

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
- минимальное время регулирования
- апериодический либо колебательно-периодический характер переходной характеристики регулирования.
Принцип действия авторулевого
Авторулевой подключается к гирокомпасу или дистанционному магнитному компасу, либо приемнику спутниковой навигационной системы GPS.
В комплект авторулевого "Аист" входит два пульта: ПУ и ПСУ.
ПУ - пульт управления, обеспечивающий три вида работы: автоматический, следящий и простой.
ПСУ - пульт следящего управления, с которого можно задавать два вида работы: следящий и простой.
Кроме этих пультов, на судне может устанавливаться пульт простого управления (ППУ), с помощью которого управление судном производится нажатием клавиш.

На рис. 1 показана блок-схема авторулевого, поясняющая принцип его действия.
В ПУ имеется переключатель S1.1, с помощью которого можно установить один из трех видов управления: автоматический, следящий или простой.
В автоматическом режиме вырабатывается пять сигналов, обеспечивающих удержание судна на заданном курсе. В этом режиме схема авторулевого имеет связь с гирокомпасом, дистанционным магнитным компасом либо системой GPS. Находясь под влиянием внешних возмущений (ветер, волна и т. п.), судно отклоняется от заданного курса. Задача авторулевого заключается в том, чтобы выработать сигнал, передать его на рулевое устройство судна и обеспечить удержание судна на заданном курсе. При уходе судна с курса на угол б сельсин-приемник В2 передает вращение на сельсин-трансформатор В3, на выходе которого формируется основной управляющий сигнал U1= K1*б, пропорциональный углу отклонения судна от курса. Два других управляющих сигнала вырабатываются в блоке коррекции (БК). Эти сигналы образуются на основе сигнала посредством дифференцирования
U2 = К2 * dα и интегрирования (U3 = K3*∫ б*dt).
Сумма сигналов U1+ U2 + U3 подается на вход усилителя. Усиленный суммарный сигнал через переключатель поступает на двигатель М1 исполнительного механизма. Двигатель М1 устанавливает определенное положение золотников рулевой машины (РМ) и обеспечивает перекладку руля на угол в. В зависимости от типа РМ, в комплект авторулевого может входить исполнительный механизм ИМ-1 или ИМ-2. В приборе ИМ-1 выходной валик имеет вращательное движение на некоторый угол е, а в приборе ИМ-2 выходной валик совершает поступательное перемещение на некоторую величину l. Величина е(l) определяет скорость перекладки руля, т. е. е = К* в. С сельсина-трансформатора В5, механически связанного с двигателем М1, снимается сигнал обратной связи U5 = K5*в, который служит для уменьшения автоколебаний пера руля.
Сельсин-трансформатор В6, механически связанный с рулем, вырабатывает сигнал обратной связи U4 = K4*в. Этот сигнал ограничивает угол перекладки руля и вместе с сигналом U1 обеспечивает удержание судна на заданном курсе (по закону незатухающих колебаний).
Для погашения колебаний судна относительно линии заданного курса, т. е. для сдерживания судна, служит сигнал U2 = К2 * dt.
Все пять сигналов суммируются, причем сигналы U1 и U4 всегда в противофазе.
Перекладка руля производится до тех пор, пока двигатель М1 не возвратится в исходное положение.
Для того чтобы задать новый курс в автоматическом режиме, необходимо поворотом штурвала (угол г) передать вращение через механический дифференциал (МД) на подвижный индекс репитера и ротор сельсина-трансформатора В3.
В следящем режиме (положение 2 контактов переключателя S1.1) гирокомпас от схемы авторулевого отключается. Основной сигнал U1 вырабатывается сельсином-трансформатором В3 за счет поворота штурвала вручную на угол г (U1 = K1*г). Сигналы U3 и U3 блоком коррекции не вырабатываются, так как в следящем режиме питание этого блока отключено. Сигналы U4 и U5 формируются так же, как в автоматическом режиме.
В простом режиме сигналы U1…U5 не вырабатываются. Питание на двигатель Ml подается от трансформатора Т1 через кнопки S6, S7 и контакты переключателя S1.6, S1.7. В качестве запасного (аварийного) предусмотрено ручное управление золотниками рулевой машины (при обесточенном двигателе М1). Сельсин-приемник В1 обеспечивает работу репитера курса, а сельсины В7 и В 8 - работу аксиометра.
Системы пожарной сигнализации
Назначение, структура, состав
Системы пожарной сигнализации (СПС) предназначены:
Для сбора информации о состоянии контролируемых помещений. и передача ее на ЦП; Обработки этой информации и выработки решения ЦП. Формирование местных и общесудовых сигналов о пожаре, определения местоположения пожара. Контроль исправности аппаратуры центрального прибора, датчиков, линий связи. Включение средств тушения пожаров (подача воды, углекислоты, пара, отключение вентиляции, закрывание дверей и т. д.).Обобщенная схема систем пожарной сигнализации
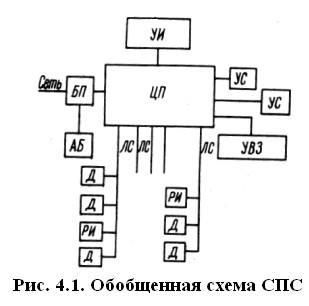
ЦП – центральный прибор;
Д – датчик (извещатель);
РИ – ручной извещатель;
ЛС – линия связи;
УИ – устройство индикации;
УС – устройство сигнализации;
УВЗ – устройство включения средств защиты (вода, пар и т. д.);
БП – блок питания;
АБ – аккумуляторные батареи.
Конструктивно все элементы СПС, кроме датчиков, расположены в рулевой рубке, либо в специально оборудованном пожарном посту. Электрическое питание согласно требования конвенции SOLAS-74 должно быть не менее чем от двух независимых источников. АБ должны обеспечивать работу СПС не менее 72часов. Переключение источников питания должно быть автоматическое с сигнализацией о переключении на резервный источник электропитания. Подключение датчиков к ЦП осуществляется линиями связи, которые могут быть двух-, трех-, и четырех проводными.
Существует 3 способа подключения датчиков к ЦП: радиальный, лучевой и шлейфный.
При радиальном способе на каждую линию связи от центрального прибора подключают по одному датчику (извещателю). Это удобно, так как позволяет указать зону, в которой находится этот датчик в случае его срабатывания. Однако, использоваться он может только на небольших объектах с небольшим числом датчиков. Поэтому на морских судах используется в основном лучевой способ подключения датчиков к ЦП (рис. 4.1.).
В этом случае к линии связи (лучу) подключают несколько датчиков (до 10 - 15), расположенных в различных контролируемых точках одной зоны судна. При срабатывании датчика ЦП указывает зону, в которой находится этот датчик. Для нахождения сработавшего датчика используют два способа:
- визуальный (датчик содержит световой индикатор, который включается при срабатывании датчика),
- кодовый, (в этом случае датчик содержит специальное кодирующее устройство, которое передает по линии связи на ЦП информацию о номере сработавшего датчика).
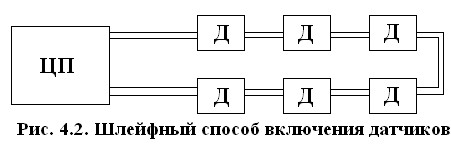
Шлейфный способ подключения датчиков к ЦП используется относительно редко. Он предполагает включение датчиков последовательно в двухпроводную линию шлейфа, которая с обеих сторон подключена к ЦП (рис. 4.2). Достоинство такого способа – его более высокая надежность, так как при разрыве линии шлейфа работа СПС не нарушается. (ЦП обеспечивает контроль каждого датчика с двух сторон шлейфа).
Кроме датчиков СПС имеет ручные извещатели, устанавливаемые в общедоступных местах для подачи команды о пожаре вручную.
Электропитание СПС обеспечивается от судовой сети переменного тока блоком БП. В аварийных случаях при отключениях сети энергопитания БП автоматически осуществляет переключение СПС на резервные аккумуляторные батареи.
Схемы включения датчиков в линии связи СПС
Используется несколько типовых схем включения датчиков и извещателей в линии связи СПС (рис. 4.3).
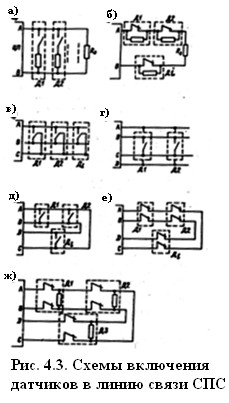
а) – двухпроводный луч с параллельным включением датчиков;
б) – двухпроводный луч с последовательным включением датчиков;
в) – трехпроводный луч, одна линия – сигнальная, вторая – питающая, используют датчики бесконтактного типа;
г) – четырехпроводный луч, используется в дымовых датчиках;
д) – четырехпроводный луч (шлейфная система) с параллельным включением датчиков;
е) – четырехпроводный луч (шлейфная система) с последовательным включением датчиков;
ж) – последовательное включение датчиков с кодирующими резисторами (шлейфная система).
На рис. 4.3 а, б показаны схемы включения датчиков в двухпроводную лучевую линию связи. Для определения номера сработавшего датчика они содержат кодирующие резисторы, т. е. при срабатывании датчика (замыкании контакта, рис. 4.3,а, или размыкании контакта, рис. 4.3,б) в линию связи подключается кодирующий резистор, величина которого определяет номер датчика, к которому он относится. ЦП производит измерение сопротивления луча и по его значению определяет номер сработавшего датчика. В конце луча включен резистор – терминатор, который позволяет проконтролировать целостность линии связи луча с ЦП.
Датчики – извещатели СПС: дымовые, тепловые, датчики пламени
В зависимости от того, на какой физический фактор реагирует датчик, датчики разделяются на следующие группы:
Тепловые; Датчики дыма; Датчики пламени; Комбинированные.Тепловые датчики
Тепловые датчики реагируют на температуру окружающей среды.
Тепловые датчики в зависимости от функционального параметра временной зависимости температуры окружающей среды могут быть:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
