

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
команд (репетование, повторение) из используемого поста управления в рулевую рубку. Стрелки приборов телеграфа непрерывно указывают, фиксируют переданную и принятую команды до передачи новой команды, что является существенным преимуществом судовых телеграфов по сравнению с системами командной телефонной связи. Команда отдается переводом рукоятки любого командного прибора машинного телеграфа КП1, КП2 или КПЗ в рулевой рубке в соответствующее команде положение и передается к исполнительным приборам ИП1 и ИП2 по линии прямой связи: датчик команд ДК-приемники команд П|К1 и ПК2. Приемники команд ПК 1 и ПК2 при этом переходят в заданное датчиком ДК положение, а их стрелки указывают на шкалах переданную к исполнению команду. Появляется несовпадение двух стрелок на каждом приборе телеграфа и рассогласование состояний датчика команд (ДК) и приемника репетованных команд ПО2.
Это рассогласование выявляется устройством включения вызывной сигнализации, УВС, построенный по логической схеме И-НЕ, которое включает вызывные сигнальные приборы телеграфа-трещотки Тщ1-Тщ4, ревун Рв и сигнальную лампу СЛ. Принятая в посту управления-команда репетуется переводом рукоятки исполнительного прибора ИП1 или ИП2 в положение, указанное стрелками приемников команд ПК1 и ПК2, и передается в рулевую рубку по линии обратной связи: датчик репетования команд ДО1 (ДО2)- репетованных команд ПО1, ПО2 и ПОЗ.
Приемники репетованных команд переходят в состояние, соответствующее состоянию датчика команд, устраняется рассогласование датчика ДК и приемника ПО2, вследствие чего устройство УВС отключает вызывную сигнализацию.
Вызывные сигналы машинного телеграфа обязательно должны отличаться от сигналов других систем. Между рукоятками исполнительных приборов машинного телеграфа в рукояткой реверса главного двигателя обязательно имеется блокировка, не показанная на рис.2, предотвращающая грубые ошибки при исполнении правильно принятых и отрепетованных команд. Если отрепетована одна из команд «вперед,» то блокировка не позволит дать ход судну «назад»; если же отрепетована любая из команд «назад», то блокировка не позволит дать ход «вперед».
Машинный телеграф может иметь и 2 переключателя ПТ1 и ПТ2, связанных с рукоятками исполнительных приборов ИП1 и ИП2, как показано на отдельной схеме датчиков Д01 и Д02 на рис.2. При такой схеме датчики Д01 и Д02 отключаются, когда рукоятки приборов ИП1 и ИП2 устанавливаются в специальное крайнее положение. Здесь явное преимущество имеет исполни-тельный прибор телеграфа ИП2 у местного поста управления. Датчик Д02 оказывается включенным при установке рукояток обоих приборов ИП1 и ИП2 в положение «отключено», а если рукоятки обоих приборов ИП1 и ИП2 выведены из положения «отключено», то будет включен только датчик Д02.
Рулевой телеграф (рис. 3) состоит из датчика команд ДК и устройства включения вызывной сигнализации (ВС), расположенных в рулевой рубке, приемника команд ПК и электроакустических сигнальных приборов - звонка Зв или ревуна, расположенных в румпельном отделении, и линий связи между ними. Датчик команд механически связан со специальной рукояткой рулевого телеграфа или со штурвалом рулевой колонки и стрелкой-указателем команд. Шкалы датчика ДК и приемника ПК обычно имеют градуируют в градусах в пределах от + 40 до - 40°.
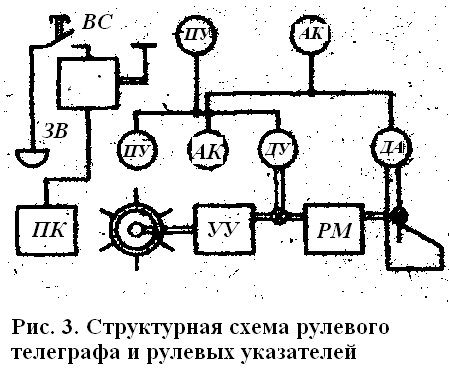
Команды о необходимых перекладках руля задаются перемещением рукоятки и стрелки рулевого телеграфа на соответствующее деление шкалы команд, при котором изменяется состояние датчика ДК. От датчика ДК по линии связи команда передается в приемник ПК, который устанавливает стрелку на деление шкалы команд, соответствующее необходимой перекладке руля. Передача вызова и других условных сигналов из рулевой рубки в румпельное отделение производится при помощи устройства включения сигнализации ВС и электроакустических сигнальных приборов, связанных отдельной линией. Команды рулевого
телеграфа должны исполняться немедленно без репитования, а ход их исполнения контролируется при помощи рулевых указателей.
Рулевые указателя состоят от датчиков ДА и ДУ, механически связанных с баллером руля и штурвалом местного управления рулевой установки, и приемников Ак и ПУ, расположенных в рулевой рубке непосредственно у рулевой колонки и рукоятки рулевого телеграфа. В остальном устройство и принцип работы рулевых указателей аналогичны устройству и работе системы передачи команд рулевого телеграфа. Из рассмотрения структурных схем систем управления судном следует, что важнейшей частью всех судовых телеграфов и указателей являются устройства передачи команд и показаний. В качестве устройств передачи команд на судах преимущественно используются электромеханические системы синхронной связи
2. ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИ СИСТЕМ СИНХРОННОЙ СВЯЗИ [1]
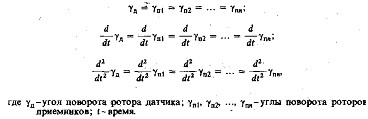
Электромеханической системой синхронной связи называется система, состоящая из датчика, линий связи и приемников, которая обеспечивает перемещение исполнительных органов приемников синфазно и синхронно с перемещением задающего органа датчика. В соответствии с определением основные свойства такой системы связи выражаются следующими соотношениями:
В реальных системах синхронной связи эти соотношения выполняются с определенными погрешностями и ограничениями. Требования к системам синхронной связи предопределяются их назначением и ответственностью судовых телеграфов и указателей как важнейших средств управления судном.
Точность передачи должна отвечать установленным требованиям в зависимости от ее назначения и сохраняться при длительных отклонениях от номинального значения напряжения питания в пределах от 6 до -10% и частоты +5%. Устойчивость синфазности должна сохраняться при кратковременных колебаниях напряжения в пределах от +20 до - 30% (за время <= 1,5 сек) и частоты + 10% (за время =< 5 с) от номинальных значений.
Точность передачи электромеханических систем синхронной связи (ЭМССС) можно повысить путем применения повышающих механических передач при механическом присоединении датчика к объекту (валу).
ЭМССС обладает способностью к самосинхронизации при рассогласовании приемников с датчиком менее одного оборота.
Погрешность передачи рулевого телеграфа и указателей для нулевого положения не должна превышать 1о, при значениях угла от 0 до 5о - не более 1,5о, при значениях угла от 5 до 35о - не более 2,5о. Для машинных телеграфов - не более ј от одного деления шкалы команд.
Анализ ЭМССС с позиции теории автоматического управления показывает, что переходной процесс («разгонная характеристика») при работе приемника с датчиком может носить как апериодический, так и колебательный характер. Для гашения собственных колебаний в систему вводят успокоитеь колебаний (механический демфер).
В системах, чувствительных к выпадению от синхронизма, вводят специальную систему защиты и сигнализацию от этого явления.
В судовых телеграфах и указателях используются системы следящей связи:
- ССС индукционного типа;
- ССС с изменяющейся частоты с питанием от постоянного тока.
2.1. Сельсинные системы синхронной связи (СССС)
В качестве датчиков и приемников такие системы используют однотипные по устройству однофазные, индукционного типа электрические машины - сельсины, питающиеся переменным током стабильной частоты.
Сельсин имеет обмотку возбуждения и три распределенных обмотки синхронизации, смещенные на угол (2/3) π (радиан). Сельсины бывают контактные и бесконтактные. У бесконтактных сельсинов все обмотки расположены на статоре. Специальная конструкция магнитопровода ротора и статора обеспечивают вращение магнитного поля статора на угол и при повороте ротора на этот же угол.
У контактных сельсинов обмотка возбуждения может располагаться на роторе, а обмотки синхронизации на статоре (в этом случае ротор имеет 2 токосъемника), и наоборот (в этом случае ротор имеет 3 токосъемника).
Первичным является напряжение обмоток возбуждения (ОВ), вторичным – напряжения обмоток синхронизации (ОС).
Принцип действия индукционной системы синхронной связи (рис. 2.1)
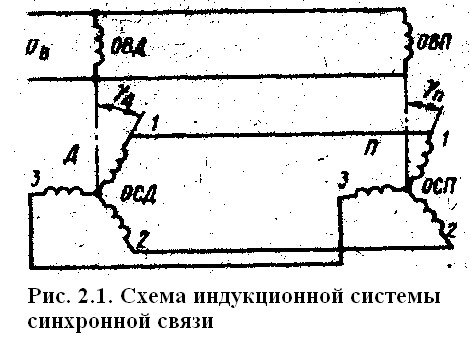
Обмотки возбуждения датчика (ОВД) и приемника (ОВП) подключены к общему источнику переменного тока, который вызывает синфазные изменения магнитных потоков возбуждения датчика и приемника.
В пространственно согласованных положениях вторичных обмоток датчика и приемника будут наводится равные по величине напряжения обмоток и поэтому токи между обмотками датчика и приемника будут равны нулю.
При рассогласовании роторов датчика относительно их статоров наводимые в их обмотках ЭДС не равны попарно между собой и как следствие по линия связи и соответствующим обмоткам синхронизации будут протекать уравновешивающие токи и возникать синхронизирующий момент
M = (3/2 * К2 * U2 L)/ (R2 + щ2 L2),

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
