
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Методы и алгоритмы распознавания объектов на растровом изображении
Оренбургский государственный университет, Россия
Система распознавания и классификации объектов на растровом изображении может найти широкое применение, как в системах технического зрения, так и в конструкторских САПР, мониторинге хода эксплуатации изделия и других. Примером применения системы распознавания машиностроительных деталей может быть создание конструкторской документации по уже имеющемуся изделию, если это изделие, например, изготавливалось на другом предприятии или отслеживание брака на поточных линиях. Задачу распознавания объекта можно разделить на два этапа: 1) выделение границ или поиск скелета объекта на изображении, т. е. выявление каких-либо его геометрических признаков объекта на изображении; 2) классификация объекта.
Фотография (или набор фотографий в разных проекционных видах) несет намного большее количество информации об изделии, чем кажется на первый взгляд. При соблюдении ряда условий можно получить информацию о точных размерах, взаимном расположении и качестве поверхностей, о свойствах материала из которого изготовлена деталь. При современном уровне развития аппаратных средств есть возможность добиться приемлемого быстродействия системы распознавания за счет оптимизации алгоритмов распознавания.
В настоящий момент для нахождения и классификации объектов на растровом изображении имеется огромное множество алгоритмов и их модификаций. К сожалению, их все невозможно рассмотреть в рамках статьи. Наиболее удачные алгоритмы, используемые в программах распознавания, являются коммерческой тайной и не публикуются. Распространенными и несложными в реализации являются детекторы простых элементов на изображении (рисунок 1) наиболее часто применяемым на сегодняшний день алгоритмом нахождения границ является. Алгоритм Кэнни, который заключается в последовательном применении следующих операций:
1 гауссовская сглаживающая фильтрация;
2 нахождение градиента яркости в каждом пикселе;
3 нахождение максимальных пикселей;
4 гистерезисная фильтрация максимальных пикселей.
Так же нахождение границ можно осуществить с помощью разностных фильтров - линейные фильтры, задаваемые дискретными аппроксимациями дифференциальных операторов (по методу конечных разностей). Простейшим дифференциальным оператором является взятие производной по ![]() -координате
-координате ![]() . Данный оператор определен для непрерывных функций. Существует множество способов определить аналогичный оператор для дискретных изображений при помощи линейного фильтра. В частности, распространенными вариантами являются фильтры Прюита (Prewitt) и Собеля (Sobel).
. Данный оператор определен для непрерывных функций. Существует множество способов определить аналогичный оператор для дискретных изображений при помощи линейного фильтра. В частности, распространенными вариантами являются фильтры Прюита (Prewitt) и Собеля (Sobel).
Морфологические операторы суть фильтры, применяемые для морфологического анализа бинарных изображений. В морфологическом анализе бинарное изображение рассматривается как вид задания формы двумерной геометрической фигуры (пиксели, равные 1, считаются лежащими внутри фигуры, а равные 0 - вовне).
Часто применяемыми составными морфологическими операторами являются открывающий и замыкающий фильтры. Первый состоит в последовательном применении сужающего и расширяющего операторов с одинаковым структурным элементом. Его морфологический эффект заключается в удалении малых изолированных частей фигуры. Применение сначала расширяющего, а затем сужающего оператора дает замыкающий фильтр. Его эффект заключается в заполнении малых изолированных дырок фигуры. В обоих случаях, «малость» объекта определяется размером и формой структурного элемента операторов.
Алгоритмы скелетизации (или истоньшения) позволяют получить скелет изображения, который позволит классифицировать объект. Задача скелетизации, или истоньшения, сводится к построению точек средней линии объектов, содержащихся на растровом изображении с целью их последующего использования для генерации математического представления объекта. Существует несколько разновидностей методов скелетизации и их модификаций. Наиболее полный обзор приведен в [1]. При совершенно разных алгоритмах сами скелеты все равно достаточно сходны.
Волновые алгоритмы могут применятся для поиска скелета изображения, но более эффективны для поиска кратчайшего расстояния.
Например, алгоритм Ли изначально адаптирован под многоугольные фигуры без «дырок». Схему алгоритма можно представить в виде трех шагов:
1 многосвязная область, которую представляет собой многоугольник, превращается в односвязную путем соединения несвязных компонент границы дополнительными ребрами;
2 для построенной на первом шаге односвязной области с помощью алгоритма Ли строится диаграмма Вороного; границей этой области является простой вырожденный многоугольник (он имеет сдвоенные ребра), однако классический алгоритм Ли [1] применим к нему без каких-либо изменений;
3 добавленные ребра удаляются, в их окрестности восстанавливается диаграмма Вороного.
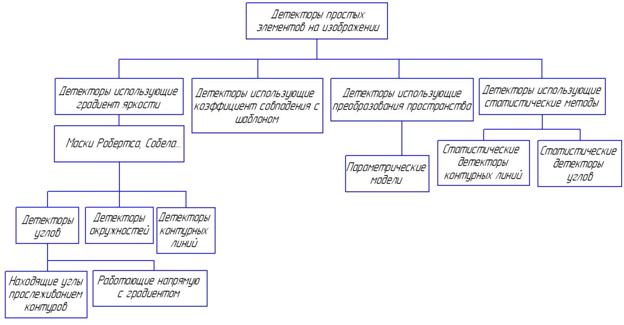
Рисунок 1 Детекторы простых элементов
Возможно применение контекстно-зависимых локальных метрик при решении задач классификации [2]. Построение для каждого изображения собственной локальной метрики, оптимизирующей в заданном контексте иерархию его геометрической близости к другим, позволяет существенно уменьшить число элементарных событий, подлежащих дальнейшему анализу, за счет возможности соотнесения с деформированными изображениями или каким-либо его вариациями.
На сегодняшний день много интересных решений существует в области распознавания текста, карт местности и планов зданий, лиц, автомобильных номеров и в дактилоскопии.
Например, исследователь Хун-Сон Ле (Hung-Son Le) из шведского университета Умеа разработал алгоритмы распознавания лица человека, даже если в базе данных содержится только одно его изображение. Кроме того, алгоритмы определяют сходство с другими лицами. В разработанной системе задействованы скрытые марковские модели (СММ). Благодаря возможности использовать всего одну фотографию, новые алгоритмы, в отличие от других СММ-систем, не требуют затрат времени на обучение на новых изображениях.
Огромное место занимают алгоритмы, основанные на теории нейросетей. Cовременные нейросети используются для задач распознавания изображений, классификации входного образа, то есть для задач статической обработки информации.
Распознавание текста в большинстве случаев основывается на применении систем искусственного интеллекта OCR, известные в России как системы оптического распознавания текста.
Интересное решение представляют системы использующие гибридное редактирование, то есть позволяющие одновременно работать как с инструментами векторной так и растровой графики на одном изображении, например PlanTracer и SpotLight фирмы Consistent Software.
В связи с разнообразием существующих алгоритмов и их модификаций возможно различное построение системы распознавания. Вариант построения такой системы показан на рисунке 2.
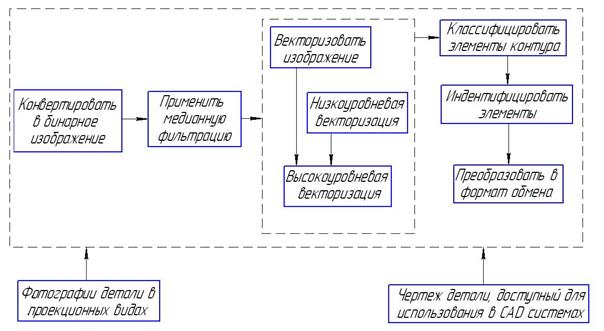
Рисунок 2 Схема системы автоматического распознавания контура детали
Сама по себе система распознавания контура бесполезна, поэтому необходимостью является связь с современными CAD системами.
Использованные источники
1 L. Lam, S. W. Lee, and C.-Y. Suen. “Thinning methodologies – a comprehensive survey”. PAMI-14, (9): 869-885, 1992.
2 Image Retrieval and Classification Using Local Distance Functions./Andrea Frome, Yoram Singer, Jitendra Malik. UC Bercley.
3 Graphics recognition from binary images: one step or two steps./ Jiqiang Song, Min Cai, Michael R. Lyu. the Chinese University of Hong Kong.
4 Быстрые алгоритмы в цифровой обработке изображений. /, Дж.-О. Эклунд, Г. Дж. Нуссбаумер и др.: Под. ред. : Пер. с англ.- М.: Радио и связь, 1984. – 224 с.
5 Математические методы распознавания образов. Курс лекций. , МГУ, ВМиК, кафедра «Математические методы прогнозирования».
Исследование зависимости мощности механических потерь от начальной температуры масла для автотракторных дизелей
В,
Белорусский государственный аграрный технический университет, Беларусь
(АЭФ,4 курс)
Науч. рук.: , к. физ.-мат. н., доцент,
В значительной мере качество ремонта двигателей снижается в результате их неполной приработки по различным режимам, что приводит к снижению долговечности двигателей в условиях эксплуатации с увеличением начального и эксплуатационного износа.
Окончательную приработку двигателей заводы возлагают на эксплуатационников, обязуя их выполнять обкатку в начальный период эксплуатации при пониженных эксплуатационных показателях. Кроме того, возникают дополнительные расходы, вызываемые уменьшением межремонтного пробега в результате повышения износов при эксплуатационной обкатке двигателей, которую выполняют по случайным и бесконтрольным режимам, зачастую водители, не имеющие достаточной квалификации.
Получение в наиболее короткое время полной стендовой приработки двигателей после их ремонта при минимальных износах позволит повысить качество ремонта двигателей [1,2].
Для этого необходимо прирабатывать двигатели по оптимальным скоростным, нагрузочным и температурным режимам [3].
С целью исследования влияния температуры масла на мощность механических потерь в начальный период обкатки в условиях мотороремонтного завода сняты экспериментальные данные с трех двигателей (обозначим их А, В, С), отличающиеся малой, средней и большой начальной мощностью механических потерь, определяемой по моменту сопротивления весовым механизмам стенда на фиксированной частоте вращения.
Экспериментальные данные трех различных типов двигателей А, В, С, внесем в таблицу 1.
Таблица 1 Экспериментальные данные двигателей А, В, С.
Ai | A1 | B1 | C1 | A2 | B2 | C2 | A3 | B3 | C3 |
Тм, ºС | 20 | 20 | 20 | 30 | 30 | 30 | 40 | 40 | 40 |
Nмп, кВт | 11,94 | 12,81 | 14,13 | 10,29 | 11,04 | 12,18 | 9,07 | 9,74 | 10,81 |
Ai | A4 | B4 | C4 | A5 | B5 | C5 | A6 | B6 | C6 |
Тм, ºС | 50 | 50 | 50 | 60 | 60 | 60 | 70 | 70 | 70 |
Nмп, кВт | 8,22 | 8,9 | 9,98 | 7,56 | 8,31 | 9,39 | 7,2 | 7,87 | 8,85 |
где Тм – температура масла (ºС);
Nмп – мощность механических потерь, соответствующая данной температуре (кВт);
Аi, Bi, Ci – контрольные точки двигателей A, B,C соответственно.
Построим графики зависимости мощности механических потерь от температуры масла для двигателей A, B,C (рис.1)
Рисунок 1 Графики зависимости мощности механических потерь от температуры масла
Анализируя вид зависимости мощности механических потерь Nмп от температуры масла Tм, видим, что она близка к экспоненциальной. Поэтому будем искать функцию Nмп, описывающую данную зависимость, в виде:
 , (1)
, (1)
где α и β – неизвестные параметры, которые подлежат определению.
Для нахождения этих параметров (коэффициентов) прологарифмируем обе части равенства (1):
 , (2)
, (2)
Далее используем данные из таблицы 1 для двигателей типа C. Подставляя в уравнение (2) пару точек С1 и С3, получим систему линейных уравнений для определения параметров α и lnβ :
 (3)
(3)
Вычитая из первого уравнения системы второе уравнение, находим коэффициент α:

Аналогично для всех пар точек (В1,С4),(С3,С5),(С1,С6),(С2,С5),(В1,С5) получаем системы (4)-(7):
 α= -0,01, β=16,44; (4)
α= -0,01, β=16,44; (4)
 α= -0,007, β=14,3; (5)
α= -0,007, β=14,3; (5)
 α= -0,0094, β=17,08; (6)
α= -0,0094, β=17,08; (6)
 α= -0,0087, β=15,
α= -0,0087, β=15,
Аналогично для двигателей типа В и А составляем соответствующие системы уравнений.
Результаты вычислений поместим в таблицу 2
Таблица 2 Расчетные значения коэффициентов зависимости мощности механических потерь от температуры масла.
Двигатель типа А | Двигатель типа В | Двигатель типа С | ||||||
α | β | α | β | α | β | |||
20º | -0,0135 | 18,54 | 20º | -0,0135 | 16,78 | 20º | -0,014 | 15,8 |
11,94 | 11,81 | 14,13 | ||||||
30º | -0,01 | 16,44 | 30º | -0,0105 | 15,1 | 30º | -0,011 | 14.3 |
10,29 | 11,04 | 12,18 | ||||||
40º | -0,007 | 14,3 | 40º | -0,008 | 13,46 | 40º | -0,09 | 12,94 |
9,07 | 9,74 | 10,81 | ||||||
50º | -0,01 | 16,44 | 50º | -0,0105 | 15,1 | 50º | -0,011 | 14,3 |
8,22 | 8,9 | 9,98 | ||||||
60º | -0,0087 | 15,82 | 60º | -0,0093 | 14,57 | 60º | -0,0103 | 14.0 |
7,56 | 8,31 | 9,39 | ||||||
70º | -0,0094 | 17,08 | 70º | -0,0098 | 15,58 | 70º | -0,0102 | 14,64 |
7,2 | 7,87 | 8,85 |
Таким образом, нами получена следующая формула, описывающая зависимость мощности механических потерь от температуры смазывающего масла:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
