

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Форма тормозной диаграммы измеренная в полигонных условиях приведена pиc. 3.49. Погрешность измерения временных интервалов тормозной диаграммы не должна превышать 0,03с., а установившегося замедления – 14%. При проведении испытаний тормозной системы погрешность измерения силы на органе управления (тормозной педали) не должна превышать 5%. Вместе с тем ГОСТ не запрещает осуществлять допусковый контроль этой силы (не более 50 кГс или не более70 кГс).
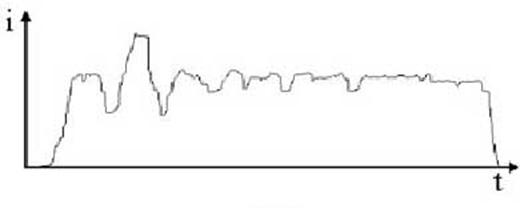
Рис. 3.49. Форма тормозной диаграммы измеренная в полигонных условиях
Вычисленные значения параметров тормозной диаграммы и тормозного пути должны сравниваться с нормативными показателями (численные значения нормативов тормозного пути должны высчитываться в ходе эксперимента в зависимости от того, какой была начальная скорость торможения). Кроме того, следует отметить, что нормативы зависят также и от того, с какой загрузкой испытывается АТС – при снаряженной массе значения нормативных показателей одни, при полной массе – другие. Специфические условия на нормативный показатель “линейное отклонение АТС” (поперечное смещение траектории движения от продольной центральной плоскости автотранспортного средства) задаются в п.1.2.2. ГОСТ требует при проведении испытаний тормозной системы проводить не менее двух измерений.
Параметры оценки эффективности тормозных систем АТС. В соответствии с ГОСТ оценка эффективности тормозных систем АТС при испытаниях в дорожных условиях осуществляется но следующим параметрам:
― тормозной путь (диапазон нормативных значений для различных типов АТС ≤ 1,25...25м;
― установившееся замедление ≥ (4,6...6,8) м/с2 для рабочей тормозной системы и (0,5..,0,8) м/с2 для вспомогательной);
― линейное отклонение АТС (≤ 1,25 … 1,75 м).
Числовые значения перечисленных параметров достаточно просто вычисляются на основе радиолокационной информации с выхода датчика вектора скорости АТС. Кроме того, и результате ее обработки возможно получение и дополнительной информации, которая может представить интерес организациям и предприятиям, эксплуатирующим данный прибор, например:
― асинхронность времени срабатывания тормозного привода колес АТС;
― установившееся замедление АТС в поперечном направлении;
― максимальные значения замедления в продольном и поперечном направлениях;
― временную динамику положения в пространстве продольной оси АТС.
Расчетные аналитические зависимости. Порядок вычислительных действий может быть следующим. Используя массив данных VXГ, VZГ, полученный в результате обработки радиолокационной информации (см. формулы (39)), вычисляются тормозные диаграммы АТС вдоль осей Хг и Zг. Для их определения используется выражение:
jl+1 = [V(i+1) – V(i)]/Δt. (42)
Тормозные диаграммы (кривые 1) в продольном и поперечном направлениях приведены на рис. 3.50 а, б соответственно. Следующим шагом может быть аппроксимация тормозных диаграмм (кривые 2, рис. 3.50 а, б).
В общем случае моменты времени (t1и t1‘), (t2 и t2‘), (t3 и t3‘), (t4 и t4‘) могут не совпадать. Интервал времени Δτ = (t2 – t1) характеризует асинхронность времени срабатывания тормозных механизмов колес АТС.
Интервал времени τн = (t3 – t1) характеризует время нарастания замедления. Интервал времени от t5 до t6 (Δk) соответствует времени непосредственной остановки АТС. Анализ реальных тормозных диаграмм показывает, что даже при наличии неисправных элементов в тормозной системе этот отрезок времени не превышает 0,2 с. Учитывая, что скорость АТС в этот момент времени, практически, нулевая (<<1м/с), погрешность вычисления тормозного пути при экстраполяции хода тормозной диаграммы после прекращения поступления информации с датчика скорости (VАТС![]() 3км/час) и приравнивании Δk нулю не превысит единиц сантиметров. Поэтому есть основания полагать, что t5
3км/час) и приравнивании Δk нулю не превысит единиц сантиметров. Поэтому есть основания полагать, что t5 ![]() t6.
t6.
Из апроксимированных тормозных диаграмм определяем:
― для тормозной диаграммы вдоль оси Xг – jустXг, jмаксXг, t1, t2, t3, t4, tk;
― для тормозной диаграммы вдоль оси Zг – jустZг, jмаксZг, t1‘,t3‘,t4‘.
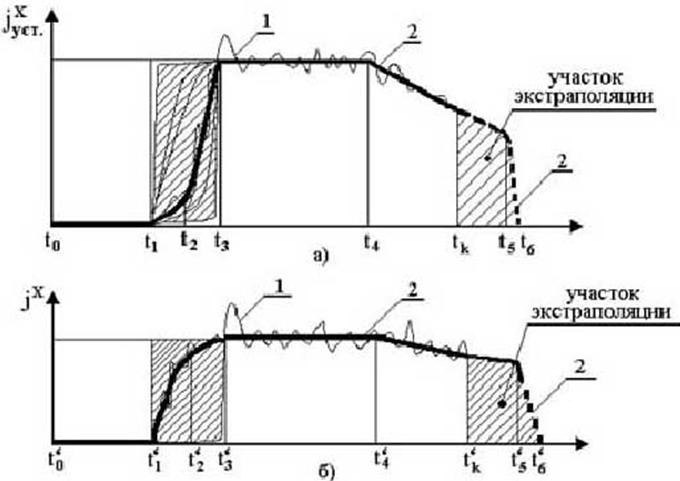
Рис. 3.50. Тормозные диаграммы. По временной оси отмечены: t0 – момент нажатия на тормозную педаль; t1 и t1‘ – время запаздывания тормозной системы (по ГОСТ ); t2 и t2‘– время срабатывания последующего по времени тормозного механизма колес (звеньев автопоезда); t3 и t3‘ - время срабатывания тормозной системы (по ГОСТ ); t4 и t4‘ - момент времени изменения характера замедления во время рабочего интервала торможения t3 … t5; tk - момент времени прекращения поступления информации с датчика скорости; t5 – момент времени окончания рабочего интервала движения; t6 - момент остановки АТС.
Используя эти величины, определяем следующие параметры, характеризующие эффективность рабочей тормозной системы АТС:
― τ = t1, сек – норматив отсутствует;
― τ = t3 – t, сек – норматив отсутствует;
― τср = t3, сек – норматив ГОСТ;
― Δτ = (t2 – t1), сек – норматив для автопоездов см. п. п.1,2,3, ГОСТ;
― jустXГ, м/с2 – норматив ГОСТ;
― jмаксXГ, м/с2 – норматив отсутствует;
― jустZГ, м/с2 – норматив отсутствует;
― jмаксZГ, м/с2 – норматив отсутствует;
― STXГ, м – норматив см. ГОСТ;
― STZГ, м – норматив см. п. 1.2.2. ГОСТ.
При испытаниях вспомогательной тормозной системы определяется только jустXг (норматив см. п.1.2.7. ГОСТ).
В распечатке выходных параметров указываются также условия испытаний: V0, м/с (см. формулу 35); F0, (кГс) (больше или меньше нормативного значения – см. ГОСТ). Величины STXг и STZг определяются из выражений:
STXг= S1 + S2,
STZг = S1‘+ S2‘, (43)
где: S1 – определяется из S1 =  Δt (на интервале t0 … tk); S1‘ – определяется из соотношения:
Δt (на интервале t0 … tk); S1‘ – определяется из соотношения:
|
S1‘ = |
|
Δt (на интервале t0 … tk); |
S2 – определяется из равенства:
S2=VZгk Δt1– jkXг(Δt12/2)+[(j4Xг – jkXг)/ Δt2]( Δt13/3) (на интервале tk…t6);
S2‘– определяется из уравнения:
S2‘=VXгi Δt1‘– jkZг(Δt12/2)+[(j4Zг – jkZг)/ Δt2]( Δt13/3) (на интервале tk...t6).
Зависимости S2(S2‘ ) получены из
|
S2 = |
|
(44) |
S2 = (44)
т. к. t6![]() t5, а j(t)
t5, а j(t) ![]() jk – nt = jk – [(j4 – jk)/(jk – j4)]t.
jk – nt = jk – [(j4 – jk)/(jk – j4)]t.
Обозначив Δt1= t5 – tk, Δt2 tk – t4 и проинтегрировав (4.3), получим:
S2 = Vk Δt1 – jk(Δt12/2) + [(j4 – jk)/ Δt2] (Δt13/
Величина Δt1 определяется из условия:
Vk – (jk – n Δt1) Δt1 ![]() 0. (46)
0. (46)
Из (46), решив квадратное уравнение, получим:
|
Δt1 = [(jk – |
|
)] /2n. |
(47) |
Знак перед радикалом выбирается исходя из физических (чтобы Δt > 0) соображений. При n = 0, что соответствует отсутствию перегиба на вершине тормозной диаграммы, (46) превращается в Vk – jk Δt1 = 0, откуда:
Δt1 = Vk/jk, (48)
а S2 вычисляется но формуле:
S2 = Vk Δt1 – jуст(Δt12/
Представляет интерес сравнить вычисленную величину с аналогичной, определяемой по задаваемому ГОСТом выражению:
STXгГОСТ = (V0/3,6)(τc + 0,5τн) + V0/26 jуст. (50)
При проведении нескольких измерений во время испытаний АТС получаемые данные, характеризующие эффективность действия тормозной системы, должны усредняться.
Перечень нормативных параметров для хранения в ПЗУ ЭВМ. В постоянном запоминающем устройстве ЭВМ должны храниться по категориям АТС и по году выпуска (до 01.01.81 г. или после) следующие нормативные показатели:
― STп. м. – тормозной путь для АТС полной массы;
― STс. с. – тормозной путь для АТС в снаряженном состоянии;
― jуст – установившееся замедление;
― τcр. – время срабатывания тормозной системы;
― STZг – линейное отклонение АТС и зависимости от его длины и ширины;
― Δt – асинхронность времени срабатывания тормозного привода звеньев автопоезда;
― jуст. в..т..с. п. м. – установившееся замедление при испытаниях вспомогательной тормозной системы для АТС полной массы;
― jуст. в..т. с.с. с. – установившееся замедление при испытаниях вспомогательной тормозной системы для АТС в снаряженном состоянии.
Значения нормативных показателей берутся из ГОСТ .
Кроме того в ПЗУ должны быть занесены:
― классификация транспортных средств (Приложение 2 к ГОСТ);
― формула пересчета нормативов тормозного пути для различной начальной скорости торможения АТС (Приложение 4);
― А и j – пересчетные коэффициенты (ГОСТ) для всех категорий АТС полной массы и снаряженном состоянии, а также по году выпуска (до и после 0.1.01.81г.).
Выводы. Рассмотренный прибор и способ обработки радиолокационных сигналов обеспечивает:
― измерение начальной скорости при торможении;
― допусковый контроль усилия на органе управления тормозной системы;
― время срабатывания тормозов;
― тормозной путь в продольном направлении, установившееся замедление в продольном направлении;
― поперечное смещение АТС от прямолинейной траектории (занос).
Прибор представляет собой малогабаритный трехлучевой автодинный радиолокатор сверхмалой мощности и состоит из трех основных узлов:
― выносной приемопередающий моноблок (датчик скорости);
― датчик давления на тормозную педаль (на основе тензомоста);
― вычислительное устройство, которое производит обработку радиолокационной информации, визуализацию и документирование результатов измерений и испытаний[31].
Радиолокационный выносной моноблок выполнен на автодинных приемопередающих модулях сопряженных с рупорными осесимметричными антеннами с углами наклона каждой к подстилающей поверхности 600 и углом отворота второй антенны от плоскости, проходящей через первую и третью антенны, равным 350. Диаметр апертур антенн 50 мм, в их раскрыве герметично установлены диэлектрические линзы, формирующие фазовый фронт зондирующих сигналов. Резонансная система автодинов[32] выполнена на отрезках круглого волновода, в качестве активных элементов использованы высокоэффективные диоды Ганна “Охра” (АА768, АДБК 432130.343ТУ) с малым потребленим мощности по цепи питания[33]. Рабочая частота фиксированная в диапазоне 42,3 ГГц 2,5% в соответствии с Приложением 1 ГОСТ , стр.13.
Устройство обеспечивает повышенную точность контроля кинетических и динамических характеристик АТС, снижает временные затраты при контроле тормозной системы автомобиля за счет учета положения антенной системы относительно подстилающей поверхности непосредственно в процессе проведения измерений. Данное устройство может быть использовано при разработке транспортных тахографов для контроля графика движения транспортных средств, при этом контроль параметров движения может осуществляться как в пути следования, так и после его окончания.
Глава 4. Радионавигация
4.1. Задачи радионавигации
Одним из наиболее заметных и практически важных научно-технических достижений последнего двадцатилетия XX в. стало создание спутниковых радионавигационных систем (СРНС) второго поколения ГЛОНАСС (РФ) и GPS (США). Введенные в эксплуатацию в начале 90-х годов, эти системы первоначально предназначались для решения задач точного местоопределения высокодинамичных объектов военного назначения. Однако полученный в процессе испытаний и эксплуатации СРНС опыт показал, что создаваемое этими системами глобальное навигационно-временное поле позволяет обеспечивать не только высокоточную навигацию подвижных средств, но и решать на принципиально новой основе широкий круг других прикладных задач, которые при проектировании СРНС не рассматривались. Как следствие, возникли и быстро развиваются многочисленные приложения спутниковой радионавигации в различных сферах: от геофизических исследований до автоматического управления карьерными механизмами и автотранспортом.
В настоящее время более 200 фирм во всем мире выпускают сотни тысяч экземпляров аппаратуры потребителей (АП) СРНС различных классов, в том числе недорогие малогабаритные приборы для индивидуальных пользователей. В результате АП СРНС, наряду со средствами мобильной связи и другими новейшими достижениями радиоэлектроники, стала не только средством сугубо профессиональной деятельности, но и предметом личного пользования, что многократно расширяет круг ее потребителей.
В данном разделе рассмотрим основные особенности построения и функционирования СРНС второго поколения, а также реализованные на их основе информационные технологии.
Термин «навигация» (от лат. navigo - плыву на судне), появившийся в русском языке в петровскую эпоху, первоначально относился к морскому судовождению. В настоящее время этот термин охватывает широкий круг приложений, связанных с местоопределением различных объектов и обеспечением их движения по заданным траекториям. Близкие как по замыслу, так и по методам решения задачи возникают при топогеодезической привязке неподвижных объектов.
Источниками информации при решении навигационных задач могут быть различные факторы и явления естественного и искусственного происхождения: астрономические данные, параметры и законы изменения магнитного, гравитационного и электромагнитного полей, инерциальные явления в движущихся массах и т. п. Системы, не использующие для решения навигационных задач искусственные поля и данные, созданные внешними (не бортовыми) источниками, относятся к классу автономных, в противном случае система называется неавтономной. Радионавигационными в настоящее время принято называть системы, в которых для решения задачи место-определения используются радиосигналы внешнего искусственного источника с известными координатами. Таким образом, радионавигационные системы относятся к классу неавтономных.
4.2. Эволюция радионавигационных систем
Принципиальная возможность использования для целей навигации радиосигналов стала очевидной практически одновременно с первыми удачными опытами по радиосвязи. Первые нашедшие практическое применение радионавигационные системы использовали принцип пеленгации источника радиоизлучения (радиомаяка) с помощью направленных антенн. Вначале пеленгация осуществлялась по максимуму диаграммы направленности простейших рамочных антенн, затем стали применять многоэлементные или сканирующие антенны, позволявшие реализовать более точный метод равносигнальной зоны.
Радиопеленгаторные системы получили широкое применение для судовождения, а затем и в аэронавигации. В настоящее время в мире используются десятки тысяч судовых и аэронавигационных радиомаяков, в том числе с активным ответом, позволяющих определить не только направление на маяк, но и дальность до него.
Ограничения, присущие радиомаячным системам, использующим амплитудные методы пеленгации, обусловлены тем обстоятельством, что погрешность местоопределения в них быстро возрастает с увеличением расстояния до источника сигнала. Действительно, даже при допущении, что угловая погрешность пеленгации источника не зависит от дальности до него, соответствующая линейная погрешность возрастает пропорционально расстоянию. На практике угловая погрешность также возрастает вследствие уменьшения мощности сигнала, которая падает пропорционально квадрату дальности. В итоге при расстояниях порядка сотен километров и более точность амплитудного метода оказывается неприемлемо низкой.
Поэтому в 30-е годы XX в. были начаты разработки радионавигационных систем (РНС), использующих фазовые (радиоинтерферометрические) методы пеленгации. Аппаратура, реализующая предложенный и запатентованный указанными авторами «способ определения расстояния между двумя пунктами при помощи электромагнитных волн», основанный на измерении в точке наблюдения разности фаз сигналов, принимаемых от двух источников, нашла практическое применение. Так, в Великобритании была создана система Декка, обеспечивавшая судовождение при удалении от берега до 500 км. В частности, система Декка использовалась для управления кораблями и судами, участвовавшими в боевой операции по высадке десанта союзных войск в Нормандии.
Однако в полном смысле массовое применение РНС началось в период Второй мировой войны с созданием в США разностно-дальномерной системы Лоран-А. Сходная по принципу действия система Консол была в этот же период создана в Германии, однако после завершения войны ее функционирование и дальнейшее развитие были прекращены.
Принцип действия РНС Лоран-А состоит в измерении в точке приема разности времени прихода импульсных радиосигналов, моменты излучения которых двумя или более передающими станциями синхронизированы. Линией положения (геометрическим местом точек на поверхности Земли, для которых разность времени прихода пары сигналов постоянна) является гипербола, в фокусах которой расположены передающие станции, поэтому РНС данного класса иногда называют гиперболическими. Поскольку координаты передающих станций известны потребителю, для определения своего местоположения он должен, вычислив разность времени прихода сигнала от двух пар передающих станций, найти точку пересечения соответствующих двух гипербол.
Цепочка станций Лоран-А состояла из трех передающих станций: ведущей и двух ведомых. Принцип синхронизации системы предусматривал, что ведомые станции излучали сигналы в момент поступления на них импульса ведущей станции. Таким образом, устранялась неоднозначность измерений, связанная с тем, что в общем случае гиперболы могут иметь несколько точек пересечения. Станции располагались на расстоянии в несколько сот километров и использовали пять фиксированных частотных каналов в диапазоне средних волн 154м. Дальность действия системы Лоран-А в зависимости от времени суток составляла 1000...2500 км, а погрешность местоопределения была 1...10 км. Для повышения точности использовался метод, основанный на приеме сигналов более чем двух пар станций и выборе гипербол, пересекающихся под углом, близким к прямому.
Дальнейшим развитием данного направления РНС явилась система Лоран-С. Ее основное отличие от системы Лоран-А состоит в том, что для измерения разности времени прихода сигналов в ней используется не только огибающая принятого импульсного сигнала, но и фаза колебаний его несущей частоты (100 кГц). Учет фазовой информации позволил уменьшить погрешность местоопределения примерно до 100 м. Дальность действия Лоран-С при высоте подъема антенн около 200 м достигает 4000 км. До появления спутниковой радионавигации система Лоран являлась наиболее массовым средством радионавигации, и до настоящего времени приемоиндикаторы этой системы входят в штатный комплект навигационного оборудования большинства надводных и воздушных судов. В СССР была создана существующая до настоящего времени гиперболическая система навигации Чайка, аналогичная Лоран-С.
Наряду с импульсно-дальномерными системами в послевоенные годы продолжали развиваться фазовые радионавигационные системы: уже упоминавшаяся выше Декка и разработанная в конце 60-х годов XX в. глобальная система Омега. Особенность последней состояла в том, что синхронизация всех передающих станций осуществлялась от единого эталона всемирного времени, а это обеспечило независимость их работы и повысило точность фазовых измерений. В состав системы Омега вошли восемь станций, расположенных в США, Японии, Норвегии, Аргентине, Либерии, на Гавайских островах и о. Реюньон. Высота мачт антенных систем этих станций составляет 350...400 м, что обеспечило дальность действия системы до 10 тыс. км. В это же время для обеспечения судовождения в арктических районах в СССР была введена в строй фазовая радионавигационная система высокой точности (РСВТ) с дальностью действия в пределах 1000 км, а также система дальнего действия РСДН-20 (Маршрут), работающая в сверхдлинноволновом диапазоне.
Принципы навигационных измерений, статистические методы обработки сигналов и другие технические решения, разработанные применительно к РНС наземного базирования явились научно-техническим фундаментом для проектирования спутниковых радионавигационных систем, в которых носителем источника навигационного сигнала является искусственный спутник Земли, навигационный космический аппарат (НКА). Возможность использования в качестве источника навигационного сигнала объекта, движущегося со скоростью порядка нескольких километров в секунду, базируется на том, что орбита НКА и параметры его движения могут прогнозироваться и контролироваться с весьма высокой точностью, т. е. известны в любой момент времени.
Первые работы в области навигационного использования ИСЗ были опубликованы в 1957 г., одновременно с запуском первого ИСЗ. В 19гг. были проведены работы, определившие технический облик первого поколения СРНС, который был реализован в советской низкоорбитальной системе Цикада. Сходные решения были использованы в американской низкоорбитальной СРНС Транзит.
Система Цикада включала в себя 4 НКА, система Транзит - 6 НКА, высота орбиты НКА этих систем составляла около 1000 км, период обращения - около 100 мин. При таких параметрах зона радиовидимости НКА для наземного потребителя имеет радиус порядка 2000 км, а время пребывания НКА в этой зоне - 5мин, перерыв между сеансами наблюдения отдельных спутников лежит в пределах от 35 мин (в приполярных зонах) до 90 мин (вблизи экватора). В этих системах использовался интегральный доплеровский метод навигационных определений.
Успешный опыт эксплуатации СРНС Транзит и Цикада подтвердил перспективность спутниковой радионавигации как основной линии развития радионавигации в целом. В то же время стали очевидными принципиальные недостатки СРНС первого поколения:
― наличие перерывов между сеансами наблюдения НКА исключало возможность местоопределения в произвольный момент времени или непрерывного местоопределения в течение длительного интервала времени. Уменьшить интервал между сеансами, увеличив количество НКА, было нельзя, поскольку все НКА использовали идентичные сигналы и при их одновременном наблюдении возникали взаимные помехи;
― при интегральном доплеровском методе местоопределения необходимо результаты измерений, соответствующие различным моментам времени, приводить к одному моменту. Технические средства, существовавшие на момент создания СРНС первого поколения, обеспечивали точность синхронизации бортового эталона времени НКА и опорного генератора аппаратуры потребителя, соответствующую погрешности местоопределения неподвижного объекта порядка 50 м (СКО). Для движущихся объектов точность интегрального доплеровского метода измерений существенно зависит от точности определения собственной скорости движения потребителя. Так, погрешность измерения собственной скорости, равная 0,5 м/с, приводит к погрешности местоопределения порядка 500 м, т. е. по сравнению с неподвижным потребителем погрешность возрастает примерно в 10 раз.
Таким образом, СРНС первого поколения не удовлетворяли требованиям непрерывного высокоточного местоопределения динамичных объектов в любой точке Земли с выдачей результатов измерений в реальном масштабе времени. Рассматривавшиеся на определенном этапе варианты расширения возможностей этих систем за счет увеличения числа спутников при одновременном увеличении высоты орбиты, а также за счет добавления к доплеровскому каналу дальномерного канала не обеспечивали радикального улучшения ситуации, поскольку перспективная СРНС должна предоставлять потребителю возможность в любой момент времени определить три координаты, вектор скорости и точное время. Для реализации такой возможности необходимо проводить измерения не менее чем по четырем спутникам, что накладывает соответствующее условие на структуру орбитальной группировки НКА: в любой момент времени в любой точке земной поверхности должна быть обеспечена возможность наблюдения не менее четырех НКА, при этом общее число НКА в группировке должно быть минимальным.
Для решения поставленной задачи при проектировании СРНС второго поколения были избраны среднеорбитальные НКА с высотой орбиты порядка 20 тыс. км (дальнейшее увеличение высоты орбиты нецелесообразно, так как не приводит к расширению зоны видимости НКА). Период обращения НКА при такой высоте орбиты равен примерно 12 ч. В этом случае, для того, чтобы гарантировать в любой точке Земли одновременное наблюдение не менее 4 НКА, в составе орбитальной группировки должно быть не менее 18 НКА, однако для повышения точности и надежности навигационных измерений было решено увеличить это число до 24. Кроме изменения структуры и геометрии орбитальной группировки, в СРНС второго поколения с самого начала были заложены средства, обеспечивающие прецизионную (с точностью до единиц наносекунд) взаимную синхронизацию бортовых шкал (эталонов) времени НКА. Большое внимание было уделено также развитию средств высокоточного определения и прогнозирования параметров орбит (эфемерид) НКА. Достаточно сказать, что для достижения требуемой точности прогноза эфемерид должны учитываться такие факторы, как световое давление на НКА, влияние релятивистских эффектов на гравитационное поле Земли, неравномерность вращения Земли и ее полюсов, а также наличие реактивных сил, связанных с газоотделением материалов покрытия НКА. Решение перечисленных, а также и многих других второстепенных задач позволило создать, ввести в эксплуатацию и предоставить в пользование всему населению Земли две среднеорбитальные СРНС второго поколения:
― российская система ГЛОНАСС (Глобальная навигационная спутниковая система);
― американская система NAVSTAR (Navigation Satellite Time and Ranging), в настоящее время именуемая также GPS (Global Positioning System).
4.3.Спутниковые радионавигационные системы
Обобщенная структурная схема СРНС
Принципиальная особенность СРНС, состоящая в том, что роль опорных точек в них играют НКА, совершающие орбитальное движение, определяет необходимость изменения структуры СРНС по сравнению с РНС наземного базирования. В отличие от последних, содержащих в качестве основных звеньев только аппаратуру базовых станций и АП, в составе СРНС необходима подсистема, обеспечивающая:
― контроль траекторий движения НКА;
― дистанционный мониторинг исправности бортовой аппаратуры и точности бортовых эталонов времени;
― управление режимами работы бортовой аппаратуры, составом, объемом и скоростью передачи служебной информации и пр.
Поэтому структура СРНС содержит три основные подсистемы:
1) подсистему (орбитальную группировку) РЖА;
2) подсистему контроля и управления (контрольно-измерительный комплекс, КИК);
3) подсистему аппаратуры потребителей.
Кроме указанных подсистем в структуру СРНС входят так называемые средства функциональных дополнений, т. е. специальная наземная аппаратура, используемая для обеспечения потребителям в определенном регионе или локальной области дополнительных возможностей, например повышения точности измерений за счет использования дифференциальных методов измерений.
Подсистема НКА
Основное назначение НКА - формирование и излучение жестко синхронизированных сигналов, которые используются потребителями для навигационных определений, а назначение КИК - контроль функционирования бортовых систем и организация управления их работой. Соответственно, в состав бортовой аппаратуры входят передатчики и антенны навигационных сигналов и телеметрической информации, антенны и приемники данных и команд, передаваемых от КИК, бортовой эталон времени и частоты, блоки ориентирования, источники питания и различное вспомогательное оборудование.
Сигналы, излучаемые НКА обеих рассматриваемых СРНС, лежат в коротковолновой части дециметрового диапазона волн. При этом с целью уменьшения погрешностей в измерениях, возникающих при распространении сигналов от НКА через ионосферу, в СРНС ГЛОНАСС и GPS организовано излучение навигационных сигналов в двух полосах частот: 1,25 и 1,6 ГГц. Минимальный (для окологоризонтных спутников) энергетический потенциал сигналов, излучаемых НКА, составляет -160 дБ/Вт, что позволяет использовать в АП слабонаправленные антенны и умеренно сложные приемники. В обеих СРНС сигналы НКА имеют правую круговую поляризацию.
Навигационные сигналы НКА модулируются по фазе двумя видами псевдослучайных последовательностей (ПСП):
1) широкополосной (длительность символа 0,1 или 1 мкс), используемой в АП для дальномерных измерений;
2) узкополосной (длительность символа 20 мс), предназначенной для передачи потребителям навигационного сообщения (НС), т. е. массива навигационной и служебной информации, включающей в себя координаты НКА и их производные (эфемеридная информация), частотно-временные поправки для бортового эталона времени и частоты данного НКА, прогноз погрешностей, связанных с условиями распространения радиоволн, данные об исправности аппаратуры и т. п.
Структура и параметры орбитальной группировки НКА выбраны так, чтобы была обеспечена заданная кратность глобального покрытия поверхности Земли зонами видимости НКА, т. е. возможность круглосуточного наблюдения в любой точке Земли числа РЖА, необходимого для навигационных измерений (для используемых в СРНС ГЛОНАСС и GPS псевдо-дальномерных методов измерений минимально необходимое число НКА равно четырем). Кроме того, учитывались соображения, связанные с геометрическим фактором точности, минимизацией интерференции сигналов от разных НКА в точке приема, и ряд других.
Структура орбитальной группировки ГЛОНАСС
Полная орбитальная группировка[34] в российской среднеорбитальной СРНС второго поколения ГЛОНАСС содержит 24 штатных НКА, размещенных на трех круговых орбитах по восемь НКА в каждой.
Наклонение орбитальных плоскостей составляет 64,8°, долготы восходящих узлов (точек пересечения экваториальной плоскости с орбитой, при движении НКА с юга на север) различаются на 120°. В каждой орбитальной плоскости восемь НКА разнесены по аргументу широты на 45°, а аргументы широты НКА в каждой орбитальной плоскости сдвинуты относительно соседней на ±15°. Высоте круговых орбит, равнойкм над поверхностью Земли, соответствует номинальный период обращения НКА Т = 11 ч 15 мин 44 с, не кратный периоду суточного вращения Земли. Орбиты с таким периодом, называемые несинхронными, менее чувствительны к возмущениям, обусловленным неоднородностью гравитационного поля Земли, по сравнению с синхронными круговыми орбитами (T= 12 ч 00 мин), используемыми в системе GPS. Действительно, след синхронной орбиты НКА на поверхности Земли раз в сутки проходит через одни и те же точки, поэтому картина возмущения орбиты неоднородностями гравитационного поля будет повторяться для каждого НКА, при этом заметно отличаясь от картины возмущений для всех других НКА. След же несинхронной круговой орбиты, благодаря вращению Земли, медленно (с периодом 8 суток) перемещается относительно поверхности Земли, при этом возмущения орбит для всех НКА в среднем будут практически одинаковы.
Полномасштабные летные испытания СРНС ГЛОНАСС начались в 1982 г. запуском спутника «Космос-1413». Первоначально разрабатывавшаяся как система военного назначения, СРНС ГЛОНАСС в 1999 г. получила статус системы двойного (военного и гражданского) применения, ответственными за использование, поддержание и развитие которой являются Министерство обороны РФ и Российское авиационно-космическое агентство. Соответствующими постановлениями Правительства РФ от 1995 и 1999 гг. определено, что СРНС ГЛОНАСС в стандартном режиме можно бесплатно использовать в гражданских, коммерческих и научных целях любыми потребителями. Основным документом, устанавливающим[35] взаимоотношения потребителей с системой, является Интерфейсный контрольный документ ГЛОНАСС. Развертывание орбитальной группировки до полного состава - 24 НКА - завершилось в 1995 г., однако по причине выработки ресурса НКА на начало 2004 г. действующий состав орбитальной группировки ГЛОНАСС составлял 10 НКА. В ближайшие годы планируется произвести запуск необходимого количества НКА и таким образом полностью восстановить и в дальнейшем поддерживать работоспособность системы.
Согласно разработанной программе модернизации СРНС ГЛОНАСС для восполнения орбитальной группировки будут применяться модернизированные НКА (ГЛОНАСС-М), основные отличия которых от НКА первой модификации состоят[36] в следующем:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 |
