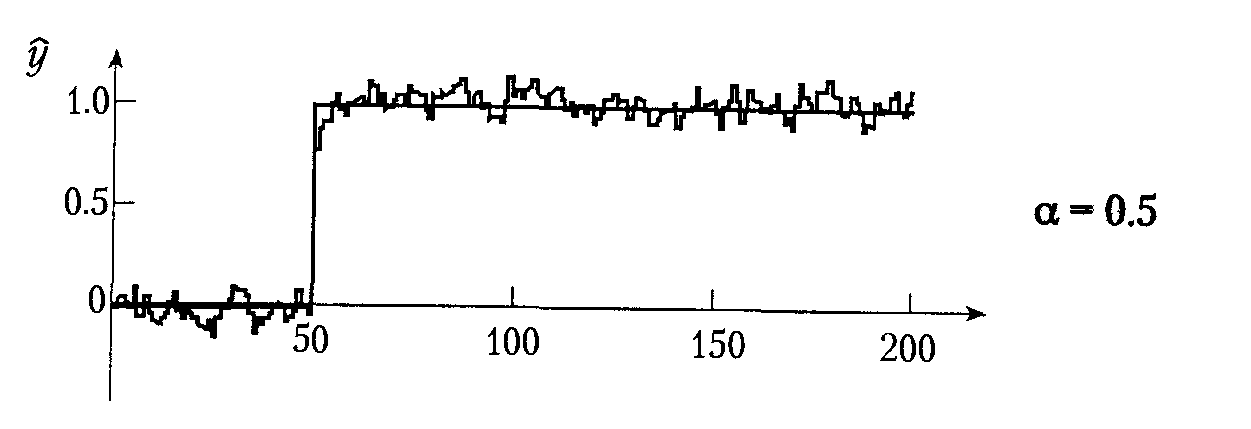
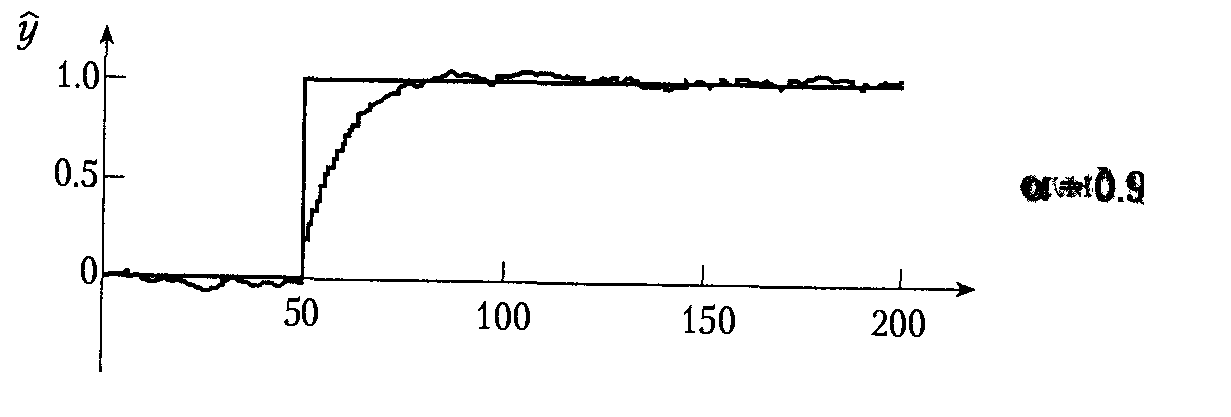
Цифровые фильтры высокой частоты:
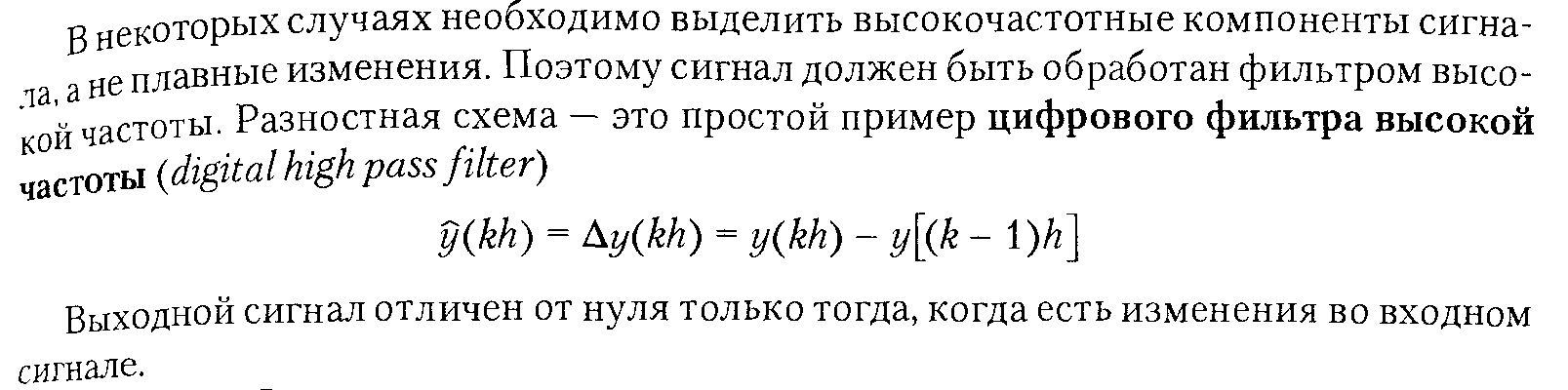
Пример работы фильтра высокой частоты;
 Исходный сигнал
Исходный сигнал
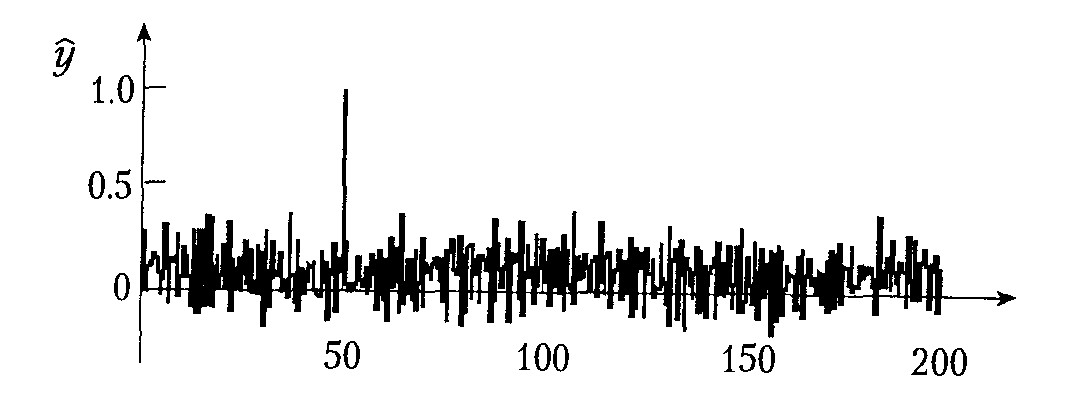 Выделенный высокочастотный сигнал.
Выделенный высокочастотный сигнал.
Основные действия первичной обработки измеренной информации;

- сохранить исходные данные;
- проверить соответствие исходных данных параметрам датчика – диапазону выходных значений и диапазону возможных скоростей изменения параметра. Если значение выходит из допустимых границ, данное исключается из дальнейшей обработки и нужно генерировать аварийное сообщение.
- Вычислить среднее значение данных за тот интевал времени, который используется в задачах конроля и управления, как единичный интевал - За секунду, минуту, час;
- применить цифровую фильтрацию и сохранить отфильтрованные данные;
- принеобходимости выполняется масштабирование, т. е. перевод параметров в одну систему измерения, например, все расходы приводятся к единице измркния М3/час;
- линеаризация параметра, например, при измерении температуры термопарой, нелинейная зависимость апроксимируется системой линейных отрезков, совпвдающих с харатеристикой термопары на отдельных участках. Это можно сделать с помощью прстой линейной звисимости:
![]()
- вавтоматических системах проволится анализ входных данных для принятия решения о дальнейших действиях, например о генерации управляющих сигналов или срабатывании защиты;
Струкруа данных для обработки измеренмй:

- шкалы параметров;

![]()

2.3 Подготовка и оформление алгоритма
Так же как и при разбиении большой системы на меньшие составляющие подсистемы, действия в алгоритме можно и нужно детализировать до такой степени, чтобы исключить возможность неоднозначного понимания смысла и обеспечить ясность в способе выполнения действия (т. е. как это сделать практически). Начинается составление алгоритма с подготовки укрупненного, но цельного и законченного варианта. Из него должно быть понятно, какое действие является началом процесса и при каких условиях алгоритм считается завершенным. Также должен указываться переход к следующему алгоритму. Это может быть и возврат на начало данного алгоритма, к началу цикла. Такой тип алгоритма называется циклическим. По нему программа может работать неопределенно долго. Алгоритм часто оформляют в виде блок - схемы
Пример простого алгоритма управления температуры нагрева пластика. В блок-схеме нет регулирования. 
Другой пример показывает использование обратной связи от дискретных датчиков положения. Они срабатывают и меняют ход выполнения программы тогда, когда произошло событие, значимое для процесса. Такие алгоритмы постоянно используются в задачах автоматического управления и следующий пример - более близкий к реальности алгоритм управления.
Управление на основании событий -
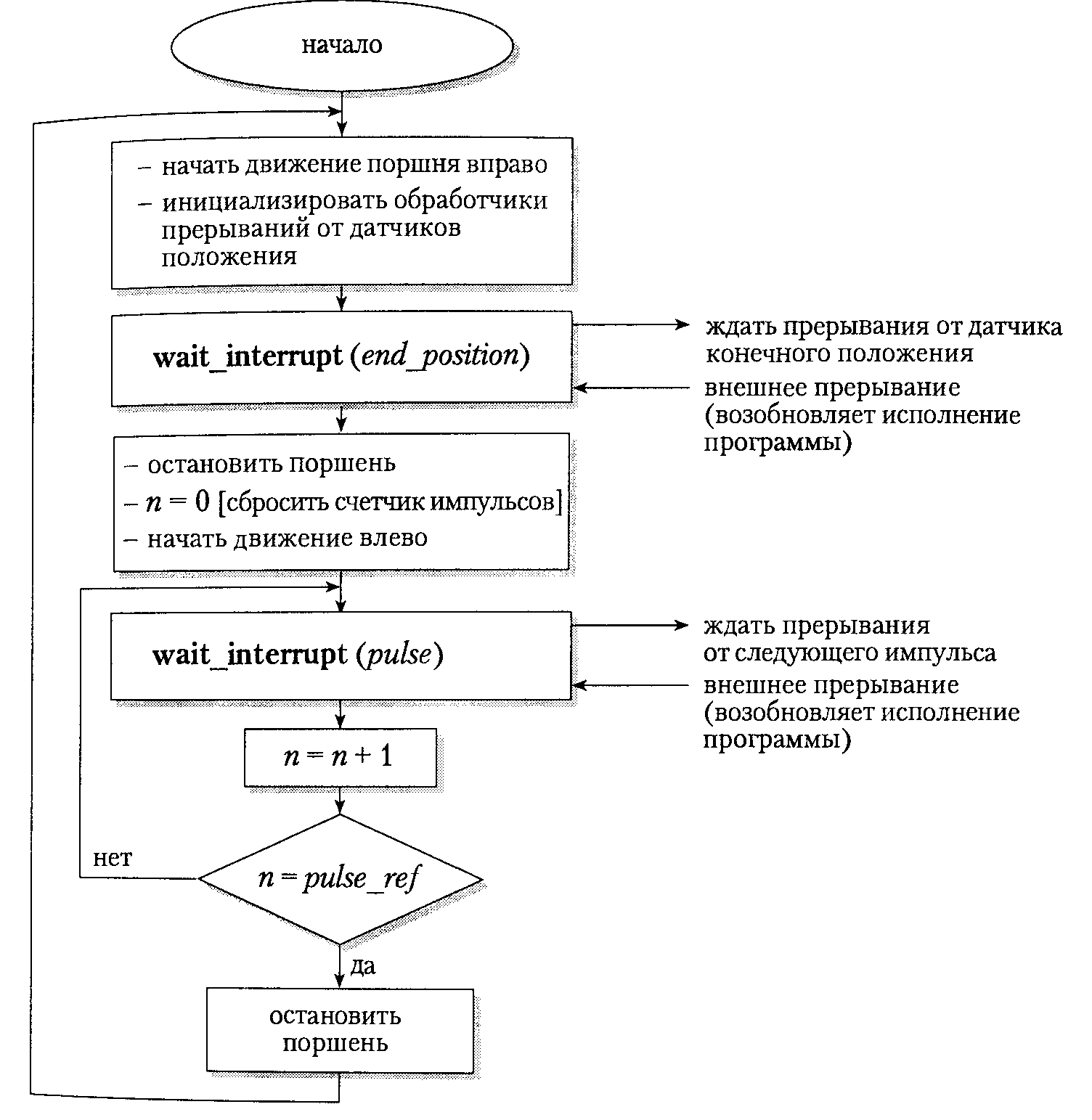 Рис 2.6
Рис 2.6
В этом случае отдельные блоки программы включаются по событиям, произошедшим на объекте управления. Если событие не происходит, то блок программы никогда не включается. Управление по событиям дает большие и гибкие возможности контроля и регулирования. В этом случае прерывается работа текущей подпрограммы и вызывается новый программный блок. В свою очередь и он может быть прерван и так далее. По мере выполнения задач подпрограмм, нужно аккуратно возвращаться к прерванным задачам и продолжать работу системы. Возврат в прерванные блоки алгоритмов – ответственная и опасная задача. Она требует продумывания на этапе разработки алгоритма.
Любой реальный алгоритм – это целая система взаимодействующих между собой крупных блоков, решающих каждый свою задачу, но вызывающих другие блоки или прерывающие работу уже действующих по сообщениям о событиях технологического процесса. Сколько сделать таких блоков, и какой размерности будет каждый блок – это искусство алгоритмистов и программистов.
Алгоритмы реализуются в управляющих устройствах, контроллерах, управляющих компьютерах. Роль алгоритма легко оценить на примере посещения Луны. Бортовой управляющий компьютер корабля - ракеты Аполлон 11 (1969 год ) имел 64 КБ памяти и быстродействие в 128 Кбит/сек, но все задачи полета и посадки на Луну были выполнены своевременно и правильно. Конечно, гигантские усилия направлялись на оптимизацию программ, что сейчас делается очень мало и слабо. Но представьте себе, как были продуманы и отшлифованы алгоритмы.
Отсутствие алгоритмов не позволяет предсказывать и управлять. Например, правильный прогноз погоды – только на 4 дня, несмотря на гигантские мощности компьютеров. Вывод - основное значение для управления и регулирования имеют правильные алгоритмы контроля и управления, а не мощность и производительность вычислительной техники. Хороший и правильный алгоритм позволяет качественно решать задачи управления на слабой и плохой технике, лишь бы она была надежной. Алгоритмы составляются до написания программ, и именно здесь закладывается оценка Вашей работы. А создание алгоритма требует изучения и понимания объекта. Обязательно проверяйте Ваши мысли и предположения о работе объекта управления в ходе создания алгоритма на объекте управления. Основное время разработки системы должно уйти именно на эту стадию работы. Только уверенность, подтвержденная опытами на объекте, дает право на составление алгоритмов, а потом на их программирование.
Всегда оформляйте Ваш алгоритм графически или хотя бы таблично. Лучше готовить оба варианта описания алгоритма и проверять их взаимно. Никогда не оставляйте усики – ответвления на блок схеме без указания действия при этой ситуации. Даже самые маловероятные события обязательно произойдут. Если не предусмотрены действия для таких ситуаций, программа остановится и произойдёт авария. В крайнем случае давайте аварийный сигнал и выдавайте информацию оператору процесса.
3 Классические и современные методы управления.

В 1876 году появилась работа, оказавшая большое влияние на науку о регулировании - труд профессора "Об общей теории регуляторов". В этой работе было выведено условие устойчивости для линейных систем третьего порядка и даны конкретные указания о том, как влияют конструктивные параметры на устойчивость. явился основоположником классической теории регулирования. В 1866 году выходит в свет статья Максвелла "О регуляторах". Швейцарский математик А. Гурвиц в 1895 году ввел алгебраические условия устойчивости для линейных систем любого порядка. Долгое время оставалась неизвестной инженерам аналогичная работа Рауса, выполненная им еще в 1877 году по просьбе Максвелла.
Основы общей теории устойчивости динамических систем были заложены выдающимся русским учёным . В своей докторской диссертации в 1892 году им впервые были сформулированы условия устойчивости решений обыкновенных дифференциальных уравнений, дано строгое определение понятия устойчивости, разработаны два основных метода исследования устойчивости: первый метод Ляпунова исследования устойчивости в малом и второй, прямой метод исследования устойчивости в большом.
В те годы, по-видимому, еще никто не подозревал о будущей роли теории в общей теории управления. Лишь в 40-50 годах 20 века его теоремы заработали в полную силу.
В 1932 году американец шведского происхождения Гарри


Активно развивалась использование частотного описания технологических процессов, появились десятки вариаций анализа частотных характеристик. Появились понятия амплитудно-частотных характеристик, фазо-частотных и амплитудно-фазовых характеристик. Строились их годографы (кривые) для визуального определения сколько раз годограф охватывает точку (-1, 0j). Передаточные функции стали основным инструментом работы инженеров автоматчиков. Разрабатывались методы синтеза многомерных и многосвязных систем регулирования на базе передаточных функций. Анализировалась точность и грубость систем управления. Во всех этих разработках объект рассматривался как черный ящик, описываемый только соотношением входных и выходных сигналов. Была выявлена дифференциация систем управление по задачам регулирования по отклонению, по возмущению и смешанного управление. В настоящее время все это рассматривается как классические методы управления.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
