

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Руководитель курса - Александр Кахадзе
Контактная информация телефон - 577-22-61-25
эл. почта - a. *****@***edu. ge
факультет-инженерно –морской
Департамент-электромеханический
Уровень обучения-бакалаврият
Найменование курса - Навигационные системы и судовые коммуникационные сети
судовые коммуникационные сети
л и т е р а т у р а
«Приборы управления и внутрисудовая связь», Москва «Транспорт» 1983
2. Общесудовая связь и сигнализация.
Цикл лекций. МГА –Новороссийск
, Современные системы внутрикорабельной связи. – СПб: Судостроение, 2001. – 256 с.
Введение
Назначение общесудовой связи и сигнализации (ООС и С)
Необходимость в связи между различными командами на судне проявилась давно, видимо, со времен Колумба. Достаточно большие габариты судна, функциональное распределение операций между членами экипажа судна, высокие требования к скорости и надежности исполнения команд потребовали разработки особых технических устройств на судне, которые ранее называли Приборами управления судна, куда и относили устройства внутрисудовой связи.
По мере развития техники и технологий к этой области добавились системы противопожарной сигнализации и пожаротушения, системы видеоконтроля и наблюдения, системы мониторинга за работой отдельных узлов и систем судна. Появились специальные системы - Системы инертных газов на танкерах, Системы автоматического замера и регистрации управления сбросом нефтесодержащих вод танкера, Системы контроля газового состава атмосферы закрытых помещений танкера, Системы управления грузовыми операциями и взрывозащиты танкера.
В последние 10 -15 лет на судах новой постройки стали использовать судовые локальные компьютерные сети контроля и управления работой отдельных систем судна по протоколу CAN. Проявляется тенденция к тому, что все большее число устройств и систем современного судна подключается тем самым к “общесудовой связи и сигнализации”, т. е. на ООСиС постепенно возлагаются функции за контролем состояния и работой отдельных систем судна, обеспечением безопасности мореплавания, исполнением требований международных правил, экологических норм.
В результате бурного развития компьютерной техники, телекоммуникационных сетей связи, спутниковых навигационных и мониторинговых систем можно прогнозировать, что в ближайшем будущем системы общесудовой связи и сигнализации будут использовать в своей работе элементы искусственного интеллекта, позволяющие подсказывать членам экипажа возможные решения в тех или иных экстремальных ситуациях, автоматизировать большинство операций. Практически системы общесудовой связи и сигнализации постепенно могут интегрироваться со всеми другими системами судна в единую автоматизированную информационную систему управления судна.
В настоящее время назначение и состав общесудовых систем связи и сигнализации на судах России регламентируются Правилами классификации и постройки морских судов, разработанными на основе Российского Морского Регистра Судоходства. Согласно Правил классификации и постройки морских судов Внутрисудовая связь и сигнализация включает в себя:
ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ УПРАВЛЕНИЯ СУДНОМ [1]
Современные морские суда оснащаются системами дистанционного автоматизированного управления главными двигателями и рулевыми установками, которые обеспечивают непосредствениое управление движением судна из рулевой рубки. На многих судах в отдельных Помещениях оборудуются центральные посты управления (ЦПУ) энергетических установок, откуда также предусматривается дистанционное управление главными двигателями. Кроме систем дистанционного автоматизированного управления, на всех судах имеются устройства местного управления главными двигателями в машинном отделении и устройства местного управления рулевой установкой в румпельном отделении.
Между рулевой рубкой, центральными местными постами управления главных двигателей, а также между рулевой рубкой и румпельным отделением предусматриваются, как правило, не менее, двух автономных систем командной связи, обеспечивающих управление действиями экипажа на местных постах из рулевой рубки. Для дистанционного контроля частоты и направления вращения гребного вала в рулевой рубке, в центральном и местном постах управления, а иногда и в других помещениях устанавливаются электрические тахометры и указатели направления вращения винта. Для дистанционного контроля перекладки и положения руля в рулевой рубке и в румпельном отделении устанавливаются рулевые указатели - аксиометры. Общая схема системы управления судном показана на рис. 1.
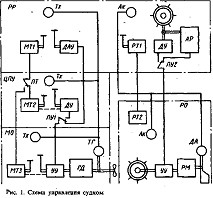
При нормальных условиях эксплуатации судна управление главным двигателем ГД и изменением скорости хода судна производятся дистанционно из рулевой рубки (РР) посредством системы дистанционного автоматизированного управления (ДАУ). Посредством ДАУ из рулевой рубки производятся пуск и остановка главного двигателя, изменяются направление и частота вращения гребного винта, а в установках с винтом регулируемого шага - шаг винта. При отказе или неисправности системы ДАУ управление главным двигателем переводится переключателем ПУ1 на систему дистанционного управления ДУ из центрального поста управления ЦПУ энергетических установок, а команда вахтенного помощника капитана из рулевой рубки передаются в ЦПУ вахтенному механику посредством машинного телеграфа МТ1-МТ2. В случае отказа системы дистанционного управления из ЦПУ управление может осуществляться с местного поста в машинном отделении (МО) непосредственным воздействием на управляющие устройства (УУ) главного двигателя (ГД). При этом переключателем (ПТ)
устанавливают соединение машинного телеграфа МТ1-МТЗ, которым обеспечивается передача команд из рулевой рубки в машинное отделение. Работа главного двигателя контролируется на всех постах управления и на контрольных постах при помощи тахометров (Тх) и указателей направления вращения, подключенных к тахогенератору (ТГ) и датчику направления вращения гребного вала.
Автоматическое управление рулевой установкой и удержание судна на заданном курсе на ходу в открытом море обеспечивается авторулевым (АР) дистанционно. На ходу судна в узкостях и при частых маневрах рулевая машина (РМ) управляется вручную из рулевой рубки при помощи системы дистанционного управления (ДУ) рулем. Основные элементы авторулевого и устройства ручного дистанционного управления рулем устанавливаются, как правило, в корпусе рулевой колонки. Переключение управления рулем с автоматического на ручное, и наоборот, производится переключателем управления ПУ2. Для контроля курса судна в рулевой рубке, румпельном отделении и на других контрольных постах устанавливаются курсоуказатели - репитеры гирокомпаса. На
случай отказа систем дистанционного управления рулем в румпельном отделении РО судна обязательно устанавливается местный пост управления рулевой установки. При этом для передачи команд из рулевой рубки в румпельное отделение о необходимых перекладках руля обязательно предусматривается автономная система прямой телефонной связи или рулевой телеграф РТ1-РТ2. Перекладки и положение руля на всех постах контролируются при помощи рулевых указателей - аксиометров (Ак), подключенных к датчику аксиометров (ДА), который имеет механическую связь с баллером руля.
Машинный телеграф (рис. 2) обычно состоит из одного основного КП2 и двух бортовых командных приборов КП1 и КПЗ, расположенных в рулевой рубке, двух исполнительных приборов ИП1 и ИП2, расположенных в ЦПУ и в машинном отделении МО, переключателя исполнительных приборов телеграфа (ПТ), линий связи и выносных сигнальных устройств - сигнальных ламп, трещоток, звонков и ревунов. В основном командном приборе КП2 установлены датчик команд ДК,
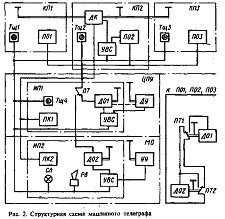
приемник репетованных команд (ответов) ПО2, устройство включения вызывной сигнализации УВС и акустическое сигнальное устройство —трещотка (Тщ2). Рукоятки задания команд всех трех командных приборов обычно механически связаны между собой и с датчиком команд (ДК), поэтому в бортовых приборах КП1 и КПЗ имеются только приемники ответов П01, ПОЗ и трещотки Тщ1, ТщЗ. Оба исполнительных прибора ИП1 и ИП2 одинаковы и состоят из датчика ответов ДО2 и приемника команд ПК1, ПК2. В непосредственной близости от них находятся выносные сигнальные приборы - трещотка (Тщ4), ревун Рв и сигнальные лампы (СЛ). В каждом приборе машинного телеграфа стрелки-указатели приемника и задающей рукоятки имеют общую шкалу команд.
Переключателем исполнительных приборов телеграфа ПТ подключают либо датчик ДО1 исполнительного прибора ИП1 в ЦПУ, либо датчик ДО2 исполнительного прибора ИП2 в машинном отделении, что зависит от используемого поста управления главного двигателя. Машинный телеграф обеспечивает передачу 9 -13 команд из рулевой рубки к постам управления главного двигателя и передачу принятых к исполнению

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
