

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Легко убедиться, что при подсчете коэффициентов модели составляющие дрейфа rt взаимно уничтожаются и коэффициенты bi определяются в «чистом виде», как если бы дрейфа не было. Например:
![]() и т. д. (кроме b0).
и т. д. (кроме b0).
Аналогично производят разбиение на два блока ПФЭ-24, только в этом случае строят две полуреплики ДФЭ-24-2 с генерирующими соотношениями X4=X1X2X3 и X4=-X1X2X3, а блоковую составляющую Pбл. приравнивают X1X2X3X4. В том случае, если стабильность условий можно обеспечить только для четырех опытов ПФЭ-24 можно разбить на четыре блока, каждый из которых строится как четверть реплика ДФЭ-24-2 с генерирующими соотношениями:
1) X3=X1X2, X4=X1X2X3
2) X3=-X1X2, X4=X1X2X3
3) X3=X1X2, X4=-X1X2X3
4) X3=-X1X2, X4=-X1X2X3.
Проведение эксперимента осуществляют по блокам. Планирование в условиях дискретного дрейфа позволяет проводить дублирование опытов внутри блока. Рандомизация порядка проведения опытов внутри блока проводится обычным способом.
Проверка воспроизводимости и расчет коэффициентов так же осуществляется по известной методике (см. разделы 3.6 и 3.7). Значимость коэффициентов bi производят по t-критерию Стьюдента. Математическое описание объекта имеет вид:
 (5.3)
(5.3)
Проверка адекватности производится по F-критерию Фишера (см. раздел 3.8).
5.3. Планирование эксперимента в условиях линейного непрерывного дрейфа
При непрерывном временном дрейфе влияние управляемых переменных на выходную функцию У заметно сказывается уже при переходе от опыта к опыту. Простейшим случаем непрерывного дрейфа является линейный дрейф.
 Планирование эксперимента ортогонально линейному дрейфу проводят с помощью матрицы планирования ПФЭ типа N=2L (L=log2N, 2L=N), что оказывается возможным, если при каждом последующем измерении составляющая линейного дрейфа изменяется на одну и ту же величину.
Планирование эксперимента ортогонально линейному дрейфу проводят с помощью матрицы планирования ПФЭ типа N=2L (L=log2N, 2L=N), что оказывается возможным, если при каждом последующем измерении составляющая линейного дрейфа изменяется на одну и ту же величину.
Выполнение этого условия не встречает особых затруднений, если опыты проводить через строго определенные, равные промежутки времени rt = const (рис.5.1). Величину rt выбирают из условия rt ³ max{t}, где max{t} – максимальное эквивалентное запаздывание реакции отклика по i-каналу. Можно легко показать, что в этом случае линейный дрейф представим ступенчатой функцией (с N уровнями) и для представления этой функции необходимо L=log2N первых столбцов (не считая нулевого) матрицы ПФЭ (см. табл. 5.2).
Таблица 5.2.
Матрица планирования при непрерывном линейном дрейфе
Время | Дрейф | Планирование | ||||||
P0 | P1 | P2 | P3 | X0 | X1 | X1X2 | ||
U0 | U1 | U2 | U3 | U1U2 | U1U2 | U1U2 | U1U2U3 | |
1 | + | - | - | - | + | + | + | - |
2 | + | + | - | - | - | - | + | + |
3 | + | - | + | - | - | + | - | + |
4 | + | + | + | - | + | - | - | - |
5 | + | - | - | + | + | - | - | + |
6 | + | + | - | + | - | + | - | - |
7 | + | - | + | + | - | - | + | - |
8 | + | + | + | + | + | + | + | + |
Описание дрейфа имеет вид
 (5.4)
(5.4)
где  оценки коэффициентов, определяемые обычным методом. Оставшиеся столбцы матрицы можно использовать для планирования эксперимента. Правило получения планирования, ортогонального линейному дрейфу заключается в следующем:
оценки коэффициентов, определяемые обычным методом. Оставшиеся столбцы матрицы можно использовать для планирования эксперимента. Правило получения планирования, ортогонального линейному дрейфу заключается в следующем:
1) составляют матрицу ПФЭ-![]() из условия
из условия ![]() , где r – число определяемых основных эффектов (линейных и взаимодействия);
, где r – число определяемых основных эффектов (линейных и взаимодействия);
2) первые L+1 столбцов используют для представления дрейфа (5.4);
3) оставшаяся часть матрицы есть искомое планирование, позволяющее определить коэффициенты неполной квадратичной модели.
Указание положения для объекта с двумя факторами, в случае N=23=8 иллюстрируются табл. 5.2.
Предлагаемый план дает возможность получить уравнение «истинной зависимости»
 (5.5)
(5.5)
коэффициенты которой определяются независимо от дрейфа.
Общее уравнение связи для такого дрейфующего объекта имеет вид
 (5.6)
(5.6)

где b0(t) – изменение свободного члена b0 – определяющее смещение поверхности отклика во времени.
Опыты при линейном дрейфе надо выполнять строго последовательно через равные интервалы rt согласно плану (табл. 5.2)
В условиях непрерывного дрейфа дублирование опытов невозможно, проверку воспроизводимости не производят.
Расчет коэффициентов модели (5.6) и проверку значимости коэффициентов по t-критерию Стьюдента производят по известным формулам. При этом дисперсию воспроизводимости S2y по отдельной серии опытов. Адекватность модели проверяют так же по известным формулам.
6. ОПТИМИЗАЦИЯ УСТРОЙСТВ И СИСТЕМ МЕТОДОМ МНОГОФАКТОРНОГО ЭКСПЕРИМЕНТА
6.1. Особенности экспериментальных методов оптимизации
Задачи оптимизации – одно из основных направлений разработки, производства и эксплуатации различных систем. Они являются математическими и их решение состоит в отыскании в заданной области при заданных ограничениях таких значений независимых переменных, которые обеспечивают экстремум отклика, называемого здесь целевой функцией.
Существуют следующие аналитические методы оптимизации: линейные и нелинейные или математические, программирование, принцип максимума, динамическое программирование и др. Применение аналитических методов требует математического описания динамики объекта, приспособленное к одному из существующих методов оптимизации. В основу этих методов положено известное из математического анализа свойство функции, имеющей экстремум (максимум или минимум): первая производная этой функции в точке экстремума обращается в нуль. Если необходимо найти полную производную в k-факторном пространстве, то находят k частных производных по каждому из k факторов и получают систему из k уравнений.



 (6.1)
(6.1)
Решением системы (6.1) и является вектор
 (6.2)
(6.2)
определяющий такие значения факторов, при которых целевая функция достигают экстремум. Однако во многих практических случаях точное аналитическое описание динамики объекта не удается получить. Тогда, если одновременно наблюдать все k-факторы и целевую функцию, задачу оптимизации проще решить с помощью экспериментального поиска, опираясь на математическое планирование экспериментальных поисковых экспериментов.
Оптимизация методом многофакторного эксперимента в значительной мере формализована и большинство решений принимается в соответствии с требованиями стандартной процедуры.
Основой процедуры являются, метод крутого восхождения и планирование второго порядка.
6.2. Метод крутого восхождения Бокса-Уисона
Из известных градиентных экспериментальных методов планирования эксперимента (метод Гаусса-Зайделя, симплексный метод и др.) наиболее эффективным является метод крутого восхождения (спуска) Бокса - Уилсона.
В результате постановки факторного эксперимента и определения коэффициентов регрессии мы получаем уравнение регрессии, описывающее изучаемую функцию. Практически это означает, что для рассматриваемой области известна зависимость Y=f(x1,x2,…,xk). Поэтому для любой точки исследуемой области может быть определено направление градиента функции. В этом случае, если функция представлена уравнением первого порядка, т. е. линейное приближение адекватно, появляется возможность определить направление градиента непосредственно величинами коэффициентами регрессии при линейных членах – bi. Точнее коэффициенты модели y представляют одновременно коэффициенты в выражении для градиента функции отклика
 (6.3)
(6.3)
где ![]() - единичные векторы в направлении координатных осей.
- единичные векторы в направлении координатных осей.
Стратегия крутого восхождения иллюстрируется рис.6.1.
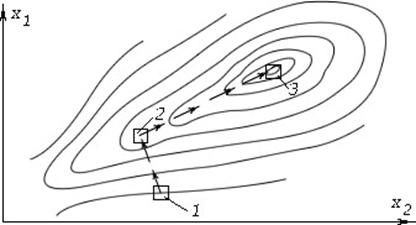
Рис. 6.1. Стратегия крутого восхождения
Модель в произвольной области эксперимента «1» , принадлежащей области исследования Д, строится на основе ПФЭ-2K или ДФЭ-2K-p. Если линейная её часть адекватна, то она используется как градиентная функция (6.З) для определения направления движения к ближайшему условному экстремуму (область «2»). При движении по градиенту в направлении области f(x1,x2) значения отклика измеряются и вычисляются по уравнению регрессии через мысленные (расчетные) опыты. Движение по градиенту Ñ1y останавливается, когда значение функции отклика начинает уменьшаться. Ставится новая серия опытов ПФЭ-2K, определяется новое направление Ñ2y, проводятся мысленные опыты и совершается движение в новом направлении Ñ2y. В области экстремума («3») ставится серия опытов второго порядка для точного описания её. Далее, переходя к канонической форме уравнения второго порядка, можно просто построить геометрический образ области экстремума.
6.3. Расчет серии опытов по методу крутого восхождения
Расчет начинают с перехода от кодированных к натуральным переменным. Для этого вычисляют произведения bili для всех факторов, у которых bi оказались значимыми. Затем выбирают фактор, для которого произведение bili оказалось наименьшим по абсолютной величине, и находят величины отношений ½bili½ остальных факторов к ½bili½ для выбранного фактора. Полученным таким образом коэффициентам пропорциональности К приписывают знаки, соответствующие знакам bi каждого фактора.
Выбрав какой-либо определенный шаг варьирования для движения по градиенту фактора с наименьшим произведением ½bili½, вычисляют шаги для остальных факторов, умножая величину выбранного шага на коэффициенты пропорциональности К соответствующие этим факторам.
Последующее планирование в случае отыскания максимума функции сводится к изменению уровней факторов путем одновременного прибавления или вычитания (в зависимости от знака коэффициента регрессии) рассчитанных шагов к исходному (в данном случае основному) уровню. Такая операция повторяется до тех пор, пока будет наблюдаться увеличение выхода процесса.
Описанная вше последовательность операций проиллюстрирована примером расчета серии опытов по методу крутого восхождения. В таблице приведены условия постановки опыта по плану ДФЭ-27-3 (основные уровни единицы варьирования и рассчитанные по результатам факторного эксперимента величины коэффициентов регрессии - bi). Статистический анализ показал, что при 5%-oм уровне значимости оказались значимыми следующие коэффициенты регрессий b1=3.06; b4=9.19; b6=2.81; b7=14.56.
Таблица 6.1
Расчет и результаты серии опытов по методу крутого восхождения
X1 | X2 | X3 | X4 | X5 | X6 | X7 | |
Основной уровень | 200 | 125 | 30 | 300 | 125 | 12,5 | 60 |
Единица варьирования li | 100 | 75 | 20 | 200 | 75 | 7,5 | 40 |
bi | 3.06 | 1.81 | 1.31 | -9.19 | 0 | 2.81 | 14.56 |
bili | 306 | - | - | -1838 | - | 21.1 | 582 |
K=bili/(bblb)min | 14.5 | - | - | -87.1 | - | 1 | 27.6 |
li*=Kli* | 30 | - | - | -180 | - | 2 | 60 |
U | Варианты опытов | yu | ||||||
1 | 230 | 125 | 30 | 120 | 125 | 14,5 | 120 | 140 |
2 | 260 | " | " | " | " | 16,5 | 180 | 164 |
3 | 290 | " | " | " | " | 18,5 | 240 | 251 |
4 | 320 | " | " | " | " | 20,5 | 300 | 264 |
5 | 350 | " | " | " | " | 22,5 | 360 | 300 |
6 | 380 | " | " | " | " | 24,5 | 420 | 340 |
7 | 410 | " | " | " | " | 26,5 | 480 | 345 |
8 | 440 | " | " | " | " | 28,5 | 540 | 353 |
9 | 470 | " | " | " | " | 30,5 | 600 | 350 |
10 | 500 | " | " | " | " | 32,5 | 660 | 350 |
11 | 530 | " | " | " | " | 34,5 | 720 | 357 |
12 | 560 | " | " | " | " | 36,5 | 780 | 360 |
13 | 590 | " | " | " | " | 38,5 | 840 | 355 |
14 | 620 | " | " | " | " | 40,5 | 900 | 360 |
15 | 650 | " | " | " | " | 42,5 | 960 | 305 |
16 | 680 | " | " | " | " | 44,5 | 1020 | 290 |
17 | 710 | " | " | " | " | 46,5 | 1080 | 280 |
Для выделенных четырех факторов рассчитывали произведения bili. Поскольку наименьший по абсолютной величине оказалось произведение bblb=21.1 были найдены отношения bili:bblb=ki. Выбрав за основу в расчете шаг для фактора bblb*=2.0, рассчитали величины шага для остальных трех факторов умножением Ki на lb. Приняв за исходный уровень крутого восхождения основной уровень дробного факторного эксперимента, рассчитали серию опытов, изменяя концентрации факторов (x1,x4,x6,x7) на вычисленные значения li*. Остальные факторы фиксировали на основном уровне ДФЭ.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 |
