

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
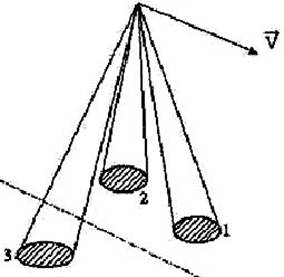
Рис.3.39. Пример расположения лучей антенны и отражающих участков подстилающей поверхности
Для решения задачи необходимо знание составляющих вектора скорости в горизонтальной системе координат. Предполагается, что начало обеих систем координат совпадает с центром масс движущегося объекта, а ось Хг совпадает с проекцией его продольной оси на горизонтальную плоскость.
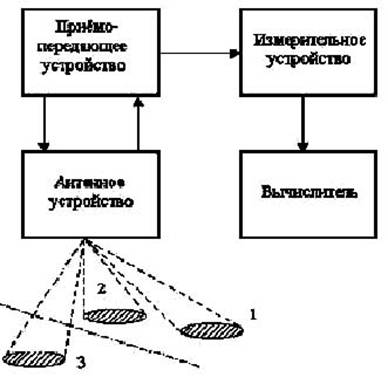
Рис.3.40. Функциональная схема доплеровского измерителя вектора скорости
Допустим, что трехлучевая антенна доплеровского измерителя (см. рис.3.39) неподвижна но отношению к корпусу объекта. В этом случае антенная система координат ХАYАZА совпадает (с точностью до установки) с системой координат XiYiZi, жестко связанной с объектом и называемой связанной системой координат. Составляющие вектора скорости в этой системе координат связаны со средними доплеровскими частотами сигналов, принимаемых по трем лучам антенны, следующими соотношениями:
VX1= [(FД1 – FД2) λ] / (4cosB0 соsГ0),
VY1 = – [(FД1 + FД3 )λ] /(4sinB0),
VY1 = [(FД 3 – АД 2)λ] / (4соsВ0 sinГ0),
где B0, Г0 – углы, характеризующие положение осей лучей антенны в системе координат XiYiZi. Зная составляющие вектора скорости в связанной системе координат, можно вычислить составляющие этого вектора в горизонтальной системе координат, воспользовавшись известными соотношениями преобразования систем координат.
Функциональная схема доплеровского измерителя представлена на рис. 3.40. В состав измерителя входят:
― антенное устройство, формирующее необходимое количество лучей;
― приемо-передающее устройство, связанное с антенным устройством либо непосредственно, либо через волноводный коммутатор лучей;
― измерительное устройство, преобразующее сигналы с доплеровскими частотами в аналоговые величины либо в последовательности импульсов;
― вычислительное устройство, преобразующее эти данные в значения составляющих вектора скорости, определяющее модуль вектора скорости и угловые величины, характеризующие направление вектора скорости в пространстве.
Принцип работы доплеровского измерителя скорости заключается в следующем. Допустим, что антенна формирует в пространстве три луча (см. рис. 3.39), в пределах которых идут излучение и прием непрерывных радиочастотных колебаний.
Когда угол сноса равен нулю и проекция продольной оси движущегося объекта на земную поверхность совпадает с линией пути, антенна измерителя с одинаковой скоростью удаляется от площадок местности, освещаемых правым – 3 и левым – 2 лучами. Поэтому средние доплеровские частоты сигналов этих лучей равны между собой. При наличии угла сноса (см. рис. 3.41) лучи антенны расположены несимметрично относительно линий пути.
Скорости удаления антенны измерителя от площадок местности неодинаковы и, следовательно, средние доплеровские частоты сигналов левого и правого лучей не равны между собой:
FД2 = – (2V / λ) cosB0 соs (Г0 – β),
FД3 = – (2V / λ) cosB0cos (Г0 + β).
Отсюда видно, что чем больше угол сноса транспортного средства, тем больше доплеровские частоты сигналов FД2 и FД3 отличаются друг от друга. Разность этих частот является мерой угла β.
Средняя доплеровская частота сигнала, принятого по лучу 1 определяется выражением:
FД1 = (2V / λ) cosB0соs (Г0 +β).
Разность средних доплеровских частот сигналов, принятых по лучам 1 и 2 является мерой модуля скорости движущегося объекта.
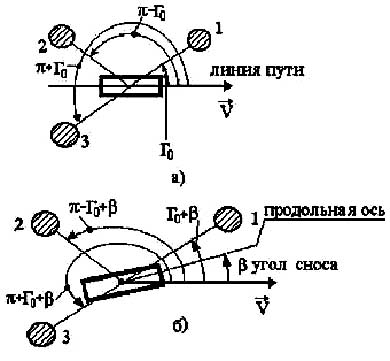
Рис. 3.41. Расположение лучей антенны и пути
Измерив частоты FД1, FД2, FД3 и передав информацию о них в вычислительное устройство, можно определить составляющие вектора скорости в нужной системе координат, а также модуль V и угол β:
tgβ = VZ1/VX1= (FДЗ – FД2) / (FД1 – FД2) ctgГ0,
V = VХ1 /соsβ = [(FД1-FД2) λ] / (4соs В0 соsГ0cosβ).
Определение вектора скорости автотранспортного
средства по доплеровским частотам
Общие соотношения. Доплеровское изменение частоты FДi позволяет определить прямоугольную проекцию Vi вектора скорости V на направление радиолуча:
Vi = FДi λ/2, (7)
где – λ длина волны излучаемых колебаний
Прямоугольная проекция вектора V на направление бесконечно узкого луча, характеризующееся ортом Ii, может быть представлена скалярным произведением векторов V и Ii (рис.3.42):
V1 = (VIi). (8)

Рис.3.42. Расположение i-го луча датчика вектора скорости в автомобильной системе координат.
На рис. 3.42 представлено расположение i-го луча датчика вектора скорости в автомобильной системе координат.
Так как в общем случае положение вектора V в пространстве определяется тремя проекциями, то необходимо иметь три линейно независимых уравнения вида (2), Т. е. три доплеровских частоты.
Условие независимости трех скалярных произведений (2) может быть записано в следующей форме:
Δ=(Ī1Ī2Ī3)≠0, (9)
т. е. лучи измерителя не должны лежать в одной плоскости.
При условии (2.3) вектор скорости V определяется следующим образом:
V = [1/ (I1I2I3)] {V1[I2I3] + V2[I3I1] + V3[I1I2]}, (10)
где [Ii Ik] - векторные произведения соответствующей пары векторов.
Положение вектора V в прямоугольной системе координат X1Y1Z1, связанной с АТС характеризуется тремя проекциями VX1VY2VZ3:
VX 1 = (Vi) = B11V1+ B12V2+ В13V3
VY 1 = (Vj) = B21V1+ B22V2 + B23V3
VZ 1 = (Vk) = B31V1+ B32V1+ В33V3, (11)
где i1,j1,k1 – орты осей X1Y1Z1;
В11 =(I2I3 i1) / Δ B12 = (I3I1I1) / Δ B13 = (I1I2i1) / Δ
B21= (I2I3j1) / Δ B22 = (I3I1j1) / Δ B23 = (I1I2j1) / Δ
В31 = (I2I3k1) / Δ B32 = (I3I2k1) /Δ В33 = (I1I2k1) / Δ. (12)
Для решения поставленной задачи необходимо знать проекции вектора V не в системе координат, связанной с АТС, а в горизонтальной системе координат XгYг Zг, в которой определяется перемещение АТС относительно подстилающей поверхности (см. 3.43, б и рис.3.44).
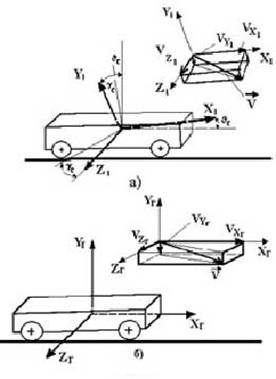
Рис.3.43. Перемещение автотранспортного средства
Переход от системы координат Xг Yг Zг к системе координат X1Y1Z1 осуществляется двумя последовательными поворотами: поворотом вокруг оси Zг на угол тангажа с: и поворотом оси X1 на угол крена γс. Все повороты осуществляются против часовой стрелки. Формулы (11) и (12) позволяют определить составляющие VХгVYгVZг в горизонтальной системе координат, если заменить орты I1j1k1 на орты горизонтальной системы координат Iг jг kг.
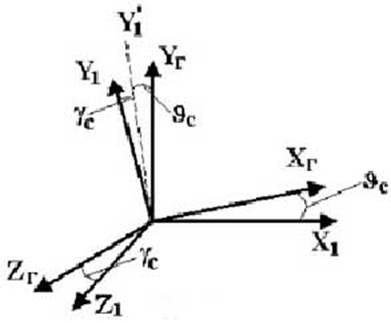
Рис. 3.44. Связь систем координат
В табл. 3.2 приведена связь[29] между ортами системы координат АТС и горизонтальной системы при наличии крена и тангажа. Составляющие VXгVYгVZг в горизонтальной системе координат определяются по составляющим VX1VY2VZ3 следующим образом:
VX г = (V i г) = VX 1 (i1 i г) + VY1 (j1 i г) + VZ1 (k1 j г),
VY г = (V j г) = VX 1 (i1 j г) + VY1 (j1 j г) + VZ1 (k1 j г),
VZг = (V k г) = VX 1 (i1 k г) + VY1 (j1 j г) + VZ1 (k1k г). (13)
На рис.3.45 представлена автомобильная (связанная) X1 Y1 Z1 и горизонтальная Xг Yг Zг системы координат. Формулы (13) являются общими формулами для пересчета составляющих из системы координат X1Y1Z1 в горизонтальную систему координат независимо от расположения антенных лучей датчика вектора скорости.
Таблица 3.2.
Связь между ортами системы координат АТС и горизонтальной системы
при наличии крена и тангажа
|
Орты |
I1 |
jl |
k1 |
|
Iг |
cos с |
– cosγc sinс |
sinγc sinс |
|
Jг |
sin с φс |
соsγс cosс |
– sinγc cosс |
|
kг |
0 |
sinγc |
cosс |
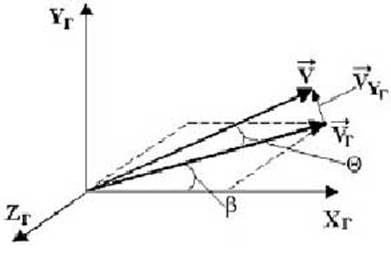
Рис.3.45. Положение вектора скорости в горизонтальной системе координат
На рис. 3.45 показано положение вектора скорости в горизонтальной системе координат. Составляющие вектора скорости V равны:
VXг= V сos Θ cosβ, VX 1 =V sinΘ, VX 1 = VcosΘsinβ, (14)
где Θ – угол наклона траектории (угол между касательной к траектории в вертикальной плоскости и горизонтом), β – угол сноса (угол между вектором путевой скорости – Vг и продольной осью АТС).
Угол сноса β и путевая скорость Vг (модуль горизонтальной составляющей вектора скорости) определяются из составляющих VXгVZг по формулам:
tg β = VXг/VXг, Vг =VXг/сosβ. (15)
Траекторный угол Θ может быть определен по данным измерений составляющих скорости (14) следующим образом:
tg Θ = VYГ/VГ = (VYГ/VГ) cosβ. (16)
Углы атаки α, тангажа с и траекторный угол Θ связаны соотношением:
с = α + Θ. (17)
Из сказанного следует, что для однозначного измерения вектора скорости АТС в общем случае необходимо и достаточно наличие трех некопланарных антенных лучей – условие (9) АТС.
Доплеровская частота при произвольных условиях движения. Пусть лучи антенной системы датчика вектора скорости жестко связаны с системой координат АТС и пусть орт луча Ii характеризуется углами Bi, Гi, где Bi – угол между Ii и плоскостью X1OZ1, а Гi – угол между проекцией луча на плоскость X1OZ1 и осью X1. Положение луча можно также характеризовать углами γi, νi, где γi – угол между направлением луча и осью X1, a νi – угол между направлением луча и осью Z1. Между углами BiГi и yглами νi γi имеется следующая зависимость:
cosγi = cosBicosГi cosνi = cosBisinГi. (18)
Вектор в системе координат X1Y1Z1 имеет координаты:
Ii1 = cos Bi соsГi, Ij1 = – sinBi, Iki = – cos Bi sinГi. (19)
Для определения проекции вектора скорости V на направление антенного луча Ii можно воспользоваться соотношением:
Vi = (V Ii) = ViГIiг + VjГIjг + VkгIkг. (20)
Подставляя в (2.2) выражения (2.14) и (2.15), находим при γc = с = 0
FДi = (2/λ) (VXг cosBi cosГi – VYг sinBi – VZг cosBi sinГi ) (21)
или
FДi =(2V/λ) [cosBi cos(Гi + β)cosΘ – sinBi sinΘ] = FДГ + FДВ, (22)
где FДГ – доплеровская частота от горизонтальной составляющей вектора скорости, FДВ – доплеровская частота от вертикальной составляющей вектора скорости.
Знак доплеровской частоты зависит от положения луча относительно вектора скорости V и может быть положительным или отрицательным.
Для определения доплеровской частоты при крене и тангаже АТС можно пересчитать - или координаты вектора li в горизонтальную систему координат, или координаты вектора V в систему координат АТС.
Воспользуемся первым методом. Координаты вектора Ii в горизонтальной системе координат определяются как скалярные произведения вектора Ii и соответствующих ортов горизонтальной системы координат:
Iiг = (Ii Iг), Ijг = (IiJг), Ikг = (Iikг). (23)
Воспользовавшись таблицами ля представления ортов Iгjгkг через орты I1j1k1 и подставив IiгIjгIkг из (23) в формулу (20) получим:
FДi = (2V/λ)cosγF = (2/λ)[VХгcosBi’cosГi‘ – VYГsinBi‘ – VZГcosBi‘sinГi‘], (24)
где:
cosBi’ cosГi‘ = cosBicosГicosc + sinBisinccosγc – сosBisinГisinγcsinc,
sinBi‘ = sin Bi cosccosγc – cosBi cosГi sinc – cosBi sinГi sinγccosc,
cosBi’cosГi‘ = cosBi sinГi cosγc + sin Bi sinγc,
cosγF = cosΘcosβcosBi’cosГi‘ + sinΘsinBi‘ – cosΘsinβcosBi’sinГi‘. (25)
В (24) углы Bi‘и Гi‘ являются углами орта Ii в горизонтальной системе координат.
Если воспользоваться вторым методом определения Fgi путем преобразования координат вектора V в систему координат АТС, получим:
FДi = 2/ λ = (VX 1cosBicosГi – VY1sinBi – VZ1cosBisinГi), (26)
где
VX 1VcosΘ‘cosβ‘ = VXгcosc + VYгsinc,
VY1VsinΘ‘ = ![]() VXгsinccosγc +VYГ cosγccosc + VZг sinγc,
VXгsinccosγc +VYГ cosγccosc + VZг sinγc,
VZ1VcosΘ‘cosβ‘ = VXГ sinγcsinc - VYГ sinγccosc + VZГ cosγc. (27)
Углы Θ‘ и β‘ характеризуют положение вектора V в системе координат АТС.
Воспользовавшись формулой (26), оценим влияние на доплеровскую частоту углов крена и тангажа. Ограничимся при этом углами 10-200 и представим функции cosγc, cosc, sinγc, sinc в виде ряда (sinx = x – x3/3! + …, cosx = 1 – x2/2! +…). Пренебрегая членами второго порядка малости по γc и c из (27), а также используя (14), получим:
VX 1 ![]() V(cosΘcosβ +csinΘ ),
V(cosΘcosβ +csinΘ ),
VY1![]() V sinΘ – ccosΘcosβ + cosΘsinβ),
V sinΘ – ccosΘcosβ + cosΘsinβ),
VZ1![]() V(cosΘsinβ – γcsinΘ). (28)
V(cosΘsinβ – γcsinΘ). (28)
Пользуясь последними соотношениями и формулой (26) рассмотрим случай горизонтального движения (ось OX1 АТС параллельна земле), Θ = 0.
Разность величины FДi и величины FДi0, которая равна значению доплеровской частоты при γc = V = 0, составляет:
FДi – FДi0 ≈ (2V/λ)( ccosβ - γcsinβ) sinBi, (29)
а при малом угле скоса β:
FДi – FДi0 ≈ (2V/λ) csinBi. (30)
Крутизна изменения доплеровской частоты (FДi - FДi0)/ FДi0 в зависимости от значения параметра c (тангаж) может быть представлена в следующем виде: δ FДi ![]() ctgBi/cosГ1 при Θ = 0.
ctgBi/cosГ1 при Θ = 0.
Определение проекции вектора скорости
При использовании трех некомпланарных лучей – условие (9), можно найти все три проекции скорости АТС. Вычисление составляющих VX1VY1VZ1 в системе координат, связанной с АТС, для любого расположения лучей производится по формулам (11). Общая формула для пересчета составляющих вектора скорости VX1VY1VZ1 из системы координат, связанной с АТС, в горизонтальную систему координат в соответствии с (13) имеет следующий вид:
VX г![]() VX 1cos c – VY1sinccos γc + VZ1sincsin γc,
VX 1cos c – VY1sinccos γc + VZ1sincsin γc,
VY г ![]() VX 1sin c + VY1cosccos γc – VZ1coscsin γc,
VX 1sin c + VY1cosccos γc – VZ1coscsin γc,
VZ г ![]() VY1sin γc + VZ1cos γc. (31)
VY1sin γc + VZ1cos γc. (31)
Определим составляющие VX 1VY 1VZ 1 для трех лучевого датчика вектора скорости АТС. Понятно, что доплеровские частоты, по которым определяются проекции вектора скорости, зависят от конкретного ориентирования в пространстве лучей антенной системы доплеровского измерителя. На рис.3.46 приведено принятое исходя из конструктивных соображений расположение лучей вектора скорости выносного датчика АТС.
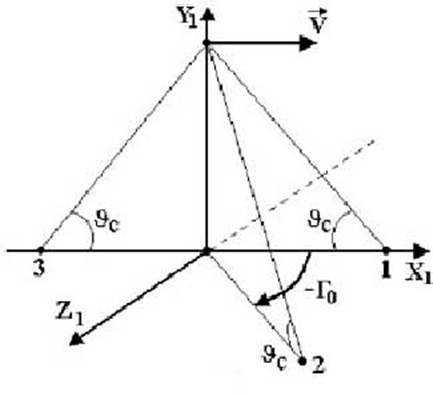
Рис. 3.46. Расположение лучей вектор скорости выносного датчика
Для такого расположения лучей в формулах (11), (12) следует положить:
В1 = В2 = В3 = В0 Г1 = 0, Г2 = – Г0 Г3 = π.. В результате (26) принимает вид:
FД1 = 2/λ (VX1cosB0 – VY1sinB0),
FД2 = 2/λ(VX1cosB0cosГ0 – VY1sinB0 + VZ1cosB0sinГ0),
FД3 = 2/λ(– VX1cosB0 – BY1sinB
Отсюда составляющие VX1VY1VZ1 определятся следующим образом:
VX 1 = [(FД1 – FД3)λ]/ (4cosB0), VY1 = – [(FД1 + FД3)λ]/(4sinB0),
VZ1 = (λ/4){[(2 FД2 – FД1 – FД3 ) – (FД1 – FД3)cosГ0]/(cosB0sinГ0)}. (33)
Модуль вектора скорости по известным проекциям может быть определен простым алгебраическим действием, а углы, характеризующие его положение и пространстве – по формулам (14) и (15).
Вычислительные алгоритмы определения
проекций вектора скорости
Эксплуатационные особенности применения трехлучевого автодинного датчика скорости. Во втором параграфе получены необходимые аналитические зависимости для определения вектора скорости как в горизонтальной (земной) системе координат (составляющие вектора скорости - VXгVYгVZг ), так и в связанной системе координат, связанной с кузовом АТС (составляющие-VX1VY1VZ1).Полученные зависимости являются обобщенными и не учитывают конкретную конструктивную реализацию датчика вектора скорости АТС.
Прежде, чем перейти к получению вычислительных алгоритмов для определения проекций вектора скорости, рассмотрим эксплуатационные особенности применения датчика вектора скорости.
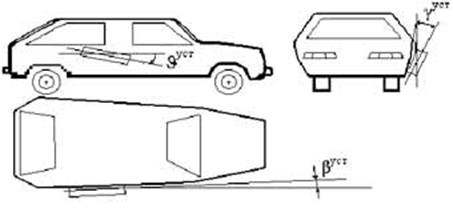
Рис. 3.47. Возможные угловые отклонения, вызванные достаточно произвольной установкой датчика скорости на кузове автотранспортного средства
Основными величинами, определяющими точность измерения ортогональных составляющих вектора скорости являются углы Вi, (вертикальный угол визирования – угол между лучом антенны и проекцией этого луча на плоскость X1OZ1 ) и Гi (горизонтальный угол визирования – угол между проекцией луча антенны на плоскость X1OZ1 и продольной осью АТС).
Исходя из конструктивных требований к компоновке датчика скорости, связанных с необходимостью его крепления к боковой поверхности кузова АТС (например, с помощью магнитной системы) или к подножке кабины АТС (например, посредством струбцины) выбрана схема расположения лучей, приведенная на рис.3.48. Вместе с тем понятно, что при оперативной установке датчика скорости на кузове автомобиля при проведении его техосмотра точность по фиксации углов Вi и Гi, составляющая доли углового градуса, выдержана не будет. Это может быть также обусловлено и конструктивными особенностями кузова АТС (округлость обводов, клиновидная форма и Т. п.).
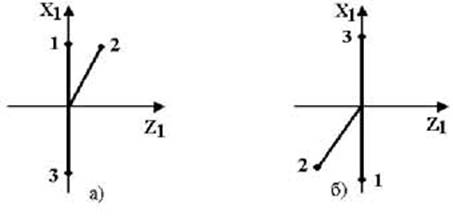
Рис.3.48. Схема расположения лучей при правостороннем
размещении датчика скорости
Возможные угловые отклонения, вызванные достаточно произвольной установкой ДС на кузове АТС условно изображены на рис. 3.47. В результате до начала измерений будут реализованы в каждом конкретном случае свои и, причем, неизвестные перед началом испытаний значения углов Вi‘и Гi‘. Однако, юстировка положения ДС при установке его на кузове АТС с тем, чтобы вывести упомянутые углы на заранее оговоренные значения, крайне нежелательна. В связи с этим представляется целесообразным предусмотреть непосредственно перед началом торможения АТС предварительные измерения и вычислительные процедуры, в ходе которых производится определение реализованных значений углов Вi‘ и Гi‘, конкретные величины которых зависят от установки ДС на АТС. Для этого в ходе проведения эксперимента должен быть предусмотрен предварительный этап по определению начальных условий. По вычисленным значениям установочных углов в дальнейшем и должна осуществляться обработка доплеровских сигналов с целью получения необходимой информации.
На рис. 3.47 представлены угловые отклонения при установке датчика скорости на кузов автомобиля. Еще одной особенностью использования датчика скорости является эксплуатационная необходимость установки его как с правого, так и с левого борта кузова автомобиля. Трехлучевая антенная система автодинного датчика скорости жестко привязана к корпусу выносного моноблока. При правостороннем его размещении схема расположения лучей в проекции на горизонтальную плоскость будет представлена в виде, изображенном на рис. 3.47, а, при левостороннем – в виде, изображенном на рис. 3.47, б. Учитывая, что направление движения ATC ориентировано по оси X1, знаки доплеровских частот в каналах 1, 2 и 3 в одном случае (при установке справа) будут соответственно:“+”,“+”,“–”, а в другом (при установке слева) “–”,“–”, “+”. Естественно, что вычислительне алгоритмы в связи с этим должны учитывать и реализованную в каждом конкретном случае схему расположения лучей датчика скорости.
Вычислительные алгоритмы предварительного этапа измерений. Целью предварительного этапа в процессе измерений эффективности тормозной системы АТС является определение установочных углов Bi‘ и Гi‘, реализованных конкретной установкой датчика скорости на кузове АТС, Т. е. в связанной системе координат. Для определения конкретных значений этих углов в системе координат X1Y1Z1, необходимо наложить некоторые ограничения на условия измерений. Такими ограничениями должны быть:
― прямолинейное равномерное движение АТС;
― отсутствие вертикальной и поперечной составляющей вектора скорости в связанной системе координат.
Эти условия могут быть обеспечены непосредственно перед началом торможения после предварительного разгона АТС.
При таких ограничениях связанная и горизонтальная системы координат совпадают, а антенная система координат, непосредственно связанная с корпусом датчика скорости (ДС), может быть получена из связанной путем последовательных поворотов против часовой стрелки вокруг оси Y1 на угол βуст, вокруг оси Z1 на угол уст и вокруг оси Zi на угол γуст.
Если предположить, что βуст![]() 0, а такое предположение можно допустить, Т. к. на боковой поверхности, практически, любого автомобиля возможно найти место для установки ДС с указанной угловой характеристикой, то можно при преобразовании координат обойтись двумя вращениями на углы γуст и уст и воспользоваться соотношениями, полученными в п.2. При сформулированных выше ограничениях имеем:
0, а такое предположение можно допустить, Т. к. на боковой поверхности, практически, любого автомобиля возможно найти место для установки ДС с указанной угловой характеристикой, то можно при преобразовании координат обойтись двумя вращениями на углы γуст и уст и воспользоваться соотношениями, полученными в п.2. При сформулированных выше ограничениях имеем:
V0 = VX1 = VXг VY1 = VYг= VZ1 = VZi =
Заменяя к выражениях (24) и (25) индекс “г” на “1”, γc и с на γуст и уст и используя ограничение (34), получим систему уравнений:
А1FД1 = (2V0/λ)cosB1’cosГ1’= (2V0/λ)[cosB1cosГ1cosуст + sinB1sinустcosγуст +
+ sinB1sinустcosγуст – cosB1sinГ1sin cosустsin γуст],
А2FД2 = (2V0/λ)cosB2’cosГ2’= (2V0/λ)[cosB2cosГ2cosуст + sinB2sinустcosγуст +
+ sinB2sinустcos γуст – cosB2sinГ2sin cosустsin γуст],
А3FД3 = (2V0/λ)cosB3’cosГ3’= (2V0/λ)[cosB3cosГ3cosуст + sinB3sinустcosγуст +
+ sinB3sinустcos γуст – cosB3sinГ2sincosустsinγуст]. (35)
Установочные углы Вi' Гi' характеризуют положение i-го луча в связанной системе координат, Т. е. в системе координат АТС. Поскольку исходя из конструктивных соображений ДС знак доплеровской частоты FД вместе с ее числовым значением не передается, перед FДi в (35) введены коэффициенты Ai, значения которых, а также значения углов Bi и Гi, определяются по таблице 2.
Таблица 3.3
Значения основных показателей при различных установках датчика скорости
|
Показатель |
Правосторонняя установка ДС |
Левосторонняя установка ДС |
|
1 |
2 |
3 |
|
A1 |
+1 |
– 1 |
|
A2 |
+ 1 |
– 1 |
|
A3 |
– 1 |
+ 1 |
|
B1+B2+B3 |
B0 |
B0 |
|
Г1 |
0 |
π |
|
Г2 |
– Г0 |
π–Г0 |
|
Г3 |
π |
0 |
Решив систему уравнений (35) относительно V0, γуст и уст из (25) находим искомые углы Bi‘ Гi‘:
B1‘ = arcsin[sinB1cosуст cos γуст – cosB1cosГ1sinуст – cosB1sinГ1sinγустcosуст],
B2‘ = arcsin[sinB2cosуст cos γуст – cosB2cosГ2sinуст – cosB2sinГ2sin γустcosуст],
B1‘ = arcsin[sinB3cosуст cos γуст – cosB3cosГ3sinуст – cosB3sinГ3sin γустcosуст],
Г1‘= arcsin[(1/cosB1‘)(cosB1sinГ1cosγуст + sinB1sinγуст)],
Г2‘ = arcsin[(1/cosB2‘)(cosB2sinГ2cosγуст + sinB2sinγуст)],
Г3‘ = arcsin[(1/cosB3‘)(cosB3sinГ3cosγуст + sinB3sinγуст)]. (36)
Вычислительные алгоритмы основного этапа измерений. Основной этап измерений начинается с момента нажатия на тормозную педаль АТС. С этого момента происходит динамическое изменение продольной составляющей скорости, появляются ее поперечные составляющие, углы крена и тангажа, а также в общем случае происходит расхождение связанной и горизонтальной систем координат. Для вычисления составляющих вектора скорости в горизонтальной системе координат, необходимые для определения системных показателей эффективности торможения АТС, воспользуемся полученными ранее (см. п.2) соотношениями и вычисленными (см. формулы (36)) значениями углов Bi‘и Гi‘. Из системы уравнений (26), где углы Вi, и Гi, заменяем на Bi‘и Гi‘ и которая тогда будет выглядеть как :
A1FД1 = (2/λ)[VX1cosB1’cosГ1‘– VY1sinB1‘–VZ1cosB1‘sinГ1‘],
A2FД2 = (2/λ)[VX1cosB2’cosГ2‘– VY1sinB2‘–VZ1cosB2‘sinГ2‘],
A3FД3 = (2/λ)[VX1cosB3’cosГ3‘– VY1sinB3‘–VZ1cosB3‘sinГ3‘], (37)
(здесь Аi берется из таблиц), определяем значения VXiVYiVZi – проекции вектора скорости АТС в связанной системе координат, а воспользовавшись (31), можно определить ее проекции в горизонтальной системе координат. Для вычисления составляющих V в горизонтальной системе координат на каждом такте измерения (вычисления) необходимо знать текущие значения углов тангажа (с) и крена (γc). Углы γc и с можно определить, воспользовавшись (28), положив Θ = 0, а β – имеющим малое значение, что на практике должно иметь место. Тогда (28) может быть представлено как:
VXi ![]() V(1 – β2/2), VY1
V(1 – β2/2), VY1![]() V(γcβ – с), VZ1
V(γcβ – с), VZ1![]() Vβ, (38)
Vβ, (38)
где величина V - модуль вектора скорости) V =![]() . Оценим влияние углов γc и с на значение доплеровской частоты FДi. Влияние углов будем оценивать по (30) и (31). Полагая Bi = 600, а Гi = 350, получаем, что δ FДi
. Оценим влияние углов γc и с на значение доплеровской частоты FДi. Влияние углов будем оценивать по (30) и (31). Полагая Bi = 600, а Гi = 350, получаем, что δ FДi![]() 2V, т. е. при изменении тангажа на 10 доплеровская частота изменится на 3,5%. Из (33) видно, что влияние γc на FДi в 1/β раз меньше, чем влияние с. Поскольку β имеет весьма малые значения (β≤60-100), влияние крена АТС на работу измерительной системы будет сказываться на порядок в меньшей степени. Кроме того следует отметить, что из физических соображений раскачивание кузова АТС в поперечном направлении, приводящее к образованию угла γc в процессе измерения, будет весьма незначительно. Основное влияние динамики торможения будет оказывать на тангаж АТС (так называемый “кивок” автомобиля). В связи c изложенным имеются все основания положить γc =0. Тогда с из (38) будет определено, как с = – (VY1/V).
2V, т. е. при изменении тангажа на 10 доплеровская частота изменится на 3,5%. Из (33) видно, что влияние γc на FДi в 1/β раз меньше, чем влияние с. Поскольку β имеет весьма малые значения (β≤60-100), влияние крена АТС на работу измерительной системы будет сказываться на порядок в меньшей степени. Кроме того следует отметить, что из физических соображений раскачивание кузова АТС в поперечном направлении, приводящее к образованию угла γc в процессе измерения, будет весьма незначительно. Основное влияние динамики торможения будет оказывать на тангаж АТС (так называемый “кивок” автомобиля). В связи c изложенным имеются все основания положить γc =0. Тогда с из (38) будет определено, как с = – (VY1/V).
Таким образом, проекции вектора скорости в горизонтальной системе координат из (32) определятся следующим способом:
VXг = VX1cosс – VY1sinс, VYг = VX1sin с + VY1cosс, VZг = VZ1. (38)
Вычислительные алгоритмы формирования разрешения предварительного этапа измерений. Предварительный этап измерений должен начинаться при достижении скорости автотранспортного средства некоторого значения V0. Для большинства АТС это значение установлено 40 км/ч (если АТС согласно руководству но эксплуатации не может развить такую скорость, то необходимо развивать максимальную для данного АТС скорость). Погрешность установки V0 допускается 10%. Формирование сигнала разрешения предварительного этапа измерения возможно путем обработки информации о доплеровской частоте в реальном масштабе времени с выходов, например, лучей 1 и 3 по упрощенным (т. к. к этому моменту еще отсутствуют сведения об установочных углах Вi‘, и Гi‘) алгоритмам, полученным из (32).
FД1 = (2VX1/λ)cos(B0 +уст )cosГ0,
FД3 = (2VX1/λ)cos(B0 – уст )cosГ0. (39)
Отсюда: VX1 = VXГ = (λ/4)[(FД1 + FД3)/(cosB0cosуст)], Т. к. Г0 = 0. Полагая cosуст ≈ 1 имеем расчетную зависимость:
VX1= VXi ≈ (λ/4)[( FД1 + FД3)/ cosB0]. (40)
Оценим влияние на измерение VХГ неточности установки ДС в вертикальной плоскости (по тангажу).
δV(уст) = (VXГ – VXГ0)/ VXГ0 = tgуст/ (2cosуст) ≈ (1/2) уст, (41)
где VXГ0 – измеренная скорость при уст = 0.
Из (41) следует, что на каждый градус неточной установки по углу уст вносится погрешность измерения скорости, равная 0,8%. Можно показать, что влияние установочных углов βуст и γуст на измерение V более, чем на порядок меньше влияния угла уст. В связи с этим можно утверждать, что при реальных диапазонах установки угла γуст перед началом испытаний, заданная погрешность измерения V с целью формирования сигнала на переход к основным этапам работы системы обеспечивается.
Системные вычислительные алгоритмы
Анализ требований[30] ГОСТ . Основная тормозная система АТС должна испытываться с начальной скорости 40 км/ч с точностью ее установки 4 км/ч. Погрешность измерения начальной скорости торможения 1,5 км/ч. Вспомогательная тормозная система АТС должна испытываться в диапазоне скоростей АТС 35÷25 км/ч. На основе приведенных инструментальных замеров должны определяться численные значения параметров тормозной диаграммы и тормозной путь АТС.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 |
