
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 , (8)
, (8)
где 
или
![]() - для двигателей типа А,
- для двигателей типа А,
 - для двигателей типа В, (9)
- для двигателей типа В, (9)
![]() - для двигателей типа С.
- для двигателей типа С.
Формулы (8),(9) позволяют оценить влияние температуры масла на мощность механических потерь в начальный момент времени, величина которой и определяет длительность обкатки двигателя до значений, соответствующих обкатанному.
Использованные источники
1. Гаенко расчета и определения режима приработки автомобильных дизельных двигателей после капитального ремонта.-М.: Транспорт, 1967. – 68 с.
2. , , . Определение мощности механических потерь в процессе обкатки двигателей внутреннего сгорания // Агропанорама, 2004, №6. С. 27-30.
3. , , . Исследование мощности механических потерь в зависимости от времени, температуры масла и скорости изменения режимов обкатки. // Агропанорама, 2006, №1. С. 27-31.
О ДОКАЗАТЕЛЬСТВЕ ТЕОРЕМЫ ФЕРМА И СРАВНЕНИИ ЧИСЕЛ ПО НЕНУЛЕВОМУ РАЦИОНАЛЬНОМУ МОДУЛЮ
*, **
*Белорусский национальный технический университет, Беларусь
**БИП, институт правоведения, Беларусь
Как известно, суть теоремы Ферма состоит в том, что при натуральных n>2 уравнение xn+yn=zn не имеет решений в целых положительных числах. Прошло не одно столетие, как она была высказана. Многие выдающиеся математики пытались её доказать. Наибольших результатов достиг Куммер, который доказал, что указанная теорема верна тогда, когда простой нечётный показатель степени р не делит числителей чисел Бернулли [1]. В том случае доказательство о справедливости теоремы не даёт ответа, если р делит числители чисел Бернулли.
Уайлс в 1994 году представил доказательство теоремы Ферма. Однако в [2] указано, что теорема Танияма Симуры была доказана авторами в 1999 году, которые, основываясь на работе Уайлза. доказали остальные случаи.
В 1995 году Эндрю Уайлз и Ричард Тейлор доказали особый случай теоремы Танияма-Симуры (случай полустабильных эллиптических кривых). Согласно мнения, изложенного в [2], этого было якобы достаточно для доказательства теоремы П. Ферма. Однако в работе [3] показано, что теорема Риберта не неверна, а представленная полустабильная эллиптическая кривая не модулярна.
Об ошибочном доказательстве теоремы П. Ферма Уайлзом имеются также cведения в [4].
В работах [3,5-7,9] приведены «доказательства» теоремы П. Ферма. В указанных работах нет связи с делимостью числителя чисел Бернулли на простой нечётный показатель степени р, а также имеются неточности и делаются произвольные необоснованные допущения, поэтому существующие доказательства не убедительны, вызывают сомнения и требуют дальнейшего глубокого изучения. Нами предложено сравнение по ненулевому рациональному модулю [9].
Известно, что иррегулярные простые числа делят числители чисел Бернулли [1]. Что касается простого целого иррегулярного числа р, то это анологично, если сравнивать по ненулевому рациональному модулю. При делении р на v, где р-иррегулярное число, v-регулярное (р выбрано большим v) p:v=f, где f – дробное число >1. Аналогично, если Вm (число числителя чисел Бернулли) делится на иррегулярное р, то имеем Вm:a1=p (где а1- целое число от деления числителя чисел Бернулли). В случае, если Вm:a2=p (где а2- дробное число >1 от деления числителя чисел Бернулли Вm на р, если оно было регулярным, то в обоих случаях Вm:( Bm:P) независимо от того р делит или не делит Вm (a2=a1.f). Следует учитывать тот факт, что всякое натуральное число сравнимо по ненулевому рациональному модулю независимо от того делится или не делится число r на k при r>k ( r=mod 0(r:k)). Аналогично это относится и к сравнению типа h=q(mod s) (в нашем случае q=0), где s может быть целым или дробным числом >1.
На основании выше изложенного, так как ![]() ,поэтому
,поэтому ![]() и
и ![]()
![]() m
m ![]() . Так как
. Так как ![]() здесь равно одному из чисел в 2, 4, …,
здесь равно одному из чисел в 2, 4, …, ![]() (
(![]() ;
; ![]() ),то по следствию теоремы [1] и доказанной теоремы[8] число
),то по следствию теоремы [1] и доказанной теоремы[8] число ![]() – иррегулярное и их число бесконечно, но
– иррегулярное и их число бесконечно, но ![]() , где
, где ![]() ;
; ![]() ,
, ![]() – целое число,
– целое число, ![]() – число с остатком после деления
– число с остатком после деления ![]() на
на ![]() .
. ![]() , то число регулярных простых чисел также бесконечно. Этим все сказано как о подлинности теоремы П. Ферма, так и о бесконечности регулярных простых чисел. Обобщая полученные данные и литературные источники, в дополнение к высказанным ранее, предлагаются следующие теоремы.
, то число регулярных простых чисел также бесконечно. Этим все сказано как о подлинности теоремы П. Ферма, так и о бесконечности регулярных простых чисел. Обобщая полученные данные и литературные источники, в дополнение к высказанным ранее, предлагаются следующие теоремы.
1. Доказать, может ли уравнение (x+y)n-(xn+yn)=zn иметь решения в целых числах при n≥5 ( x≠y≠0; n-простое число).
2. Доказать, может ли уравнение (x+y)n- (xm+ym)=zp иметь решения в целых числах (x≠y≠0; m≠n≠p; m<n; m, n,p≥3-простые числа).
3. Доказать, существует ли бесконечное множество простых значений чисел n, при которых число 2n-1составное.
4. Доказать, существует бесконечное множество значений n, при которых число:[(2.2).(2.3)..(2.(n+1))]-1 простое.
5. Доказать, является ли простое число Мерсена р особым, если число рn+ pn-1+ pn-2 +…..+ p2 + p + 1 также простое при нечётном количестве чисел рn, pn-1,…., p2, p, 1(n≥2).
6. Cуществует ли простое число к>3, для которого число рn + рn-1 +...+ р2 + p + 1(где р=2к - 1) является простым при нечётном количестве чисел рn, pn-1,…,p,1(n≥2).
7. Доказать, является ли простое число Мерсена р особым, если число рn+np+1 также простое при простом n.
Использованные источники
1. , Шафаревич чисел. М.: Наука.-1985.-368 с..
2.Цымбалов Ферма (очередная попытка её доказать)//Инновация в образовании. 2008.- №2.-с.108-112.
3.Лещинский Вандивера. Сборник статей.- Минск.: БНТУ, 2008.- 24с.
4.Ивлев доказательство Уайлса Великой теоремы П. Ферма.//Фундаментальные исследования./Академия естествознания. М-2008, №3.-с.13-16.
5.Мокроносов собака зарыта (доказательство великой теоремы Ферма)//Естественные и технические науки..-2007.- №5.- с.- 35-41.
6.Теорема о трёх корнях и два доказательства теоремы Ферма.//Естественные и технические науки.- 2006.-№1.-с.35-36.
7.Серединский проблемы Ферма. Изд-во Казанского Университета. – 2000.- 67С.
8 , Подлозный чисел на основе сравнения по ненулевому рациональному модулю. Тезисы докладов 3-й Международной конференции. М.: МФТИ.-2008.-С.142-144
9 Камлия Ферма и разложимость степенных вычетов. Сухум. Абхазский научный центр академии космонавтики им. .- 200с.
Использование logit-log преобразования калибровочных кривых в конкурентном иммуноферментном анализе при определении концентрации сывороточного кортизола
,
Российский центр функциональной хирургической гастроэнтерологии, Россия
Кубанский государственный медицинский университет, Россия
В основе современного твердофазного иммуноферментного анализа (ИФА) лежат сложные биологические и физико-химические процессы, влияющие на характер получаемых данных и накладывающие определенные ограничения на применимость методов математической обработки результатов [2].
Из двух рутинных вариантов ИФА, сэндвич-метода и конкурентного анализа, в некоторой степени больший интерес для нас представляет последний, т. к. в нем имеется обратная зависимость оптической плотности (ОП) проб от концентрации аналита в образце и нелинейный характер этой зависимости [3, 6].
В конкурентном ИФА определяют белковые вещества (антигены) с небольшой молекулярной массой и имеющие лишь одну антигенную детерминанту (эпитоп). Параллельно с пробой, содержащей аналит, в лунки планшета вносят в избытке тот же антиген, но конъюгированный с ферментом. Соответственно, чем ниже концентрация искомого вещества в образце, тем больше меченого антигена свяжется с антителами на твердой фазе и тем выше будет конечная ОП пробы.
Зависимость величины регистрируемого сигнала от концентрации аналита в пробе всегда носит нелинейный характер, что затрудняет построение адекватных калибровочных кривых (КК) и дальнейший расчет содержания веществ в исследуемых образцах [4, 5].
Процесс построения КК представляет собой задачу аппроксимации зависимости ОП от концентрации аналита в пробе. Нахождение приближенных значений функции в промежутках между точками с известными ее значениями называют интерполяцией [4]. Это классический вариант обработки результатов ИФА. Частным неклассическим случаем интерполяции является экстраполяция, с которой мы сталкиваемся, когда нужно определить концентрацию антигена в пробе, ОП которой выше, чем в калибраторе с максимальным значением концентрации, или ниже, чем в калибраторе с минимальной концентрацией.
При экстраполяции значения концентраций аналита, определяемые по КК, построенным разными методами, могут различаться очень существенно. Исходя из нашего опыта определения сывороточного кортизола, экстраполяции следует вообще избегать. Это предполагает, что пробы со значениями ОП выше максимальных калибровочных следует исследовать повторно в двух-трехкратном разведении, а конечный результат получать умножением на фактор 2 или 3. Экстраполяция ниже первой калибровочной точки должна считаться ошибкой, даже если программное обеспечение позволяет ее осуществлять, и исключаться из анализа [1].
Сам процесс построения КК может реализовываться в различных масштабах осей. Линейные оси практически не используются, т. к. концентрация белковых аналитов (в нашем случае кортизола) в образцах варьирует в широких пределах, включающих несколько порядков.
Определенным выходом из вышеописанной проблемы является построение КК в логарифмических осях. Но таким графиком сложно пользоваться из-за большой «крутизны», затрудняющей точное геометрическое определение низких концентраций искомого компонента. Иногда уже при использовании для построения оригинальных значений сигнала и натуральных или десятичных логарифмов концентраций удается добиться существенной линеаризации калибровочного графика. Недостатком описанного метода построения КК является неопределенность логарифмической функции в точке «0», поэтому использовать калибратор с нулевой концентрацией кортизола для построения КК невозможно [3, 4].
Построение графиков для конкурентных анализов и сравнение различных протоколов упрощается, если представить данные следующим образом: из оригинальных значений сигнала предварительно вычесть среднюю величину фонового сигнала (неспецифического связывания) и представить полученные значения в виде десятичной дроби от среднего значения сигнала в нулевом калибраторе. Обработанные таким образом оригинальные данные обозначают В/В0, либо r. Для переменной r можно в дальнейшем применить преобразование logit:
logit(r) = ln((1 – r)/r).
Когда по оси Y наносится logit (r), а по оси X – натуральный логарифм концентрации, построенный таким образом график будет называться преобразованием logit-log. При этом КК часто, хотя и не всегда, преобразуется практически в прямую линию. На этом графике возможные погрешности отдельных калибровочных проб обнаруживаются при визуальной оценке значительно легче, а обработка данных определения концентрации сывороточного кортизола является более адекватной.
Выводы:
1. Проведение конкурентного иммуноферментного анализа сопровождается трудностями в построении калибровочных кривых и расчете по ним неизвестных концентраций.
2. Для нивелирования разного рода погрешностей и облегчения обработки эмпирических данных следует использовать различные типы математического преобразования.
3. При определении концентрации кортизола наиболее приемлемым является logit-log преобразование, при котором достигается полная линеаризация калибровочной кривой.
Использованные источники
1. , , Ушаков состояния человека: математические подходы. – Москва, 2003. – С. 34-42, 304-312.
2. Иммуноферментный анализ / Под. ред. Т. Нго, Г. Ленхоффа – Москва, 1988. – С. 172-189, 385-394.
3. Кишкун по лабораторным методам диагностики. – Издательская группа «ГЭОТАР-Медиа», 2007. – С. 299-301, 442-444, 532-644.
4. , , Полынцев математической обработки данных в иммуноферментном анализе. Теоретические основы // Клиническая лабораторная диагностика. – 2008. – №1 – С. 3-9.
5. , , Полынцев математической обработки данных в иммуноферментном анализе. Сравнительная оценка реализованных в различном программном обеспечении математических методов обработки данных ИФА // Клиническая лабораторная диагностика. – 2008. – №1 – С. 10-17.
6. Твердофазный иммуноферментный анализ / Сборник научных трудов. – Л., 1988. – С. 3-27.
МОДЕЛЬ АДАПТИВНОГО УПРАВЛЕНИЯ ПРИ НЕПОЛНОЙ ОПРЕДЕЛЕННОСТИ
Технологический институт Южного федерального университета в г. Таганроге, Россия
Науч. рук.: В.B. Финаев, д. техн. н., профессор
Одним из современных фундаментальных направлений научных исследований является разработка методов моделирования объектов, адаптивного управления и синтеза самонастраивающихся систем управления, в том числе с нечеткой логикой, в условиях недостаточной априорно информации об объектах управления, сложной формализации процесса функционирования технологического процесса, а также в социальных системах.
В современной теории управления и в нелинейной динамике существует потребность в качественно новых результатах практической направленности. В настоящее время существует конструктивная аналитическая теория адаптивных систем управления, что указывает на высокий уровень развития данной науки. Однако по-прежнему проблема адаптивного и самоорганизующегося управления является актуальной, т. к. математическая модель процессов и систем высокой сложности часто не может быть идентифицирована и сертифицирована.
Адаптивные системы управления в процессе своего функционирования используют информацию о неопределенности в задаче управления. Чаще всего адаптация достигается посредством формирования в явном виде математической модели объекта или воздействия на него.
В настоящее время развита теория адаптивного регулятора, с которым связана возможность решения «безмодельного управления». Одним из вариантов реализации адаптивного регулятора является применение вероятностных автоматов с перестраиваемой структурой.
Опыт по разработке и практическому применению моделей адаптивного управления в условиях априорной неопределенности недостаточно проанализирован и обобщен, что затрудняет выбор наиболее эффективных направлений автоматизации, сдерживает темпы внедрения разработанных автоматических устройств и создает трудности при эксплуатации автоматизированных предприятий.
Учитывая современное развитие средств вычислительной и микропроцессорной техники, предлагается подход к построению автоматических систем управления с применением стохастических обучаемых автоматных систем.
Рассмотрим возможность применения вероятностных автоматов (ВА) для задач моделирования адаптивных систем управления (СУ), в которых реализован принцип обучаемости, исходя из анализа сигналов обратной связи [1].
Структура взаимодействия СУ c внешней средой организована таким образом, что выходные сигналы (действия) СУ yt подаются на вход объекта управления (ОУ). Выходные сигналы ОУ xt для СУ называются реакциями на управления. Класс реакций делят на два подкласса: класс положительных реакций и класс отрицательных реакций.
Если модель ОУ представим в виде вектора C=(a1,a2,...,ar), то за действие в такте времени t yj(t) (j=1,2,…,r) с вероятностью qj в такте времени (t+1) СУ получит сигнал поощрения x1, либо с вероятностью pj сигнал наказания x2, причем вероятности определяются следующим образом: qj=(1+aj)/2, pj=(1-aj)/2.
Существуют асимптотически оптимальные автоматы, обладающие целесообразным поведением, для которых математическое ожидание выигрыша удовлетворяет условию
 ,
,
где: sj ‑ финальные вероятности управлений.
Известны модификации данных автоматов: автомат с линейной тактикой, автомат В. И.Кpинcкого, автомат В. Ю.Кpылова, квазиоптимальный автомат и другие.
Выход объекта управления определен моделью управляемого случайного процесса (СП), для которого определены вероятности:
pt+1(M/xt, yt)= =P{xt+1ÎM/x1,x2,...,xt, y0,y1,...,yt}, MÍM, t³0,
при заданных измеримом фазовом пространстве (X, M) и пространстве управления (Y, N), где M, N ‑ сигма алгебры.
Правило выбора управлений представляет условное распределение
Ft(N/xt, yt), NÍN, t³1.
Стратегией управляемого CП называется совокупность s правил выбора управлений. Каждая стратегия выделяет конкретный CП из класса, порождаемого семейством управляемых условных вероятностей.
Рассматривается класс K управляемых CП и класс Ф функционалов на траекториях процессов из K. Задано S={s} для всех CП из K, порождающее вероятностные меры на пространстве элементарных событий. Сформулирована цель управления, относящаяся к произвольной паре (e, j) из (K´Ф) и достижимая на всем этом множестве.
Адаптивной автоматной системой управления называется стратегия, которая приводит к цели управления для всякой паpы (e, j) из (K´Ф) за конечное время.
Модель элементарной обучаемой системы задается в виде тройки UF=(X, Y,F) и реализует стационарную стратегию s, где F – правило управления
Обозначим через Dl совокупность всех условных распределений на Y вида
 ,
,
измеримых на множестве Xl´Yl-1, и пуcть D¥={Dl}. Непустое подмножество DÍD¥ является множеством допустимых правил. Обозначим через U* множество всех элементарных управляющих систем, которое сопоставлено множеству D допустимых правил
(UFÎU*)«(UF=(X, Y,F), FÎD), т. е. U*=(X, Y,D).
Пусть на управляемом CП et заданы m³1 функционалов, а именно: измеримое отображение zt: Xt´YtàRm, где Rm ‑m-мерное евклидово пространство. Символом T обозначим отображение DàD, т. е. T:DàD.
Рассматривается двухпараметрическое семейство ![]() таких отображений, параметрами которых служат статистика и время. Зависимость T от z говорит о том, что в каждый момент времени вид T определяется предысторией. Модель обучаемой системы L задается в виде двойки L=[U*,
таких отображений, параметрами которых служат статистика и время. Зависимость T от z говорит о том, что в каждый момент времени вид T определяется предысторией. Модель обучаемой системы L задается в виде двойки L=[U*,![]() ].
].
Функционирование обучаемой автоматной системы управления L отображается временными диаграммами:
®xtàxtàFt+1=![]() Ftàyt+1àxt+1àFt+2=
Ftàyt+1àxt+1àFt+2=![]() Ft+1àyt+2® ... .
Ft+1àyt+2® ... .
Реализовать автоматную обучаемую систему управления можно в виде контроллера в микропроцессорном варианте исполнения. Учитывая высокое быстродействие современных процессоров, можно выбрать такую частоту подачи сигналов управления и анализа реакций на эти управления, что любые стохастические изменения можно формально определять как тренд. В этом случае нет необходимости разрабатывать сложные математические модели, например в виде дифференциальных уравнений.
Самый простой алгоритм обучаемости можно применить на основе работы стохастической модели Буша-Моcтеллеpа. Модель задается в виде тройки
U=(X, Y,D), D={p1,p2,…,pr},  , pi>0.
, pi>0.
Элементы вектора P изменяются в зависимости от сигналов реакции.
Применение данного подхода позволяет разрабатывать и внедрять на предприятиях послеуборочной обработки зерна эффективные контроллеры, обеспечивающие высокое качество машин и механизмов. Непосредственно адаптивная обучаемая автоматная система реализована на конечном автомате Мура.
Использованные источники
1. , Мажди Наср Аллах. Адаптивные автоматные системы управления/Монография. – Таганрог: Изд-во ТТИ ЮФУ, 2008. ‑ 151 с.
2. Финаев В. И., Бесшапошников нечетких критериев нечеткого выбора. Сборник трудов Шестого Европейского конгресса интеллектуальных технологий и программного продукта, сентябрь 7-10, 1998. Аахен, Германия. ‑с.
3. , , Целых и методы принятия решений в интегрированных интеллектуальных системах. – Ростов-на-Дону: Изд-во РГУ, 1999. – 278 с.
4. Мушик Э., Мюллер П. Методы принятия технических решений / Пер. с нем. - М.: Мир, 19с.
Theory of Random Processes and their Use in Forestry and Forest Ecology
Jan KOUBA
Czech University of Life Sciences Prague, Faculty of Environmental Sciences, Czech Republic
Since the sixties, J. KOUBA has been developing applications of theories of random processes, reliability, and operational research methods to express and model the age structure development, forest production and their steering – in sense of sustainable use; considering the economic risk represented in forestry namely by calamities evoked by abiotic, biotic anthropogenic impacts. The results are quoted by authors from significant European universities (for ex. Forest Academy Sankt Petersburg, Agric. Univ. Kaunas, Univ. Goettingen, Univ. Freiburg, TU Muenchen, Dresden, TU Zurich, Warszawa, Kraków, BOKU Wiena, Univ. Sopron, Bucharest, etc). The forest in during its growth exposed to effects of harmful agents. Each of them has its own course with the view to time. Generally, an adverse effect increases with the age. This fact causes the certainty of forest production to decrease with the age and so the risk of the forest management to increase. The mentioned uncertainty (risk) at a certain age can be expressed by the probability of a forest stand or a certain age class destruction based on the theory of random processes, the measure of the mentioned destruction can be expressed similarly (KOUBA 1969 e. t.c). The first results of use of regular Markov chains was published in Doklady TSChA (Timiriyazev Agricultural Academy), Moscow 1973. One example of this way - are on Fig. 1. The results of optimal steering of processe of adjustemenet to stochastically defined normal forest (Kouba 1977) trought continuous linear programming are illustrated on Fig. 2 (Kouba and Zahradník 2004). This metod was used von Gurjanov from Forest Academy of Sankt Petersburg (2004) too. The major attention is focused on the estimate of the mean number of years of further forest life with the respect to the achieved age as well as other time values stemming from the theory of reliability (renewal). Weibull function of probability distribution (1939) and Korf´s growth function (1939) was used to describe the basic functions of the reliability theory. The studied processes are furthermore described in a discrete form by absorbtion Markov this way also effects of individual harmful factors can be visualised. An abridged table of forest life (a forestry analogy to life tables for the human population) represents an important result. At the same time the relationship the methods of insurance mathematics can be seen. (See Tab. 1). The use for forest insurace mathematics on basis of methods of life insurance are from Slovakia and in Germany – Holecy and Hannewinkel (2006). Going to end is the example of computing of N- years return period of yearly salvage cuttigs for whole forests of Czech Republic based on state statistics in period of 1920 – 2007 (Kouba et al. 2007, Kouba and Zahradník 2008 in print). The Г function of probability distribution is used there. This results are a basis for forests insurance methods based on non-life insurance. From methodological point of view it is a analogy of methods used in hydrology (for example 20, 50 or 100 yearly floods).
Literature
1. Gantmacher, F.,R. 1966. Teorija matric. Nauka, Moscow
2. Kemeny, J. G., Snell, L. J. 1960. Finite Markov Chains. Van Nostrand, Princeton
3. Kouba, J. 1973. Cepi Markova i opredeljenije normalnogo lesa. (Markov chains and normal forest.) Doklady TSChA Moscov, 194: 185-191
4. Kouba, J. 1977. Markov chains and modelling the long-term development of the age structure and production of forests. Proposal of a new theory of the normal forest. Scientia agriculturae bohemoslovaca, 9 (3): 179-193
5. Kouba, J. 2002. Das Leben des Waldes und seine Lebensunsicherheit. (Forest Life and its Temporal Uncertainty). Forstwissenschaftliches Centralblatt, : 211-228
6. Kouba, J., Zahradník, D. 2004. Forest production steering to sustained yield under risk condition by interactive linear programming task construction. Scientia Agriculturae Bohemica,: 140-146
7. Kouba, J., et al. 2007. The volume of annual salvage felling in Czech republic and their N‑year return periods. Lesnická práce 2: 20-21

Fig. 1. Relation between the decennial increment I(t) and the decennial total felling E(t), in m3 ha-1 for Czech republic for 15 age stages. Number of decennia (t) are designatet by the figures of the points.
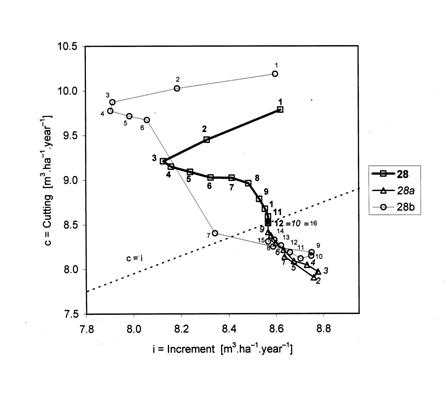
Fig. 2. Development of relationship between the total cut and total increment during the conversion process to sustained yield.
Fig. 3. The volume of yearly (annual) salvage felling (YSF) Qt and their N–year return periods Nt (NRP) for 2, 5, 10 … 200, 500 years (Kouba and Zahradník 2008 in print)
Tab. I. Abridged forest life table (KOUBA 2000) | |||||||||
Age (years) | Death probability | Forest area survived to age of | Expecta- tion of forest life (years) | Age class | Damaged area per 100ha of lived forest | ||||
x | q(x) | l(x) | e(x) | Snow | Wind | Fire | Total | ||
0 | 0,000000 | 100,00 | 136,4 | 0 – 20 | 1,68 | 0,12 | 0,20 | 2,00 | |
20 | 0,006646 | 99,34 | 117,2 | 20 - 40 | 7,64 | 0,65 | 0,20 | 8,49 | |
40 | 0,051325 | 94,87 | 102,2 | 40 - 60 | 9,51 | 1,98 | 0,20 | 11,69 | |
60 | 0,165263 | 83,47 | 94,7 | 60 – 80 | 2,52 | 4,41 | 0,20 | 7,13 | |
80 | 0,243650 | 75,64 | 83,6 | 80 – 100 | 0,07 | 8,18 | 0,20 | 8,45 | |
100 | 0,294252 | 70,57 | 68,9 | 100 – 120 | 0,00 | 12,43 | 0,20 | 13,63 | |
120 | 0,370589 | 62,94 | 55,9 | 120 – 140 | 0,00 | 20,15 | 0,20 | 20,35 | |
140 | 0,476328 | 52,37 | 45,1 | 140 – 160 | 0,00 | 28,17 | 0,20 | 28,37 | |
160 | 0,603179 | 39,68 | 36,3 | 160 – 180 | 0,00 | 37,18 | 0,20 | 37,38 | |
180 | 0,733545 | 26,65 | 29,2 | 180 – 200 | 0,00 | 46,74 | 0,20 | 46,94 | |
200 | 0,846271 | 15,37 | 23,5 | 200 – 220 | 0,00 | 56,36 | 0,20 | 56,56 | |
220 | 0,926357 | 7,36 | 19,1 | 220 – 240 | 0,00 | 65,53 | 0,20 | 65,73 | |
240 | 0,971788 | 2,82 | 15,6 | 240 – 260 | 0,00 | 73,84 | 0,20 | 74,04 | |
260 | 0,991703 | 0,83 | 12,8 | 260 – 280 | 0,00 | 80,97 | 0,20 | 81,17 | |
280 | 0,998208 | 0,18 | 10,6 | 280 – 300 | 0,00 | 86,77 | 0,20 | 86,97 | |
300 | 0,999729 | 0,03 | 8,8 | 300 – 320 | 0,00 | 91,24 | 0,20 | 91,44 | |
320 | 0,999973 | 0,00 | 7,4 | 320 – 340 | 0,00 | 94,49 | 0,20 | 94,69 | |
340 | 0,999998 | 0,00 | 6,3 | 340 – 360 | 0,00 | 96,72 | 0,20 | 96,92 | |
360 | 1,000000 | 0,00 | 5,4 | 0,00 | 99,80 | 0,20 | 100,00 | ||
380 | 1,000000 | 0,00 | 4,6 | ||||||
Автоматизированное получение оптимального плана платежей

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
