

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() . (1.14)
. (1.14)
Внутри этого элемента введем аппроксимации:
![]() , (1.15)
, (1.15)
где ![]() содержит в себе некоторые функции, элементами которой являются полиномы. Вектор деформации (1.2) можно вычислить с помощью выражения (1.15):
содержит в себе некоторые функции, элементами которой являются полиномы. Вектор деформации (1.2) можно вычислить с помощью выражения (1.15):
![]() . (1.16)
. (1.16)
Выражение энергии на элементе получим путем подстановки (1.15), (1.16) в (1.12):
 . (1.17)
. (1.17)
(1.17) запишется в следующем виде, так как на элементе параметры ![]() постоянны:
постоянны:
![]() , (1.18)
, (1.18)
где
 ,
,
 . (1.19)
. (1.19)
![]() - матрица жесткости элемента,
- матрица жесткости элемента, ![]() - вектор узловых сил.
- вектор узловых сил.
Функционал энергии для всего тела строится как сумма значений энергии по всем элементам. Считается, что для всех прилегающих элементов перемещения узлов, которые принадлежат разным элементам, одинаковы. Физически это означает, что выполняются условия неразрывности поля перемещений во всей области тела. Когда выполниться операция сборки, получим:
 . (1.20)
. (1.20)
Вектор ![]() включает в себя узловые перемещения всего тела, матрица
включает в себя узловые перемещения всего тела, матрица ![]() это матрица жесткости всего тела, состоящая из суммы матриц
это матрица жесткости всего тела, состоящая из суммы матриц ![]() , вектор
, вектор ![]() - вектор внешних сил, который состоит из заданных сосредоточенных нагрузок и суммы поэлементных сил
- вектор внешних сил, который состоит из заданных сосредоточенных нагрузок и суммы поэлементных сил ![]() .
.
Необходимо найти такой вектор ![]() согласно методу Ритца, который дает минимум энергии Э. Равенство нулю первой вариации минимума полной энергии является необходимым и достаточным условием:
согласно методу Ритца, который дает минимум энергии Э. Равенство нулю первой вариации минимума полной энергии является необходимым и достаточным условием:
![]() , (1.21)
, (1.21)
Получим алгебраическую задачу вследствие симметричности матрицы ![]() :
:
![]() . (1.22)
. (1.22)
После решения этой системы найдем вектор ![]() , позволяющий найти распределение напряжений в теле и однозначно определяющий поле перемещений, это и является в задачах теории упругости конечной целью.
, позволяющий найти распределение напряжений в теле и однозначно определяющий поле перемещений, это и является в задачах теории упругости конечной целью.
Особенность задания аппроксимации является отличие метода Ритца от МКЭ: в классическом методе Ритца неизвестные параметры ![]() не имеют явного физического смысла, а в МКЭ неизвестными параметрами являются узловые перемещения и аппроксимация определяется поэлементно.
не имеют явного физического смысла, а в МКЭ неизвестными параметрами являются узловые перемещения и аппроксимация определяется поэлементно.
Двумерная аппроксимация( прямоугольная область)
На прямоугольнике простейшая аппроксимация определяется в виде билинейной функции:
![]() (1.23)
(1.23)
И она требует задания значения функций ![]() в четырех вершинах.
в четырех вершинах.
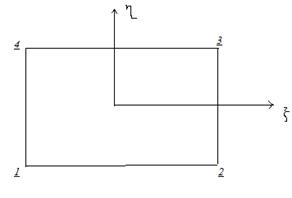
Совместность данной аппроксимации определяется за счет линейности функции (1.23) вдоль каждой из граней, которые однозначно определяются двумя узловыми значениями в вершинах, которые прилегающих к данной стороне.
Здесь вводятся локальные координаты ![]() , в которых исходный прямоугольник становится квадратом
, в которых исходный прямоугольник становится квадратом ![]() , и относительно них уже определяются аппроксимирующие функции. Для области переход от производных
, и относительно них уже определяются аппроксимирующие функции. Для области переход от производных  к
к  осуществляется с помощью соотношений:
осуществляется с помощью соотношений:
 (1.24)
(1.24)
Полином (1.23) в координатах ![]() записывается как:
записывается как:
![]() (1.25)
(1.25)
Функции формы получим в виде:
 (1.26)
(1.26)
В этих выражениях функции формы имеют вид произведения двух одномерных линейных функций форм ![]() . Семейство таких двумерных аппроксимаций носит название Лагранжевого, а функции формы состоят из произведения одномерных полиномов Лагранжа соответствующего порядка.
. Семейство таких двумерных аппроксимаций носит название Лагранжевого, а функции формы состоят из произведения одномерных полиномов Лагранжа соответствующего порядка.
2.Основные законы упруго-пластических деформаций.
Если происходит деформация твердых тел под действием внешних приложенных сил и при устранении этих сил тело получает постоянные или временные пластические деформации, то такое явление называется пластичностью. Основное свойство пластических деформаций: между возникающими в теле напряжениями и деформациями нет взаимно однозначной зависимости, другими словами по данным напряжениям невозможно отыскать деформации и наоборот.
Все твердые тела при различных деформациях обладают пластическими свойствами. В теории упругости при некоторых условиях пластическими свойствами тел пренебрегают.
Упругое состояние твердого тела – это состояние, при котором независимо от времени есть взаимно однозначная зависимость между деформациями и напряжениями для каждой температуры тела.
Пластическое состояние твердого тела – это состояние, при котором если известны соответствующие значения температуры и все предыдущие деформированные напряженные состояния, то для данной температуры связь между напряжениями и деформациями в каждый данный момент времени становится взаимно однозначной.
Закон Гука; сжимаемость тела и условие пластичности.
В теле до некоторых пределов существует упругая деформация, когда к нему приложена некоторая нагрузка. Эта упругая деформация подчиняется закону Гука. Можно сформулировать закон Гука как:
1) направляющие гиперболоиды в каждой точке тела или направляющие тензоры напряжений и деформаций направляющие совпадают:
![]() ( 2.1)
( 2.1)
2) если объем элемента тела изменяется, то это изменение прямо пропорционально среднему нормальному напряжению:
![]() (2.2)
(2.2)
где К модуль объемной деформации.
3) квадратичные инварианты девиаторов напряжений и деформаций пропорциональны или октаэдрическая деформация прямо пропорционально октаэдрическому напряжению
![]()
![]() (2.3)
(2.3)
где ![]() модуль сдвига. Закон Гука в соответствующей форме имеет более наглядный механический смысл, и его инвариантность более понятна для различных координатных осей, чем в форме шести соотношений. Соотношение (2.1) разрешим относительно тензора деформаций, получим:
модуль сдвига. Закон Гука в соответствующей форме имеет более наглядный механический смысл, и его инвариантность более понятна для различных координатных осей, чем в форме шести соотношений. Соотношение (2.1) разрешим относительно тензора деформаций, получим:
![]() (2.4)
(2.4)
Найдем в проекциях на оси ![]() отсюда:
отсюда:
 (2.5)
(2.5)
Модуль Юнга ![]() и коэффициент Пуассона
и коэффициент Пуассона ![]() выражаются формулами через
выражаются формулами через ![]() и
и ![]() как:
как:
 (2.6)
(2.6)
Уравнение (2.1) разрешая относительно тензора напряжений, тогда:
![]() (2.7)
(2.7)
Имеем в проекциях на оси ![]() отсюда:
отсюда:
 (2.8)
(2.8)
где ![]() - относительное объемное расширение и
- относительное объемное расширение и ![]() - постоянная Ляме:
- постоянная Ляме:
![]()
В проекциях на оси уравнение (1) даст:
![]() (2.9)
(2.9)
где ![]() - компоненты девиаторов
- компоненты девиаторов ![]() и
и ![]() в осях
в осях ![]() где:
где:
 (2.10)
(2.10)
Найдем выражение потенциальной энергии:
![]() (2.11)
(2.11)
Перепишем (2.11) как:
![]() (2.12)
(2.12)
Перемножим этих соотношения и приведем подобных членов, отсюда получим:
![]() (2.13)
(2.13)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
