

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Где L - индуктивность обмотки синхронизации; щ - круговая частота питающего напряжения;
R - суммарное активное сопротивление обмоток синхронизации датчика, приемника и линий связи;
К - конструктивный коэффициент сельсина.
При использовании нескольких сельсинов приемников ток датчика переаспределяется между ними и синхронизирующий момент сельсина датчика будет перераспределяться между ними, т. е.
![]()
![]()
![]()
Где Mmax – максимальный синхронзирующий момент i - сельсина – приемника при его парной работе с к-сельсином - приемником,
иi – угол рассогласования
i- и k- сельсинов.
Вывод: Неисправность в одном из сельсинов – приемников оказывает влияние на работу всей сельсинной системы синхронной связи!
2.2. Потенциометрические системы синхронной связи изменяющейся частоты
В системах синхронной связи изменяющейся частоты частота тока в системе пропорциональна частоте вращения ротора датчика, а фазы токов определяются угловым положением датчика.
Применяются системы синхронной связи изменяющейся частоты в судовых телеграфах и указателях на судах, электрифицированных на постоянном токе, либо на судах, электрифицированных на переменном токе, но не имеющих аварийной электростанции. Потенциометрические ССС не имеют основного недостатка сельсинных ССС - взаимовлияния сельсинов – приемников, которое может вызвать аварию всей системы синхронной связи. В потенциометрических ССС аварии отдельны приемников менее значимы.
Потенциометрические ССС работают на постоянном токе, что важно в случае выхода из строя энергетической установки и переходе на электропитание от аккумуляторной батареи. Линейная зависимость синхронизирующего момента от напряжения питания определяет более высокую их устойчивость к параметрам питающего напряжения.
Приемник такой системы связи представляет собой 3-х фазный синхронный двигатель с обмоткой, расположенной в статоре. Ротор такого двигателя выполненв виде постоянного магнита. Самосинхронизация такого приемника выполняется с точностью до фазы (т. е. щд = щп; цд ≠ цп ).
Датчик системы – это преобразователь постоянного тока в переменный трехфазный, частота которого опеделяется частотой вращения ротора датчика, а фазы токов – геометрическим расположением токосъемных щеток.
Существует большое количество различных видов система синхронной связи изменяющейся частоты. Наиболее общая схема устройства электромеханического датчика потенциометрического типа такой системы связи приведена на рис. 2.2.
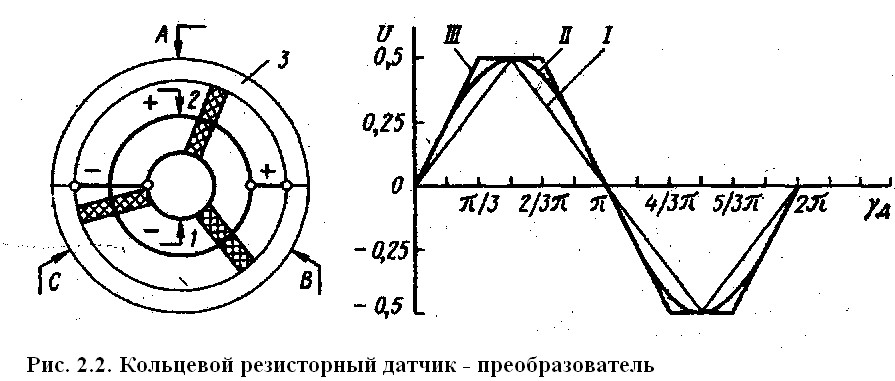
Вращающаяся часть датчика представляет собой кольцевой резистор-3, электрически и механически соединенный с контактными кольцами 1 и 2. К точкам 1 и 2 резистора с помощью щеток подается постоянное напряжение, которое распределяется вдоль кольцевого резистора. Снимаются потенциалы с кольцевого резистора 3 с помощью щеток А, В, С, расположенных под углом 120о. Геометрическое расположение щеток друг от друга обеспечивает сдвиг по фазе между напряжениями Ua, Ub, Uc, равный 120о. Характер изменения напряжения на выходе датчика от угла поворота кольцевого резистора относительно щеток А, В, С зависит от закона распределения сопротивления резистора по его длине (окружности). При равномерном законе распределения эта зависимость имеет пилообразный характер – зависимость 1 (рис. 2.2,б.). При соответствующем выборе закона распределения сопротивления по длине резистора может быть получена результирующая характеристика преобразования, близкая к синусоидальной – III (рис. 2,2, б).
Конструктивно сопротивление выполняют проволочным и применяются такие датчики в ССС повышенной точности.
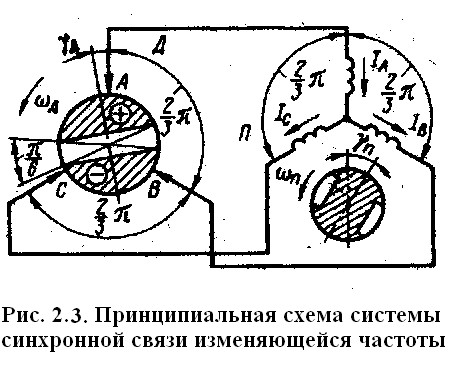
В ССС, где допустима погрешность в пределах 30о, используют вариант датчика с двухпластинчатым коллектором (рис. 2.3). По принципу действия такой датчик является частным случаем резистивного датчика (рис. 2.2), но вместо кольцевого резистора используется двухпластинчатый коллектор, а изоляция между ними составляет π/6 радиан (30о). Пластины коллектора соединены перемычками с контактными кольцами и имеют постоянный потенциал.
Рассмотрим принцип действия такой ССС на примере системы, в которой использован датчик – преобразователь с двухпластинчастым ротором, а приемник – трехфазный двухполюсный синхронный двигатель с ротором в виде постоянного магнита (рис. 2.3).
При повороте такого датчика можно выделить 7 фаз:
![]()
А к +Uпит; В к - Uпит, С=0
![]()
![]()
![]()
![]()
А= - Uпит; В закорочена с С и к +Uпит
![]()
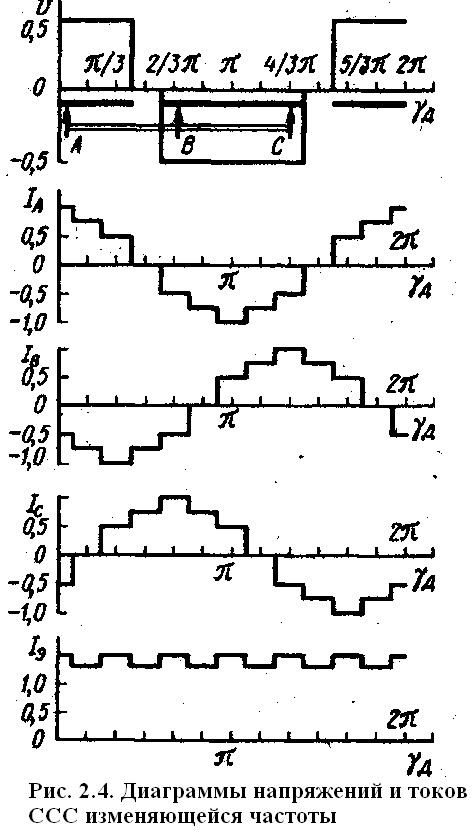
При вращении коллектора потенциалы точек А, В, С будут периодически изменяться (рис. 2.4). (Здесь за нулевой потенциал принята половина питающего напряжения.) При повороте датчика на π/6 радиан одна из щеток датчика будет менять свой потенциал. Это приводит к изменению токов в обмотках приемника также через каждые π/6 радиан поворота датчика.
На диаграмме показаны изменения потенциала щеток датчика и изменение тока в обмотках приемника при вращении коллектора датчика. За один оборот коллектора датчик задает приемнику 12 фиксированных положений, соответствующих углам : 0o, 30o; 60o; 90o; 120o; 150o; 180o; 210o; 240o; 270o; 300o; 330o, которым соответствуют 12 положений ротора приемника. Таким образом такая ССС способна передавать от датчика к приемникам любое из 12 фиксированных положений датчика.
Подобные системы малочувствительны к изменению механической нагрузки приемников, т. к. могут обеспечить значительные токи синхронизирующих обмоток. Практически для такой ССС наиболее опасны короткое замыкание и обрывы линий связи между датчиком и приемником системы.
Сигнально-вызывные устройства (СВУ) телеграфов
Сигнально-вызывное устройство предназначено для выработки сигналов на сигнальное устройство (звонки, трещотки, сигнальные лампы) в случаях, когда имеется угловое рассогласование датчика команд и приемника команд телеграфа.
СВУ бывают двух типов: механические и электрические.
Механические СВУ.
Эта система работает следующим образом:
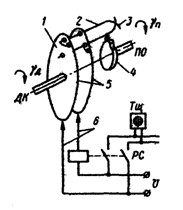
Вал диска 1 механически связан с датчиком команд ДК. Вал диска кулачковой шайбы механически связан с приемником ответа ПО. В том случае, когда углового рассогласования между ДК и ПО нет, то ролик подвижной пружины 3 находится в выточке шайбы 4, при этом контакты пружин 2 и 3 разомкнуты, а, следовательно, цепь питания обмотки реле РС разомкнута.
В случае если ДК и ПО имеют угловое рассогласование, ролик пружины 3 выходит из выточки шайбы 4, при этом контакты пружин 2 и 3 замыкаются, по цепи питания РС протекает ток, в результате чего подается через контакты РС напряжение питания на трещотки, звонки, ревуны и т. д.
Недостатком этой системы является создание ПО дополнительного момента сопротивления, что приводит к появлению зоны нечувствительности в работе системы синхронной связи.
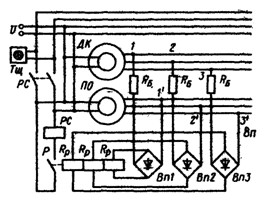
Электрические СВУ
В том случае, когда углового рассогласования между ДК и ПО нет, напряжение на трехфазных обмотках ДК и ПО имеет один и тот же фазовый сдвиг (т. е. фазы совпадают), в результате чего разность мгновенных напряжений между соответствующими фазами обмоток ДК и ПО равна нулю.
В случае углового рассогласования ДК и ПО, возникает фазовый сдвиг между напряжениями соответствующих фаз, в результате между соответствующими фазами ДК и ПО возникает переменное напряжение, амплитуда которого зависит от угла рассогласования. Это напряжение между соответствующими фазами подаётся через балластные резисторы Rб на мостовые выпрямители Вп1-Вп3, выпрямленные напряжения с которых подаются на трехобмоточное реле (Rp), замыкающее контакт Р, который включает реле сигнализации РС.
1. Авторулевые устройства. Режимы работы, структурная схема
Авторулевой обеспечивает движение судна по выбранному направлению. Он выполняется по типовой схеме автоматического регулирования ПИД – регулятора. Авторулевой вырабатывает сигнал управления на устройство управления рулевой машиной в зависимости от отклонения курса судна от заданного, а также сигналы, пропорциональные первой производной по времени от отклонения курса судна от заданного и интегралу по времени от отклонения курса судна от заданного. Дифференциальная составляющая и интегральная составляющая сигнала управления обеспечивают требуемое качество работы системы автоматического управления движением судна:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
