
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
3. Drilling Equipment Division. Wilson products.//Каталог бурового оборудования.- 200с.
Автоматизированный комплекс для подготовки к проведению холецистэктомических хирургических операций
Невинномысский институт экономики, управления и права, Россия
В последние годы всё большую популярность приобретает техника выполнения хирургических операций, которая связана с возможностью выполнения всего комплекса медицинских манипуляций на оперируемом органе при минимальной длине разреза и по возможности меньшего рассечения тканей на пути к операционной точке. В частности, всё шире применяется методика лапароскопии, при которой операция выполняется через проколы в брюшной стенке без открытого разреза [1,2]. Такие методики обладают значительными преимуществами, которые предоставляет пациенту незначительный размер операционной раны: малая кровопотеря, сокращение времени послеоперационной реабилитации, уменьшение болевого синдрома, снижение риска послеоперационных осложнений и т. д.
С другой стороны, для практической реализации всех потенциальных преимуществ этих методов выполнения хирургических операций хирург должен максимально точно знать, где располагается операционная точка в проекции на поверхность тела пациента, т. к. при отклонении положения хирургических инструментов от нормали к поверхности на угол φ>500 хирургические манипуляции становятся неточными и опасными, а при больших углах отклонения – невозможными. Ситуация осложняется ещё и индивидуальными особенностями телосложения пациента (брахиморфное, стандартное или долихоморфное), которые могут привести к тому, что стандартная точка центра разреза, рекомендованная для больных с нормальным телосложением, приведёт к значительным углам φ.
Перед автором статьи была поставлена задача разработки математической модели и создание автоматизированного комплекса, который бы помог хирургу выбрать положение операционного поля для выполнения холецистэктомических хирургических операций, исходя из особенностей телосложения пациента, считая положением операционной точки шейку желчного пузыря. В математическую модель (рис.1) и последующие компьютерные расчёты необходимо было заложить следующие неизменные параметры операции: диаметр разреза – 9 см, средняя длина хирургических инструментов – 15 см, предельный угол отклонения инструмента от нормали – 500.
В качестве среды разработки автоматизированного комплекса был выбран язык программирования Delphi 6.0.
На главной форме (рис. 2) расположены: блок расчёта расстояния от точки операции до точки разреза, блок индикации ошибок ввода, блок наглядного рисунка, блок установки проекции операционной точки на поверхность тела, блок вычисляемых параметров и расчёта погрешности, меню перехода к математической модели, кнопка выхода из программы.

Рисунок 1 Математическая модель, положенная в основу программного комплекса.
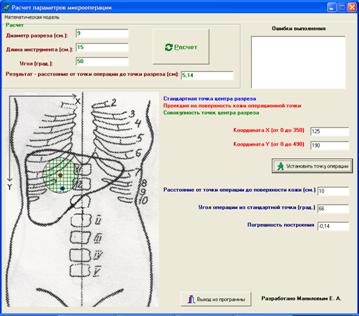
Рисунок 2 Главный вид программного комплекса.
Алгоритм использования программы состоит в следующем. Хирург вводит параметры в блоке ”Расчёт”. Если всё верно, специалист нажимает кнопку ”Расчёт” и получает расстояние от точки операции до точки разреза. При неправильно заданных параметрах программа выведет список допущенных ошибок. Затем хирург вводит координаты проекции операционной точки, полученные с помощью УЗИ, и нажимает на кнопку ”Установить точку операции”. В результате этих действий врач получает на рисунке следующие элементы: стандартная точка операции без учёта особенностей телосложения (синий цвет), проекцию операционной точки на поверхность тела (красный цвет), совокупность возможных точек центра разреза (зелёный цвет).
Преимуществами данного автоматизированного комплекса являются: низкие требования к оперативной памяти и объёму жёсткого диска, что позволяет внедрять этот программный продукт даже на компьютерах предыдущих поколений, установленных в медицинских учреждениях; отсутствие необходимости инсталляции программы; простота и удобство использования, не требующие от врачей специальных навыков работы с компьютером.
Автор считает своим долгом поблагодарить студента гр. ПОД-041 НИЭУП за ценные советы по оптимизации программного кода.
Использованные источники
1. http://www. *****/small_invasive/lapascopy-surgery. html
2. http://gallbladder. *****/cholelithiasis_treatment/laparoscopic_cholecystectomy/
Методика использования теории систем с распределенными параметрами для моделирования технических систем
Балаковский институт техники, технологии и управления
(филиал) Саратовского государственного технического университета, Россия
При разработке и анализе элементов и устройств технических систем инженеру приходится сталкиваться с разработкой математической модели, которая позволяет понять, как устроен объект, определять наилучшие способы управления при заданных целях и критериях, прогнозировать прямые и косвенные последствия реализации заданных способов и форм воздействия на объект. Точность математической модели в большей степени связана с адекватностью использования математического аппарата, выбранного для описания физики, механики объекта. Большинство объектов и систем с достаточной степенью точности можно описать одним или несколькими обыкновенными дифференциальными уравнениями относительно функции состояния Q(t), то есть использовать аппарат теории систем с сосредоточенными параметрами. Но на практике функция состояния объекта Q может существенно меняться в зависимости от пространственной координаты х, так как любой объект имеет вполне определенные геометрические параметры. В подобных системах используется теория систем с распределенными параметрами [1,2].
Базовой моделью для математического описания систем с распределенными параметрами являются уравнения вида:
 (1)
(1)
где Q(x, t) – функция состояния объекта в распределенных параметрах,
зависящая от времени t и от вектора х пространственных
координат;
f(x, t) – известная функция внешнего воздействия;
Q0(x) – начальная функция, описывающая распределение в
замкнутой области ![]() состояния объекта в начальный момент
состояния объекта в начальный момент
времени;
g(x, t) – граничные условия, характеризующие взаимодействие
объекта с внешней средой на границе ![]() ;
;
L, N, Г – некоторые известные операторы.
собраны около полутысячи подобных (1) задач, для которых приведены их важнейшие характеристики: функции Грина, стандартизирующие функции, континуальные передаточные функции [1]. Задача инженера в этом случае заключается в выборе соответствующего уравнения, проведения его идентификации и расчете требуемых характеристик.
На первоначальном этапе необходимо выбрать уравнение из соответствующей группы. Оговоримся, что будем рассматривать лишь динамические системы.
В зависимости от физики процесса выбирается:
а) уравнения гиперболического типа, содержащие вторую производную функции состояния Q по времени t (колебательные процессы различной природы);
б) уравнения параболического типа, содержащие первую производную функции состояния Q по времени t (процессы теплопроводности, диффузии, распространение электромагнитных волн, движение вязкой жидкости).
Исходя из геометрии моделируемого объекта, выбирается:
а) количество пространственных координат (одно-, двух-, трехмерные);
б) система координат (декартовая, полярная, цилиндрическая).
На втором этапе осуществляется идентификация выбранного уравнения. Рассмотрим ряд примеров.
Уравнение гиперболического типа - колебания струны (стержня) [1, с.79-82]:
![]() . (2)
. (2)
Осуществим идентификацию входящих величин:
Q(x, t) - деформация струны (стержня), м;
f(x, t) – входное возмущение, м/с2;
a – волновая скорость, м/с.
Входное возмущение на струну определяется следующим образом:
 ,
,
где g(x, t) – погонное усилие на струну (стержень), Н/м;
ρ – погонная плотность, кг/м.
Волновая скорость зависит от типа колебаний. Для поперечных колебаний струны:
 ,
,
где Т – натяжение струны, Н.
Для продольных колебаний стержня:
 ,
,
где Е – модуль упругости, Н/м2;
S – площадь поперечного сечения стержня, м2.
Уравнение параболического типа – уравнение теплопроводности [1, с.49-51]:
 . (3)
. (3)
Осуществим идентификацию входящих величин:
Q(x, t) – температура стержня, К;
f(x, t) – тепловой поток, К/с;
a2 – коэффициент температуропроводности, м2/с, рассчитываемый по формуле:
 ,
,
где λ – коэффициент теплопроводности материала, Дж/(с∙м∙К);
ρ – плотность материала, кг/м3;
с – удельная теплоемкость материала, Дж/(кг∙К).
Идентификация осуществляется выбором первичной размерности. Например, в качестве первичной размерности выбирается размерность функции состояния Q(x, t). Исходя из этого, определяется размерность входного воздействия f(x, t). В принципе, можно поступать и наоборот. Задавать в качестве первичной размерности входную функцию f(x, t) и определять, какую размерность будет иметь выходная величина Q(x, t).
На третьем этапе описывается геометрия объекта в численных значениях, задается вид входного воздействия f(x, t), начальных Q0(x) и граничных g(x, t) условий в виде функций или констант, рассчитываются коэффициенты в зависимости от свойств материала объекта. После данного этапа все готово, для проведения расчетов, под которыми понимают получение и исследование выражений для выходной функции состояния Q(x, t) и интегральной передаточной функции W∫(x, p).
На четвертом этапе рассчитывается функция состояния Q(x, t) согласно выражению [1, c.10]:
 . (4)
. (4)
Здесь использованы две функции, вид которых приведен в справочнике для конкретного уравнения [1]: G(x,ξ,t) – функция Грина и ω(ξ,τ) – стандартизирующая функция.
Функция Грина является решением краевой задачи при нулевых начальных и однородных граничных условий на входное воздействие в виде δ-функции. Стандартизирующая функция, в свою очередь, является входным воздействием на систему, компенсирующим влияние начальных и граничных условий. Стандартизирующая функция имеет вид суммы отдельных слагаемых, включающих входное воздействие, начальные функции и граничные функции. С учетом принятых на третьем этапе выражений для f(x, t), Q0(x), g(x, t), стандартизирующая функция записывается в конкретном для рассматриваемой задачи виде.
Особого внимания заслуживают аргументы, входящие в выражение (4). Так как воздействие на систему (объект) в распределенных параметрах может осуществляться в один момент времени и в одну часть пространственной области, а ее реакцию необходимо, например, наблюдать в другой момент времени и в другой части пространственной области, то эти аргументы разделяются:
ξ, τ – входные аргументы пространства и времени;
x, t – выходные аргументы пространства и времени.
Решая выражение (4), получаем зависимость, позволяющая оценивать величину функции состояния Q в любой момент времени t и в любой точке области D.
На последнем этапе проводится расчет интегральной передаточной функции. В теории СРП используется понятие континуальной передаточной функции W(x,ξ,p), которая находится путем выполнения преобразования Лапласа от функции Грина, то есть данная функция является точечной (импульсной) передаточной функцией в пределах области D. Она приводится в справочнике и зависит как от входного ξ, так и выходного х пространственного аргумента. Зная вид входного выражения, рассчитывается интегральная функция W∫(x, p), являющаяся уже только функцией выходного аргумента х [3]:
 , (5)
, (5)
где  - преобразованная по Лапласу стандартизирующая функция с выделенным из нее входным воздействием:
- преобразованная по Лапласу стандартизирующая функция с выделенным из нее входным воздействием:
 .
.
Осуществляя расчеты согласно (5), на практике получают довольно громоздкие выражения. Предлагается для конкретной точки пространственной области х построить логарифмическую амплитудно-частотную характеристику и провести ее аппроксимацию стандартными типовыми наклонами и записать аппроксимированную передаточную функцию, позволяющую более наглядно оценивать динамику процесса.
Использованные источники
1. Бутковский систем с распределенными параметрами. – М.: Наука, 1979. – 224с.
2. Рапопорт моделирование объектов и систем управления с распределенными параметрами: Учеб. пособие / . – М.: Высш. шк., 2003. – 299 с.: ил.
3. Власов интегральной передаточной функции для объектов управления с распределенными параметрами / // сб. метод. трудов каф. «Управление и информатика в технических системах» Балаковского ин-та техники, технологии и управления. М.: Буркин, 1998. – С.65-127.
Анализ банковских данных с использованием авторегрессионных моделей
Самарский государственный университет, Россия
(факультет экономики и управления, 4 курс)
Науч. рук.: , к. физ.-мат. н., доцент
В настоящее время является актуальным анализ динамических данных. Наиболее распространенными группами моделей аппроксимации и прогнозирования статистических данных считаются модели скользящего среднего СС(q), авторегрессионные модели АР(m) и модели авторегрессии – скользящего среднего АРСС(m, q) [1].
В данной работе изучались модели АP(m) и АРСС(m, q) на примере данных об объеме выданных ссуд физическим лица в году, предоставленных отделением Сбербанка России города Самары.
Известно, что рассмотренные модели применяются при анализе стационарных временных рядов, и не предназначены для описания процессов с тенденцией. Однако, они достаточно точно и гибко отображают колебания уровней ряда, что в значительной степени важно для описания развития неустойчивых экономических показателей.[2,3]
Для большинства экономических характеристик свойственно наличие взаимозависимости уровней ряда. На этом свойстве и основано построение АР-модели. В общем виде модель АР(m) (m порядок авторегрессии) представляется как взвешенная сумма предыдущих наблюдений:
 ,
,  . (1)
. (1)
Если временной ряд (ВР) имеет математическое ожидание, существенно отличное от нуля, то предполагается наличие колебаний относительно постоянной средней и модель АР(m) принимает вид:
 , . (2)
, . (2)
Авторегрессионные процессы характеризуются экспоненциально затухающей или затухающей по синусоиде функцией автокорреляции. При этом статистически значимые коэффициенты автокорреляции ![]() или частной автокорреляции указывают на порядок модели m.
или частной автокорреляции указывают на порядок модели m.
Чтобы применить АР модель к процессам, характеризуемым тенденцией, данные очищают от неслучайной составляющей путем перехода к стационарному ряду, образованному последовательными разностями, соответствующего порядка. Таким образом модель АР(m) преобразуется к модели авторегрессии разностных временных рядов AP(m, d), определяемой двумя параметрами m и d, где d – порядком конечных разностей:
 , . (3)
, . (3)
Порядок используемых разностей может быть определен при анализе поведения дисперсий ![]() исходного и разностных рядов, представляемых соотношением:
исходного и разностных рядов, представляемых соотношением:
 ,
,  . (4)
. (4)
Величина, начиная с которой дисперсия стабилизируется принимается за оптимальный порядок.
Известно, что АРСС(p, q) - модель представляет собой объединение моделей авторегрессионного процесса и скользящего среднего:
 , . (5)
, . (5)
где ![]() - коэффициенты авторегрессии; p – порядок уравнения авторегрессии; q – порядок уравнения скользящего среднего;
- коэффициенты авторегрессии; p – порядок уравнения авторегрессии; q – порядок уравнения скользящего среднего; ![]() – параметры уравнения скользящего среднего. При наличие тренда так же анализируются ряды разностей порядка d. В этом случае модель (5) называется авторегрессионной интегрированной моделью скользящего среднего АРИСС(p, d,q) и принимает вид:
– параметры уравнения скользящего среднего. При наличие тренда так же анализируются ряды разностей порядка d. В этом случае модель (5) называется авторегрессионной интегрированной моделью скользящего среднего АРИСС(p, d,q) и принимает вид:
 (6).
(6).
После оценки параметров моделей (3) и (6) переходят к исходным данным.
При оценке параметров АР-модели используются как нелинейные методы, так и линейные, такие как МНК или система Юла–Уокера [1]
 (7).
(7).
Существует 2 группы методов оценки параметров модели АРСС. Первая группа основывается на представлении модели АРСС(p, q) в виде модели АР(p) с ошибками ![]() , которые удовлетворяют свойствам процесса скользящего среднего порядка q. Применение методов второй группы использует преобразование АРСС(p, q)-модели в модель СС(q), выражая уравнения ряда
, которые удовлетворяют свойствам процесса скользящего среднего порядка q. Применение методов второй группы использует преобразование АРСС(p, q)-модели в модель СС(q), выражая уравнения ряда ![]() через линейную комбинацию ошибок. Оценка свободного члена
через линейную комбинацию ошибок. Оценка свободного члена ![]() для моделей (2),(3),(5),(6) производится из равенства:
для моделей (2),(3),(5),(6) производится из равенства:
 (8)
(8)
В работе были построены модели АР(1,3) и АРСС(1,3,d) (d=1,2,3,4) для данных о выданных ссудах физическим лица за 21 месяц, и произведен ретропрогноз на период трех последующих месяцев.
Таблица 1 содержит расчетные данные (прогнозные уровни разностного ряда порядка 3 и прогнозные уровни исходного ВР) для моделей АР(1,3) и АРИСС(1,3,3). Точность прогнозирования по построенным моделям выражена в относительной ошибке прогноза. Оценка параметров модели АР(1,3) выполнялась МНК и с использованием системы (7). Модель АРИСС(1,3,3) была использована для корректировки найденной АР(1,3)-модели. Оценка параметров СС-модели, включенной в АРИСС, произведена из условия минимизации дисперсии остатков модели с использованием численных методов.
Таблица 1 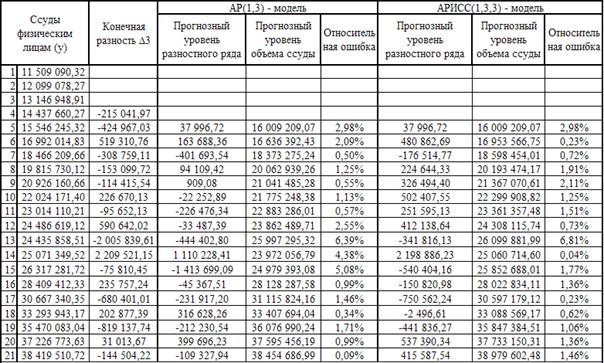
Основные показатели, характеризующие модели АР(1,3) и АРСС(1,3,d) (d=1,2,3,4), представлены в таблице 2. Анализ показывает, что минимизация дисперсии ошибки при оценке параметров не всегда приводит к уменьшению средней относительной ошибки аппроксимации.
Таблица 2

В работе точечный ретропрогноз и прогноз на k шагов упреждения для модели АР строится с использованием предшествующих расчетных уровней ряда по формуле:
 ,
,  . (9)
. (9)
При прогнозировании АРСС-модели отсутствуют данные об эмпирических уровнях ряда, поэтому ошибка прогноза считается равной нулю. Точечный прогноз определяется из следующей формулы:
 . (12)
. (12)
Таким образом при шаге прогноза k>q прогнозирование по модели АРСС сводится к построению прогноза АР–модели.
Прогнозные значения для моделей АР(1,3), АРИСС(1,3,2) и АРИСС(1,3,3) на 3 шага представлены в таблице 3.
Таблица 3
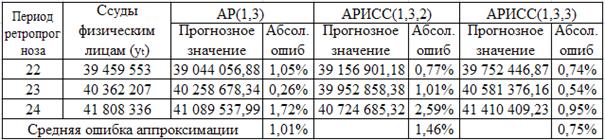
Как видно из таблицы 3 лучший прогноз был получен с использованием модели АРИСС(1,3,3), при этом средняя ошибка аппроксимации меньше на 0,26% по сравнению с прогнозом АР(1,3).
Таким образом, в результате работы получены параметры моделей АР(1,3) и АРСС(1,3,d) (d=1,2,3,4), построены ретропрогнозы по данным моделям, произведен сравнительный анализ динамических данных.
Использованные источники
1. Дайитбегов технологии анализа данных в эконометрике. – М.: ИНФРА-М – Вузовский учебник, 2008. – XIV. 578 с.–(Научная книга).
2. , . Анализ временных рядов и прогнозирование: Учебние. – М.: Финансы и статистика, 2001. – 228 с.
3. Статистические методы прогнозирования: Учебное пособие для вузов. – М.: ЮНИТИ-ДАНА, 2003. – 206 с.
Адресная система размещения материалов на складе
,
Воронежский институт высоких технологий, Россия
Науч. рук.: , д. техн. н, профессор
Способ размещения товаров на складе выбирают в зависимости от задач, способа хранения, актуальности и необходимости максимального использования объема складского помещения, при рациональном расположении секций, доступности любой ячейки склада для механизмов на крупных складах, защиты товаров от повреждения и быстрого нахождения необходимых товаров. Задачами складирования, хранения и внедрения автоматизированных систем расположения товаров занимаются сторонние компании (аутсорсинг).
Для того, чтобы ускорить процесс размещения и отбора, обеспечения требуемых режимов хранения обычно изучают и при необходимости разрабатывают схему размещения товаров, предусматривая постоянные места хранения, возможность наблюдения за их сохранностью и ухода за ними. При разработке схем принимаются во внимание оптимальные способы укладки, периодичность и объемы поступления/отгрузки товаров, условия их отгрузок, а для некоторых видов товаров и "правильное соседство". В отдельных случаях, если есть необходимость в "свободе маневра", применяют переменные места хранения товаров. При размещении товаров используется принцип "больше спрос - ближе к проезду (проходу)". Таким образом, товары, которые пользуются высоким спросом, хранятся в непосредственной близости от зоны отгрузки или выдачи. Как правило, часто отпускаемые товары составляют лишь небольшую часть ассортимента, располагать их необходимо вдоль так называемых горячих линий или зон (легко доступных и ближних). Товары, требующиеся реже, отодвигают на "второй план" и размещают вдоль "холодных" линий.
Также практикуется выделение участков длительного и краткосрочного хранения. На участках краткосрочного хранения располагают товары, у которых быстрый оборот.
Наиболее интересная и заслуживающая внимания идея, это адресная система.
Независимо от того, крупный склад или небольшой, обязательно следует ввести единую адресную систему размещения товаров (условные обозначения), иначе неизбежны потери, пересортица и убытки. Это особо важно для обеспечения увеличения оборота, исключения ошибок в размещении товаров и быстрого нахождения их даже новыми сотрудниками после короткого инструктажа. Каждому месту хранения присваивается код (адрес), обозначающий номер стеллажа, номер вертикальной секции и номер полки. Адрес может иметь 4-5 знаков и более. Программным способом обеспечивают автоматическое указание адресов в заявках на сборку (комплектовочных листах), ведомостях инвентаризации. Ведомости инвентаризации и комплектовочные листы для отбора товаров печатают с сортировкой по адресам.
Приведем пример наиболее распространенной адресной системы: номер ячейки А1739, где А, Б, В - зона хранения или часть склада; 17 - порядковый номер стеллажа; 3 - порядковый номер вертикальной секции стеллажа; 9 - порядковый номер полки.
Очевидно, что эта нумерация пригодна для зоны из 99 стеллажей и что каждый стеллаж может иметь не более 10 вертикальных секций и не более 10 полок. Для большего количества вертикальных секций и полок применяют двузначные номера, но чаще стремятся использовать условное разделение склада на зоны и используют буквенный индекс зоны.
Внедрение адресной системы требует всего около одного человеко-месяц и включает разметку на планах складов, изготовление номеров, их крепления или нанесения краской, внесение адресов из спецификации в компьютер, параллельно корректировка программ. Это позволит служащему находить деталь по названию и адресу не зная ее внешнего вида.
Адреса наносят яркой краской на конструкции стеллажей, отсеков, на пол. Пространство без стеллажей либо конструктивно, либо условно с помощью разметки также может делиться на зоны и отсеки.
В программе печати накладных для отбора товары нужно сортировать по адресам хранения. Это помогает лучше организовать работу персонала, исключить лишние перемещения по складу. Схемы размещения стеллажей или штабелей с указанием адресов хранения вывешивают на стенах, чтобы служащие склада могли изучить их и легко ориентироваться.
Комплектовщики или другие сотрудники склада получают лист комплектации (маршрутную карту) и производят отбор товаров с мест хранения. Комплектовочный лист необходимо печатать таким образом, чтобы перечень товара был составлен не в алфавитном порядке, а в порядке возрастания адресов хранения. Это значительно ускоряет отбор товаров.
На очень крупных складах применяется технология отбора товаров на складе без использования отборочного листа. Отборщик пользуется компьютерным терминалом типа "ноутбук". Обмен данными между терминалом и сервером может быть организован либо посредством дискет, либо по радиоканалам.
Обмен информацией по радиоканалам более оперативен и применяется в системах с высоким количеством экстренных заказов. Сервер может прерывать процесс отбора товаров по текущим заказам и потребовать выполнения приоритетного заказа.
Применение портативных терминалов позволяет проводить инвентаризации без остановки работы склада. Если отборщик закончил отбор товаров и у него имеется свободное время, то на терминал выводится задание - провести инвентаризацию товаров в определенной ячейке стеллажа в ближайшем к отборщику проходе. Использование портативных терминалов позволяет организовать учет работы каждого отборщика по производительности труда, качеству работы, использованию рабочего времени и др.
После отбора товара и выяснения возможных проблем (например, нехватки товара, требующей корректировки отгрузочных документов) партию товара упаковывают.
Как видим, существует немало подходов и методов оптимизации системы складирования, которые можно и нужно использовать при организации работы склада.
Граф-модель в задаче контроля технического состояния тепловоза в эксплуатации
Омский государственный университет путей сообщения, Россия
В структуре парка тягового подвижного состава значительная роль отводится тепловозам, то есть автономным локомотивам, в которых источником энергии передвижения являются двигатели внутреннего сгорания. С целью повышения эксплуатационной надежности и экономичности тепловозов в эксплуатации необходимо совершенствовать методы и средства контроля и оценки их технического состояния [1].
Тепловоз представляет собой сложную техническую систему, для наиболее точной и достоверной оценки качества работы которой необходимо оценить свыше сотни параметров различной физической природы. Очевидно, получить такое количество параметров по результатам приборного контроля, во-первых, практически невозможно, а во-вторых, экономически невыгодно.
Поэтому, при проведении исследований по оценке технического состояния тепловоза, или при разработке какого-либо диагностического оборудования, предназначенного для этих целей, требуется выбрать и экспериментальными и теоретическими методами обосновать минимально необходимое количество контролируемых параметров, оценка которых позволит качественно оценить техническое состояние тепловоза с точки зрения его экономичности, экологической безопасности и функциональных свойств для заданных режимов работы на данном полигоне эксплуатации.
На сегодняшний день проблема выбора наиболее информативных параметров и ограничения их количества остается наименее разработанной, что затрудняет формулировку общего подхода к ее решению и вынуждает в каждом конкретном случае искать частный способ определения номенклатуры контролируемых параметров [2].
Для раскрытия множества соотношений выходных параметров процессов функционирования тепловоза с внутренними параметрами, характеризующими состояние его структуры, а также с входными параметрами, отражающими связи тепловоза с внешней средой и другими объектами, удобно использовать граф-модель [3]. Построение и анализ граф-модели взаимовлияния параметров работы тепловоза позволит найти оптимальное количество параметров контроля, с использованием которых достаточно точно характеризуется техническое состояние контролируемого объекта.
Для построения модели тепловоза, как и для любого другого сложного объекта контроля, на первом этапе моделирования необходимо выбрать наиболее общие свойства функционирования, которые затем должны быть конкретизированы и связаны в единую систему. В качестве наиболее общих свойств выделим следующие: Х1 – свойство автономно преобразовывать внутреннюю химическую энергию топлива в электрическую энергию на выходе силовой установки (дизель-генераторной установки); X2 – свойство использовать полученную электрическую энергию для совершения полезной работы, обеспечивающей движение поезда (создание силы тяги ведущими колесами тепловоза при взаимодействии с рельсами).
Выявив основные свойства, необходимо произвести их детализацию. Так, свойство Х1 можно конкретизировать следующим множеством свойств: х1 – свойство сжимать воздух компрессорами дизеля; х2 – свойство подавать топливо в форсунки и образовывать горючую смесь в цилиндре дизеля; х3 – свойство вырабатывать в процессе горения топлива кинетическую энергию газов; х4 – свойство обеспечивать множество вспомогательных процессов функционирования дизель-генераторной установки; х5 – свойство выбрасывать отработавшие газы и взаимодействовать с окружающей экологической средой; х6 – свойство распределять полученную энергию; х7 – свойство преобразовывать кинетическую энергию газов в электрическую и передавать ее на тяговые электродвигатели.
Ориентированный граф, отображающий отношение множества конкретизированных свойств функционирования силовой установки (свойство Х1) представлен на рисунке 1.
Рисунок 1 Ориентированный граф в пространстве свойств силовой установки тепловоза
Аналогичным образом конкретизировано свойство Х2 и получена соответствующая модель, чем завершен первый этап моделирования.
На последующих этапах моделирования произведено уточнение и дополнение ранее полученных моделей, то есть осуществлена дальнейшая по глубине детализация первоначальных граф-моделей. В результате каждое свойство функционирования тепловоза в эксплуатации представлено определенным сочетанием параметров его рабочих процессов и получена соответствующая граф-модель взаимосвязи конструктивных и эксплуатационных факторов на тяговые, технико-экономические и экологические характеристики автономных дизельных локомотивов. В результате обработки построенной граф-модели функционирования тепловоза в пространстве параметров сформировано оптимальное с точки зрения технических возможностей измерения и экономической целесообразности количество параметров для оценки его технического состояния в эксплуатации.
Выводы: выполненные исследования показали, что учитывая возможности и свойства граф-моделей их можно рекомендовать к широкому применению в задаче контроля технического состояния как тепловоза в целом, так и его отдельных узлов и систем.
Использованные источники
1. , и др. Методы оценки технического состояния, эксплуатационной экономичности и экологической безопасности дизельных локомотивов – М.: , 2007. – 264 с.
2. , , Молчанов диагностика и надежность железнодорожной техники. Часть II / Под ред. . – М.: Компания Спутник+, 2006. – 249 с.
3. , Гельфандбейн на граф-моделях: На примерах авиационной и автомобильной техники. – М.: Транспорт, 1991. – 244 с.
Математическое моделирование виброожижения
Северо-Осетинский государственный университет им. , Россия
(физико-технический факультет, 5 курс)
Науч. рук.: , к. техн. н., доцент
Процесс виброожижения можно описать следующим образом. В сосуд определенных размеров помещается слой мелкозернистого материала. Затем на всю систему накладываются вибрации в вертикальном направлении. При высоком уровне вертикальных колебаний материал ведет себя как псевдожидкость, т. е. обладает свойством текучести. Псевдоожиженным (виброожиженным) называют состояние двухфазной системы (твердые частицы - газ), которое характеризуется перемещением твердых частиц друг относительно друга за счет обмена энергией с каким – либо ее источником (газ, вибрации).[1]
Виброожижение нашло широкое применение в сельском хозяйстве (сепарирование зернового материала), в экологии (очистка газов), в химии (изучение различных порошков), в пищевой промышленности (сушка различных материалов), в нефтеперерабатывающей промышленности (каталитический крекинг нефти) и т. д.
Целью работы является исследование математической модели виброожиженного слоя и анализ полученных результатов. В данной задаче ведутся расчеты изменения доли частиц, занимающих определенный объем в виброожиженном слое, т. е. величины  (
(![]() - порозность), и изменения кинетической энергии частиц. Были использованы следующие нелинейные дифференциальные уравнения второго порядка.[2]
- порозность), и изменения кинетической энергии частиц. Были использованы следующие нелинейные дифференциальные уравнения второго порядка.[2]

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
